1
Изобретение относится к электротехнике, а именно к управляемому электроприводу подъемно-транспортйых машин и может быть использовано, например, на экскаваторах-драглайнах, опортальных и строительных кранах.
Известно устройство для управления приводом экскаватора, например шагающего драглайна, включаюш.ее блок определения длительности цикла, соединенный с задающими блоками приводов механизмов подъема, тяги и поворота, датчика определения длин подъемного и тягового канатов в цикле На разгрузку, датчики скоростей приводов механизма подъема тяги и поворота и программный блок 1.
В известном устройстве сигнал управления приводом механизма поворота не содержит информации об угловом отклонении ковша, что приводит к значительным ошибкам в процессе приведения ковша в точке копания и разгрузки.
Известно устройство для управления приводом механизма поворота экскаватора, например шагающего драглайна, включающее датчик угла поворотной платформы, датчик
угла отклонения ковша, датчик длин подъемного и тягового канатов, соединенные с последовательно включенными в электрическую цепь функциональным преобразователем, блоком определения торможения, блоком определения ускорения и модулятором, к другому входу которого подключены последовательно соединенные между собой датчик углового отклонения ковша, сумматор, дифференциатор и релейное звено вычислите10 -ля 2.
В этом устройстве вычисляется управление для быстрейшего перевода ковша в точку покоя, причем так, чтобы значение абсолютной ошибки и ее скорости были нулевыми. Однако при этом относительная и переносная составляюшие оказываются ненулевы15ми, что устраняет возможность удержания ковша в точке покоя. Кроме того, показатели точности системы существенно зависит от начальных значений углового отклонения ковша.
20
Известно также устройство для управления электроприводом поворота экскаваторадраглайна, содержащее датчики угла и скорости вращения поворотной платформы, датчики угла и скорости отклонения ковща.
пульт управления, блок прогноза входы которого соединены с выходами датчиков угла и скорости отклонения ковша и выходом датчика скорости вращения поворотной платформы, силовой преобразователь электропривода поворота с управляющим входом 3.
Недостатком данного устройства является низкое быстродействие из-за автоматического приведения ковща и платформы к требуемому месту в забое только в обратном цикле.
Цель изобретения - повышение быстродействия.
Цель достигается тем, что устройство снабжено блоком формирования угла поворота платформы и командным блоком, один из входов которого соединен с выходом блока прогноза, три других входа соединены с блоком формирования угла поворота платформы, а выход - с управляющим входом силового преобразователя, один из входов блока формирования угла поворота платформы соединен с датчиком угла вращения поворотной платформы, а три других его входа соединены с пультом управления.
При этом блок формирования угла поворота выполнен в виде двухлинейных трансформаторов, четырех электромагнитных муфт, трез реле и следящего узла, причем вал одного из линейных трансформаторов соединен посредством одной из электромуфт с первым входом блока формирования угла поворота платформы, а через вторую электромагнитную муфту -с валом следящего блока, вал другого линейного трансформатора соединен с третьей электромагнитной муфтой, вал которой является первым входом блока формирования угла поворота платформы, а через четвертую электромагнитную муфту - с валом следящего блока, один из выводов катушки первого реле через первый контакт третьего реле и один из выводов катущки второго реле через второй контакт третьего реле соединены между собой и являются вторым входом блока формирования угла поворота платформы, те же выводы катушек первого реле через третий контакт третьего и второго реле и через четвертый контакт третьего реле соединены между собой и являются третьим входом блока формирования угла поворота платформы, выход первого линейного трансформатора через первый контакт первого реле соединен с первым входом следящего угла и через пятый и шестой контакты третьего реле соответственно является первым и вторым выходами блока формирования угла поворота платформы, выход второго линейного трансформатора через первый контакт второго реле соединен с вторым входом следящего узла и через седьмой и восьмой контакты третьего реле соединены соответственно с первым и вторым выходами блока формирования угла поворота платформы, один из выводов обмоток управления первой и второй
электромагнитных муфт соответственно через второй и третий контакты первого реле соединены с одним из выводов катушки первого реле, один из выводов обмоток управления третьей и четвертой электромагнитных
муфт соответственно через второй и третий контакты второго реле соединены с одним из выводов катущки второго реле, один из выводов катушки третьего реле является четвертым входом блока формирования угла поворота платформы, вторые выводы катушек первого, второго и третьего реле, а также обмоток управления электромагнитных муфт заземлены.
Кроме того командный блок выполнен в виде шести операционных усилителей, двух
релейных элементов и двух реле, при этом входы первого и второго операционных усилителей являются соответственно первым и вторым входами командного блока, а выход первого операционного усилителя соединен с первым входом третьего операционного
усилителя и через первый контакт первого реле с вторым входом шестого операционного усилителя, который через второй контакт первого реле соединен с выходом четвертого операционного усилителя, выход второго операционного усилителя соединены с входом четвертого операционного усилителя, с третьим входом второго релейного элемента и с вторым входом третьего операционного усилителя, выход которого соединен через третий контакт первого реле с первым входом шестого операционного усилителя, с входом пятого операционного усилителя и с вторым входом второго релейного элемента, первый вход которого через пятый контакт первого реле и первый контакт второго реле, а также через шестой контакт первого реле и второй контакт второго реле соединен с выходом пятого операционного усилителя, который через четвертый контакт первого реле соединен с первым входом шестого операционного усилителя, выход которого соединен с первым входом первого релейного элемента, второй вход которого является третьим входом командного блока, выход второго релейного элемента соединен с одним из выводов катушки первого реле, а один из выводов катушки второго реле яв ляется четвертым входом командного блока, вторые выводы катушек первого и второго реле заземлены, выход первого релейного элемента является выходом командного блока. На фиг. 1 приведена функциональная
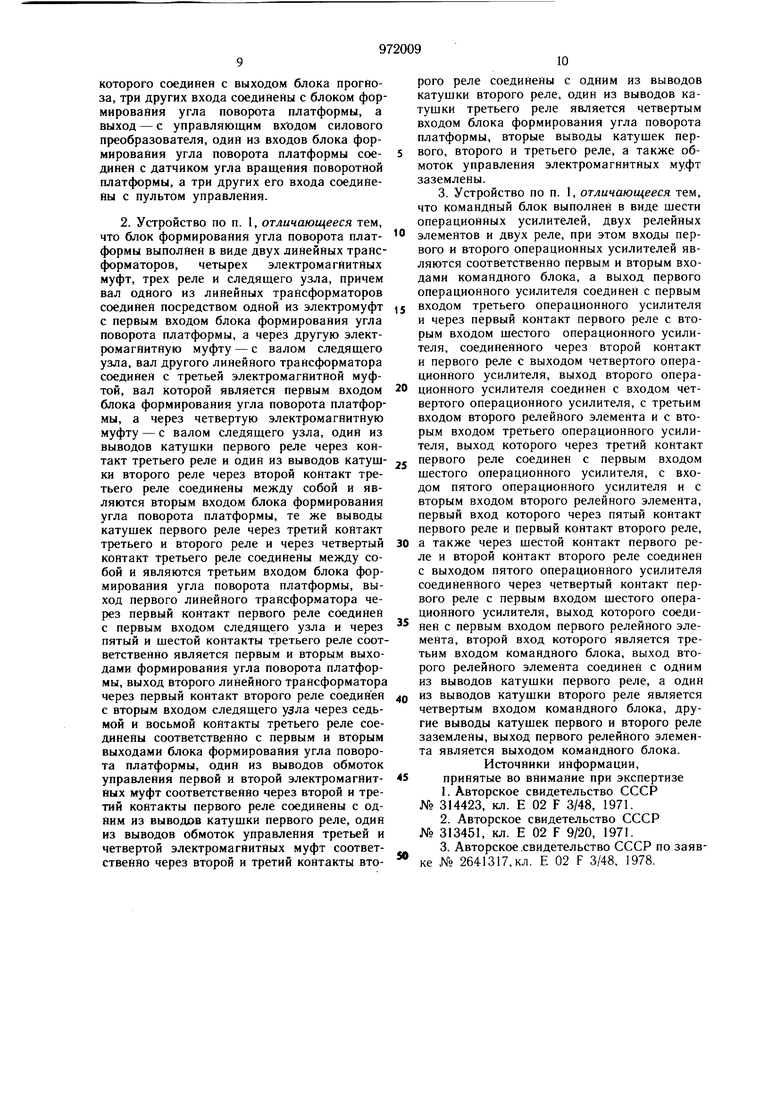
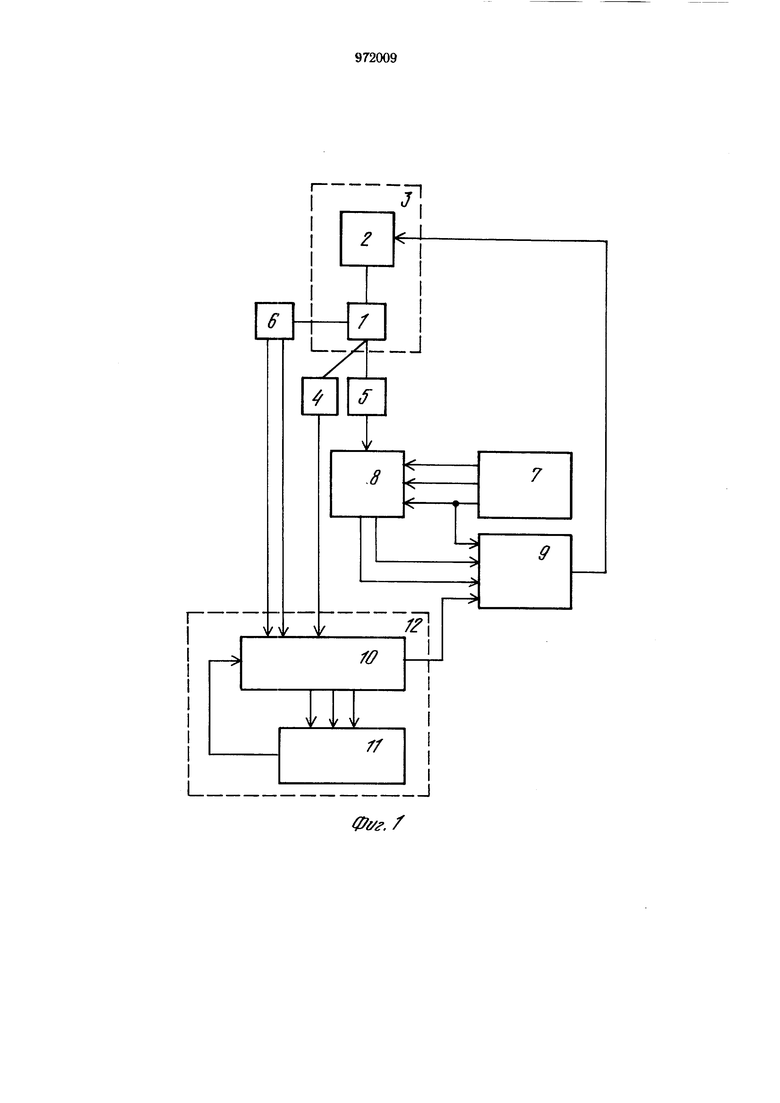
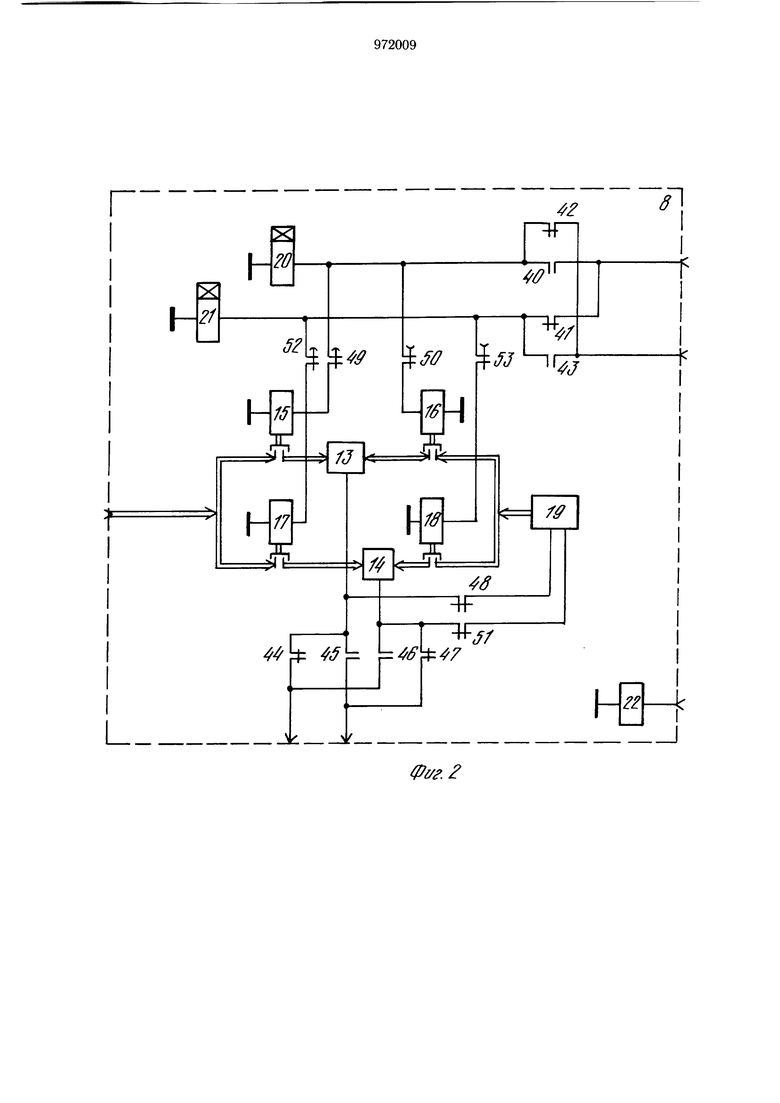
0 схема устройства для управления электроприводом поворота экскаватора-драглайна; на фиг. 2- функциональная схема блока формирования угла поворота платформы; на фиг. 3 - функциональная схема командного блока; на фиг. 4 - функциональная схема
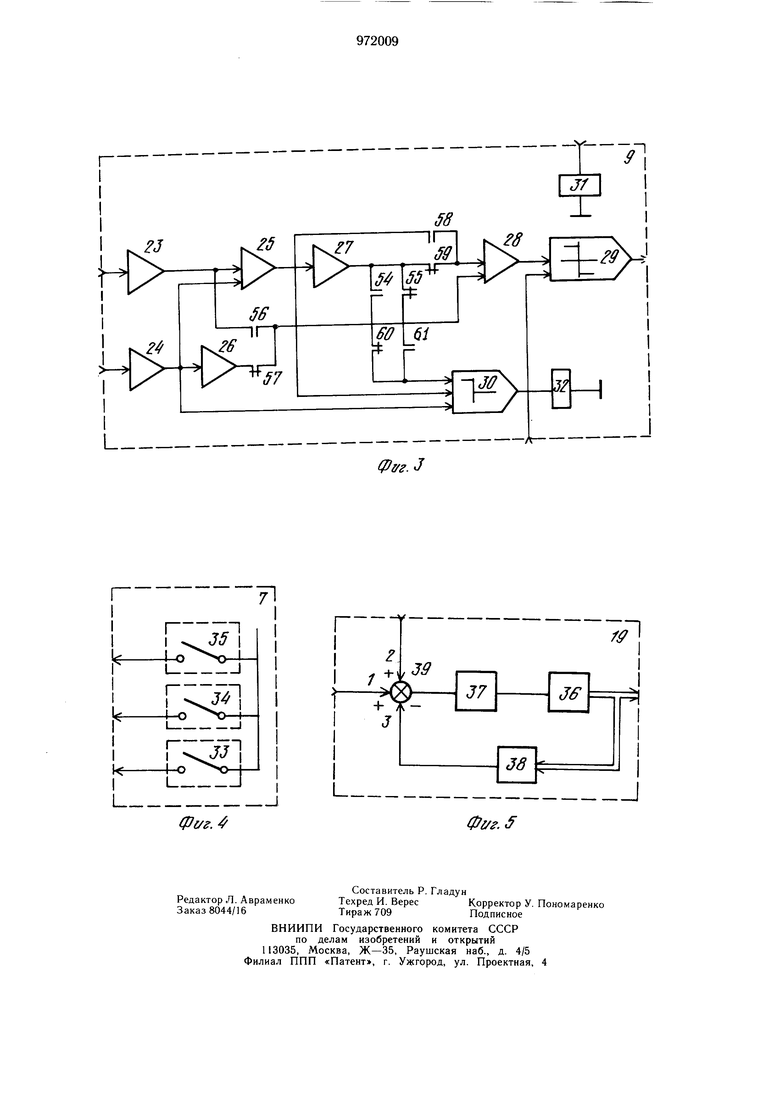
5 пульта управления и На фиг. 5 - функциональная схема следящего узла, входящего в состав блока формирования угла поворота платформы. Устройство содержит электродвигатель 1, силовой преобразователь 2, образующие силовую часть электропривода 3 поворота экскаватора, датчик 4 скорости и датчик 5 угла вращения поворотной платформы, датчик 6 угла и скорости отклонения ковша, пульт 7 управления, блок 8 формирования угла поворота платформы, командный блок 9 блок 10 прогнозирования угла поворота и блок 11 прогнозирования скорости поворота платформы, блоки 10 и 11 образуют блок 12 прогноза. Электродвигатель 1 подключен к силовому преобразователю 2,- управляющий вход которого соединен с выходом блока 9, один из входов которого соединен с выходом блока 12, являющимся одновременно одним из выходов блока 10. Остальные три выхода блока 10 соединены с соответствующими тремя входами блока 11, выход которого подключен к одному из входов блока 10. Три других входа блока 10 соединены с двумя выходами датчика бис выходом датчика 4. Один из входов блока 8 соединен с выходом датчика 5, а три других его входа соответственно соединены с тремя выходами пульта 7 управления, один из которых также соединен с вторым входом блока 9. два выхода блока 8 соединены с двумя оставщимися входами блока 9. Блок 8 формирования угла поворота платформы (фиг. 2) содержит два линейных трансформатора 13 и 14, четыре электромагнитных муфты 15, 16, 17 и 18, следящий узел 19, три реле 20, 21 и 22. Командный блок 9 содержит шесть операционных усилителей 23-28 два релейных элемента 29 и 30 и два реле 31 и 32. Пульт 7 управления содержит тумблеры 33, 34 и 35. Одни из выводов тумблеров соединены между собой, а другие выводы образуют выходы пульта. Следящий узел 19 (фиг. 5), входящий в состав блока формирования угла поворота платформы 8, содержит электродвигатель 36, усилитель-регулятор 37, тахогенератор 38 и компаратор 39. Выходом блока 19 является вал электррдвигателя 36. Первые два входа компаратора 39 образуют два входа блока 19, соответственно, а третий вход соединен с выходом тахогенератора 38, вал которого соединен с валом электродвигателя 36. Выход компаратора 39 соединен с входом усилителя-регулятора 37, выход которого подключен к входу электродвигателя 36. Реле 22 имеет контакты 40-47 реле 20 имеет контакты 48, 49 и 50, реле 21 - контакты 51-53, реле 31-контакты 54 и 55, реле 32-контакты 56-61, Входы операционных усилителей 23 и 24 соединены соответственно с первым и вторым входами блока 9. Выход операционного усилителя 23 соединен с первым входом операционного усилителя 25 и через контакт 56 с вторым входом операционного усилителя 28, который через контакт 57 соединен с выходом операционного усилителя 26. Выход операционного уси-.. лителя 24 соединен с вторым входом операционного усилителя 25, с входом операционного усилителя 26 и с третьим входом релейного элемента 30. Выход операционного усилителя 25 соединен через контакт 58 с нервым входом операционного усилителя 28, с входом операционного усилителя 27 и с вторым входом релейного элемента 30. Первый вход релейного блока 30 через контакты 60 и 54 и через контакты 61 и 55 соединен с выходом операционного усилителя 27. Выход операционного усилителя 27, контакт 59 соединены с первым входом операционного усилителя 28. Первый вход релейного блока 29 соединен с выходом операционного усилителя 28, а второй вход образует третий вход блока 9. Выход релейного блока 30 соединен с одним из выводов катушки реле 32. Один из выводов катушки реле 31 образует четвертый вход блока 9. Другие выводы катушек реле 31 и 32 заземлены. Валы линейных трансформаторов 13 и 14 соединены соответственно через электромагнитные муфты 15 и 17 с валом датчика 5, а через электромагнитные муфты соответственно 16 и 18 с валом следяющего узла 19. Входы блока 12 соответственно через контакты 48 и 51 соединены с выходами линейных трансформаторов 13 и 14. Выход линейного трансформатора 13 через контакты 44 и 45 соединен соответственно с первым и вторым выходами блока 8, и выход линейного трансформатора 14 через контакты 46 и 47 также соединен с первым и вторым выходами блока 8. Один из выводов обмо к управления электромагнитных муфт 15 и 16 соответственно через контакты 49 и 50 соединен с одним из выводов катушки реле 20, который, в свою очередь, через контакты 40 и 42 реле 22 соединен соответственно с вторым и третьим входами блока 8. Один из выводов обмоток управления электромагнитных муфт 17 и 18 соответственно через контакты 52 и 53 соединен с одним из выводов катушки реле 21, который через контакты 41 и 43 соединен соответственно с вторым и третьим входами блока 8. Один из выводов катушки реле 22 образует четвертый вход блока 8. Другие выводы катушек реле 20, 21 и 22 и обмоток управления электромагнитных муфт 15, 16, 17 и 18 заземлен. Устройство работает следующим образом С пульта управления 7 с помощью тумблеров 33, 34 и 35 соответственно осуществляется выбор направления вращения экскаватора, фиксация точки копания и фиксация точки разгрузки. При левом вращении тумблер 33 выключен - реле 22 и 31 обесточены. При правом - тумблер 33 включен. После выбора направления вращения, согласно
техйологической схеме отработки забоя, осуществляется фиксация точки копайия.
Рассмотрим работу устройства при левом вращении (при правом) экскаватора. Для фиксации точки копайия включается тумблер 34, при этом следящий узел 19 чер: контакты 48 (51), включаясь на выход Л:. сйиого трансформатора 13 (14)) через злектромагнитную муфту 16 (18) устанавливает в Нуль выход линейного трансформатора 13 (14). После необходимой задержки для установки в Нуль выхода линейного трансформатора 13 (14) реле 20 (21) своими контактами 48 (51), 50 (53) и 49 (52) одновременно производит соответственно отключение входа следящего узла 19, обесточивание обмотки управления электромагнитной муфты 16 (18), тем самым освобождая вал линейного трансформатора 13 (14) от вала следящего блока 19, и включение обмотки управления электромагнитной муфты 15 (17) соединяя вал линейного трансформатора 13 (14) с валом датчика угла вращения поворотной платформы 5. При повороте экскаватора в точку разгрузки ковща линейный трансформатор 13 (14) измеряет угол поворота от точки копания. В точке разгрузки ковща включением тумблера 35 производится фиксация точки разгрузки. При этом через контакты 51 (48), 53 (50) реле 21 (20): как при фиксации точки копания, следящий блок 19 через электромагнитную муфту 18 (16) устанавливает в Нуль выход линейного трансформатора 14 (13), а через контакт 52 (49) реле 21 (20) электромагнитная муфта 17 (15) соединяет вал линейного трансформатора 14 (13) с валом датчика угла 15ращения поворотной платформы 5 для измерения угла поворота платформы экскаватора от точки разгрузки. Контактами 44-47 реле 22 обеспечивает на выходе операционного усилителя 23 командного блока 9 сигнал, пропорциональный углу поворота от точки копаНия независимо от Направления вращения экскаватора, а на выходе операционного усилителя 24 сигнал, пропорциональный углу поворота от точки разгрузки. Сигнал на выходе операционного усилителя 25 в процессе поворота экскаватора постоянен и пропорционален требуемому углу поворота. Сигнал На выходе операционного усилителя 28 пропорционален ошибке по углу, равной разности требуемого угла поворота и текущего угла поворота. Операционный усилитель 26 служит для инвертирования сигнала, пропорционального текущему углу поворота от точки разгрузки KOBHia, а операционный усилитель 27 - сигнала, пропорционального требуемому углу поворота. Релейный элемент 30 и реле 32 служат для определения момента окончания прямого цикла, при этом переключение контактов 56, 57, 58, 59, 60 и 61 реле 32 приводит к изменению величины и знака сигнала
ощибки по углу на выходе операционного уси лителя 28. В блоке прогнозирования угла поворота 10, работающего в ускоренном масштабе времени по сравнению с реальным объектом, производится постоянное вычислеНие значения прогнозируемого угла поворота с Начальных условий, равных текущему состоянию фазовых координат платформы и ковща.
В блоке 11 прогнозирования скорости, работающем в ускоренном масщтабе времени по сравнению с блоком 10, производится прогнозирование значения скорости поворота платформы экскаватора, которую имеет платформа, если в текущий момент времени осуществляется маневр успокоения ковща.
Когла в блоке 11 прогнозированное значение скорости достигает нуля, в блоке 10 формируется будущ,ая траектория движения платформы, обеспечивающая остановку платформы и ковща с нулевой скоростью. С выхода блока 10 прогнозированное значение угла поворота поступает на вход релейного элемента 29, где на входе определяется прогнозируемая ощибка по углу, равная разности ощибки по углу и прогнозируемого значения угла поворота платформы экскаватора.
5 В зависимости от знака прогнозируемой ощибки релейный блок 29 формирует управляющее воздействие, обеспечивающее максимально быстрый разворот платформы экскаватора за счет движения с максимально допустимым ускорением и точную осга0 новку ковща и платформы с Нулевой скоростью. Управляющее воздействие с выхода релейного блока 29 поступает на вход силового преобразователя 2 электропривода 3.
Ручная фиксация точек копания и разгрузки осуществляется один раз перед группой автоматизированных циклов отработки забоя.
Изобретение позволяет получить поло0 жительНый эффект в народном хозяйстве за счет увеличения производительности. Надежности и долговечности электрооборудования и уменьщения динамических нагрузок на конструкцию мощных экскаваторовдраглайнов. Устройство может быть реализовано на серийных элементах непрерывной и дискретной вычислительной техники.
Формула изобретения
1. Устройство для управления электроприводом поворота экскаватора-драглайна, содержащее датчики угла и скорости вращения поворотной платформы, датчики угла и скорости отклонения ковша, пульт управления, блок прогноза и силовой преобразователь, отличающееся тем, что с целью повышения быстродействия, оно снабжено с блоком формирования угла поворота платкоторого соединен с выходом блока прогноза, три других входа соединены с блоком формирования угла поворота платформы, а выход - с управляющим вхъдом силового преобразователя, один из входов блока формирования угла поворота платформы соединен с датчиком угла вращения поворотной платформы, а три других его входа соединены с пультом управления.
2. Устройство по п. 1, отличающееся тем, что блок формирования угла поворота платформы выполнен в виде двух линейных трансформаторов, четырех электромагнитных муфт, трех реле и следящего узла, причем вал одного из линейных трансформаторов соединен посредством одной из электромуфт с первым входом блока формирования угла поворота платформы, а через другую электромагнитную муфту - с валом следящего узла, вал другого линейного трансформатора соединен с третьей электромагнитной муфтой, вал которой является первым входом блока формирования угла поворота платформы, а через четвертую электромагнитную муфту - с валом следящего узла, один из выводов катущки первого реле через контакт третьего реле и один из выводов катущки второго реле через второй контакт третьего реле соединены между собой и являются вторым входом блока формирования угла поворота платформы, те же выводы катушек первого реле через третий контакт третьего и второго реле и через четвертый контакт третьего реле соединены между собой и являются третьим входом блока формирования угла поворота платформы, выход первого линейного трансформатора через первый контакт первого реле соединен с первым входом следящего узла и через пятый и шестой контакты третьего реле соответственно является первым и вторым выходами формирования угла поворота платформы, выход второго линейного трансформатора через первый контакт второго реле соединен с вторым входом следящего узла через седьмой и восьмой контакты третьего реле соединены соответственно с первым и вторым выходами блока формирования угла поворота платформы, один из выводов обмоток управления первой и второй электромагнитйых муфт соответственно через второй и третий контакты первого реле соединены с одним из выводов катущки первого реле, один из выводов обмоток управления третьей и четвертой электромагнитных муфт соответственно через второй и третий контакты второго реле соединены с одним из выводов катушки второго реле, один из выводов катушки третьего реле является четвертым входом блока формирования угла поворота платформы, вторые выводы катушек первого, второго и третьего реле, а также обмоток управления электромагнитных муфт заземлены.
3. Устройство по п. 1, отличающееся тем, что командный блок выполнен в виде шести операционных усилителей, двух релейных элементов и двух реле, при этом входы первого и второго операционных усилителей являются соответственно первым и вторым входами командного блока, а выход первого операционного усилителя соединен с первым входом третьего операционного усилителя и через первый контакт первого реле с вторым входом шестого операционного усилителя, соединенного через второй контакт и первого реле с выходом четвертого операционного усилителя, выход второго операционного усилителя соединен с входом четвертого операционного усилителя, с третьим входом второго релейного элемента и с вторым входом третьего операционного усилителя, выход которого через третий контакт первого реле соединен с первым входом шестого операционного усилителя, с входом пятого операционного усилителя и с вторым входом второго релейного элемента, первый вход которого через пятый контакт первого реле и первый контакт второго реле, а также через шестой контакт первого реле и второй контакт второго реле соединен с выходом пятого операционного усилителя соединенного через четвертый контакт первого реле с первым входом шестого операционного усилителя, выход которого соединен с первым входом первого релейного элемента, второй вход которого является третьим входом командного блока, выход второго релейного элемента соединен с одним из выводов катушки первого реле, а один из выводов катушки второго реле является четвертым входом командного блока, другие выводы катушек первого и второго реле заземлены, выход первого релейного элемента является выходом командного блока.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 314423, кл. Е 02 F 3/48, 1971.
2.Авторское свидетельство СССР № 313451, кл. Е 02 F 9/20, 1971.
3.Авторское .свидетельство СССР по заявке № 2641317, кл. Е 02 F 3/48, 1978.
I
J
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматизированного управления транспортными перемещениями ковша экскаватора-драглайна | 1989 |
|
SU1788163A1 |
| Система управления гелиостатом | 1983 |
|
SU1155993A1 |
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ДИАГНОСТИРОВАНИЯ РЕЛЕЙНОЙ ЗАЩИТЫ | 1988 |
|
RU1769629C |
| КУРСОВАЯ СИСТЕМА | 2008 |
|
RU2381452C1 |
| Устройство для автоматического управления подачей электрода в дуговой печи | 1989 |
|
SU1716627A1 |
| Релейное устройство | 1986 |
|
SU1403137A1 |
| Устройство для определения положения экскавационной машины в пространстве | 1980 |
|
SU937622A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ОТКЛОНЕНИЯ РАБОЧЕГО | 1973 |
|
SU374422A1 |
| Устройство управления прядильной машиной | 1985 |
|
SU1341271A1 |
| Регулятор мощности дуговой электропечи | 1981 |
|
SU1029432A1 |
/ f
/ f f
I.I
7
//
2{/. /
н
4
I
Jf
-46 7
|-/
/
Фг/г.
-JySЛ
л:
58
25
J
II
59
4f
55
5
II
гб
2
57
eo
5/
Y
I
(PffZ.J
