1
Изобретение относится к автоматизации производственных процессов на открытых горных разработках, в частности к средствам автомагического контроля технологических процессов на карьерах.
Известно устройство для определения отклонения рабочего органа роторного экскаватора от поверхности бокового откоса, включа-ЮЩее блоки задания вертикальных опорных, плоскостей в неподвижной системе координат, подключенные ж блокам определения отклонений контрольных точек относительно опорных плоскостей, датчик определения высоты подъема центра роторного колеса в подвижной системе координат и блоки определения углов поворота роторной стрелы, рыскания и поперечного наклона корпуса экскаватора.
Целью изобретения является автоматический/, контроль величины отклонения рабочего органа-.
Для этого устройство 1выполнено с блоком 0|Пределения радиуса резания, вход которого соединен с выходом датчика определения высоты подъема центра роторного колеса и с блоком определения синуса суммы углов рыскания и поворота стрелы, входы которого соединены с выходами блоков определения углов поворота роторной стрелы и рыскания корпуса экскаватора, блоком определения
действительной ординаты конца радиуса резания, соединенного с блоком определения отклонения рабочего органа от заданной поверхности .бокового откоса, входы которого связаны с блоком задания ординаты, определяющей положение границы поворота стрелы в сторону бокового откоса.
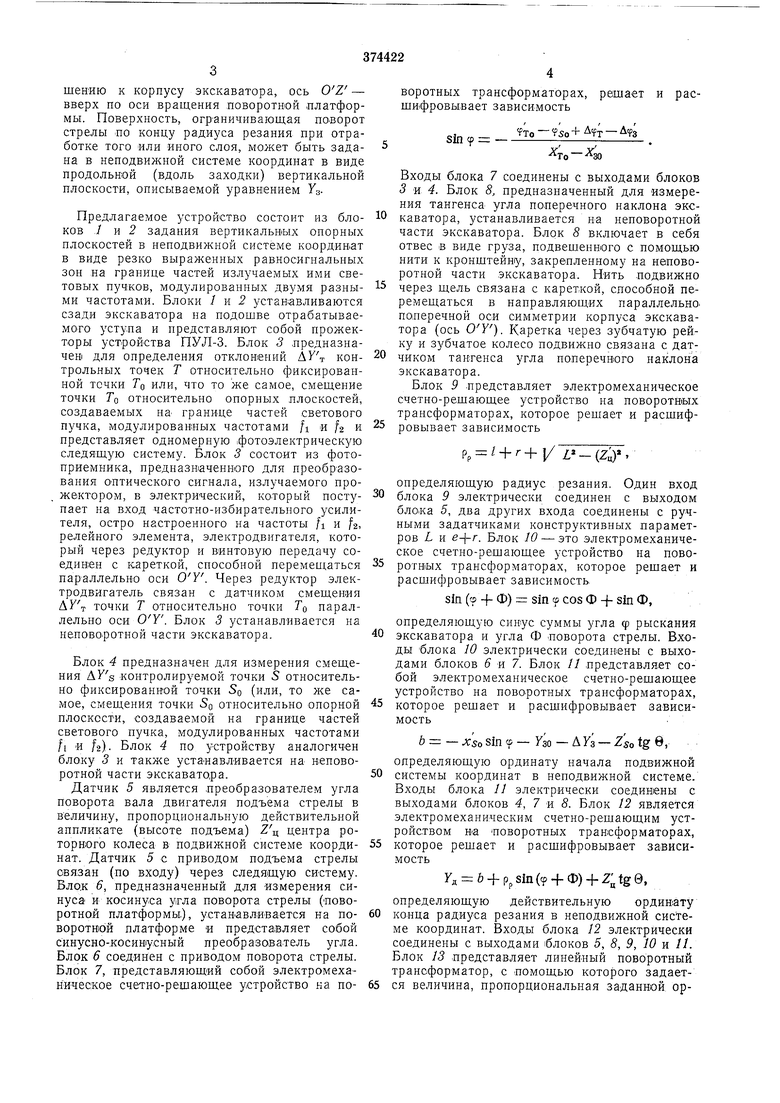
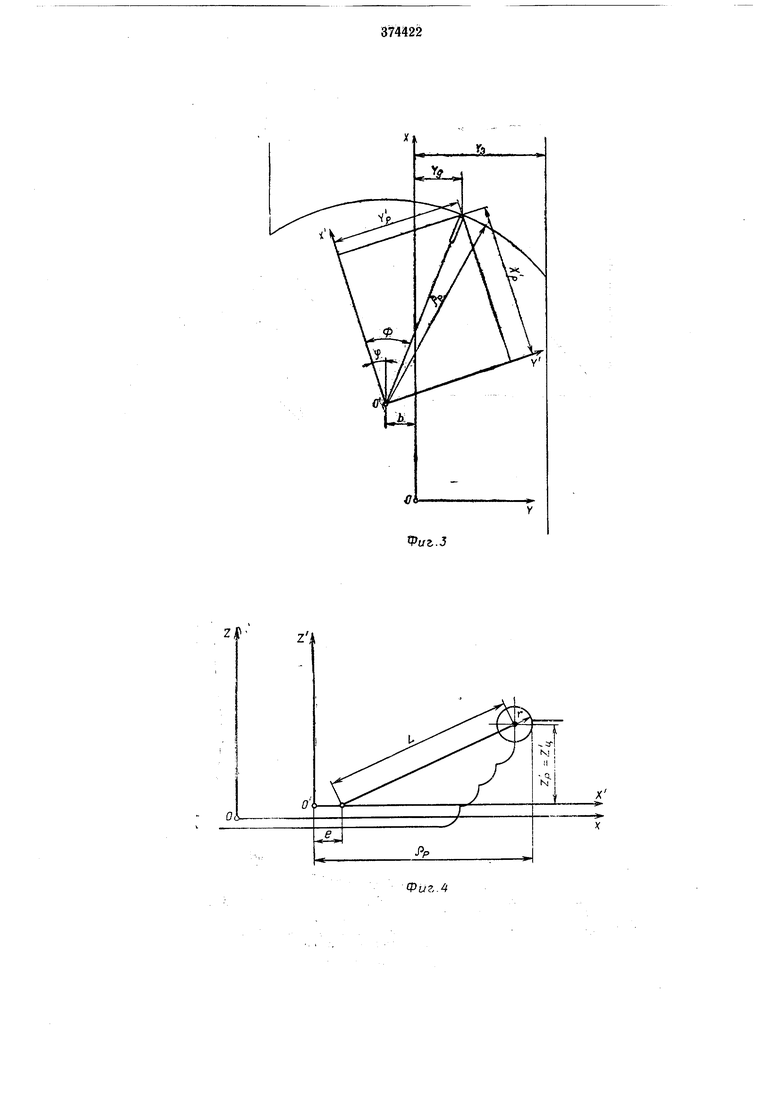
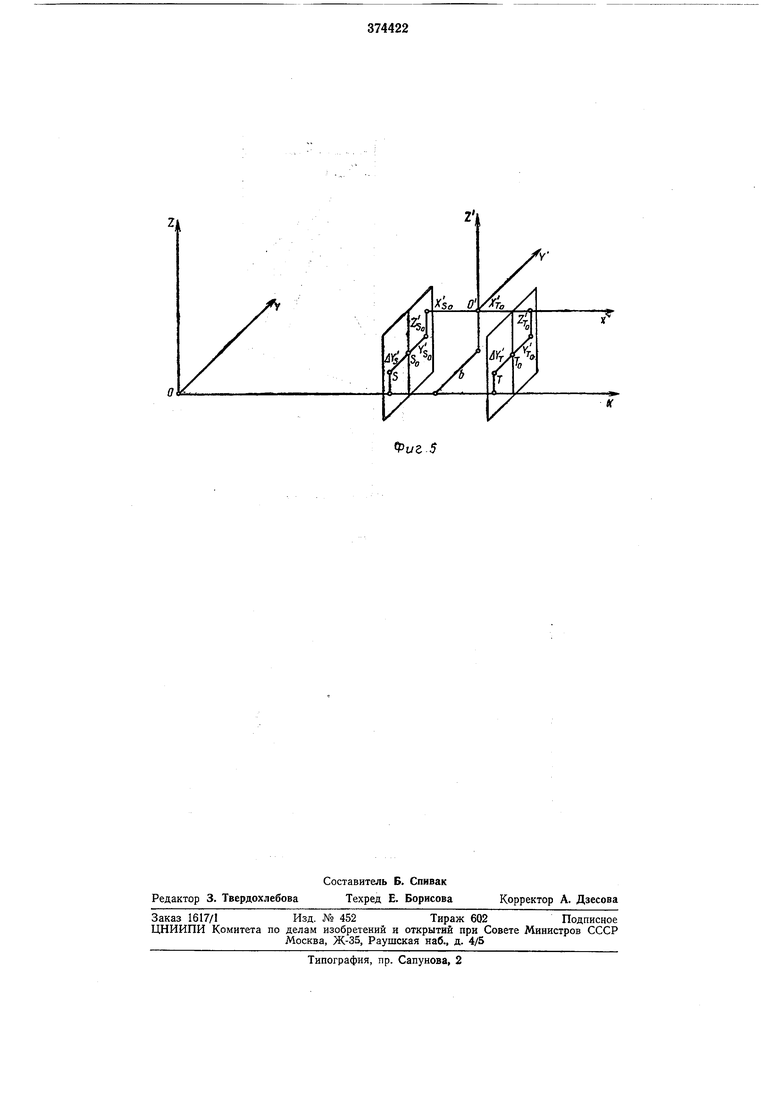
На фиг. 1 изображена блок-схема предлагае.мого устройства; на фиг. 2 - схема привязки устройства к роторному экскаватору; на фиг. 3 - подвижная и неподвижная системы координат в плане с привязкой к забою; на фиг. 4 - радиус резания, рр , связанный с параметрами г, е, L и Z-aj, ва фиг. 5 - подвижная система координат, связанная с неподвижной.
Для определения отклонения рабочего органа роторного экскаватора от бокового откоса в качестве неподвижной системы координат используется ортогональная система OXyz, ось ОХ которой ориентирована горизонтально Е направлении задавного курса движения экскаватора, ось ОУ - влево по горизонтали от направления оси ОХ .и ось OZ- вертикально вверх.
.Подвижная система коОрдинат OXyZ также ортогональная и ориентирована следующим образом: оси О Х и ОУ - параллельно плоскости поворотного круга экскаватора соответственно вперед и влево по отнюшевию к корпусу экскаватора, ось OZ - вверх по оси вращения поворотной платформы. Поверхность, огр-аничивающая поворот стрелы ло концу радиуса резания при отработке того или иного слоя, может быть задана в неподвижной системе координат в виде продольной (вдоль заходки) вертикальной плоскости, описываемой уравнением УЗПредлагаемое устройство состоит из блоков ,/ и 2 задания вертикальных опорных плоскостей в неподвижной системе координат в виде резко выраженных равносигнальных ЗОИ на границе частей излучаемых ими световых пучков, модулированных двумя разными частотами. Блоки / и 2 устанавливаются сзади экскаватора на подошве отрабатываемого уступа и представляют собой прожекторы устройства ПУЛ-3. Блок 3 -предназначен для определения отклонений АУт контрольных точек Т относительно фиксированиой точки Го или, что то же самое, смещение точки Го относительно опорных плоскостей, создаваемых иа границе частей светового пучка, модулированных частотами fi и /2 и представляет одномерную фотоэлектрическую следящую систему. Блок 3 состоит из фотоприемника, предназначенного для преобразования Оптического сигнала, излучаемого прожектором, в электрический, который поступает на вход частотно-избирательного усилителя, остро настроенного на частоты fi и fa, релейного элемента, электродвигателя, который через редуктор и винтовую передачу соединен с кареткой, способной перемещаться параллельно оси ОУ. Через редуктор электродвигатель связан с датчиком смещения ДУт точки Г относительно точки Го параллельно оси ОУ. Блок 3 устанавливается на неповОротной части экскаватора. Блок 4 предназначен для измерения смещения контролируемой точки S относительно фиксированной точки So (или, то же самое, смещения точки 5о относительно опорной плоскости, создаваемой на границе частей светового пучка, модулированных частотами /1 и /2). Блок 4 по устройству аналогичен блоку 5 и также устанавливается на неповоротной части экскаватора. Датчик 5 является .преобразователем угла поворота вала двигателя подъема стрелы в величину, пропорциональную действительной аппликате (высоте подъема) 2ц центра роторного колеса в подвижной системе координат. Датчик 5 с приводом подъема стрелы связан (по входу) через следящую систему. БЛО.К 6, предназначенный для измерения синуса и косинуса угла поворота стрелы (поворотной платформы), устанавливается на поворотной платформе и представляет собой синусно-косинусный преобразователь угла. Блок 6 соединен с приводом поворота стрелы. Блок 7, представляющий собой электромеханическое счетно-решающее устройство на поворотных трансформаторах, решает и расщифровывает зависимость 81п р - То- 5о+АТт-Д Р; - Входы блока 7 соединены с выходами блоков 3 и 4. Блок 8, предназначенный для измерения тангенса угла поперечного наклона экскаватора, устанавливается на неповоротной части экскаватора. Блок 8 включает в себя отвес в виде груза, подвешенного с помощью нити к кронштейну, закрепленному на неноворотной части экскаватора. Нить подвижно через щель связана с кареткой, способной перемещаться в направляющих параллельно пО|Перечной оси симметрии корпуса экскаватора (ось ОУ). Каретка через зубчатую рейку и зубчатое колесо подвижно связана с датчиком тангенса угла поперечного наклона экскаватора. Блок 9 .представляет электромеханическое счетно-решающее устройство на поворотных трансформаторах, которое решает и расшифровывает зависимость P, i + i(z), определяющую радиус резания. Один вход блока 9 электрически соединен с выходом бло1ка 5, два других входа соединены с ручными задатчиками конструктивных параметров L и e-j-r. Блок 10 - это электромеханическое счетно-решающее устройство на поворотных трансформаторах, которое решает и расщифровывает зависимость sin (9 + Ф) sin tp cos Ф + sin Ф, определяющую синус суммы угла ф рыскания экскаватора и угла Ф поворота стрелы. Входы блока 10 электрически соединены с выходами блоков 6 и 7. Блок // представляет собой электромеханическое счетно-рещающее устройство на поворотных трансформаторах, которое решает и расшифровывает зависимостьЬ - xso sin р - УЗО - А УЗ - Zso tg О, определяющую ординату начала подвижной системы координат в неподвижной системе. Входы блока 11 электрически соединены с выходами блоков 4, 7 и 8. Блок 12 является электромеханическим счетно-решающим устройством на поворотных трансформаторах, которое решает и расшифровывает зависимость + (-Ф) + Z„tg0, определяющую действительную ординату конца радиуса резания в неподвижной системе координат. Входы блока 12 электрически соединены с выходами блоков 5, 8, 9, 10 и //. Блок 13 представляет линейный поворотный трансформатор, с помощью которого задается величина, пропорциональная заданной ординате «овца радиуса резания в неподвижной системе координат. Блок 14, определяющий велИчину отклонения рабочего органа от заданной поверхности бокового откоса, представляет собой алгебраический сумматор сигналов, поступающих на его входы от блоков 12 и 13.
Перед началом обработки заходки прожекторы (блоки / и 5) устанавливаются так, чтобы создаваемые ими вертикальные опорные плоскости в виде равносигнальных зон1 совпадали с осью ОХ неподвижной системы координат, были Параллельны траектории движения экскаватора и проходили через рабочие диапазоны зон перемещения фотоприемников блоков 3 W 4. В блок 13 вводится сигнал, пропорциональный величине Y, - заданной ординате конца радиуса резания в неподвижной системе координат. Величины, пропорциональные конструктивным параметрам L и вводятся в блок 9 при первоначальной настройке устройства . После этого предлагаемое устройство вводится в действие.
Ори наклоне экскаватора и отклонении его от заданной траектории происходит следующее. В блоках 3 yi 4 фотоприемники смещаются относительно Н1улевого положения, в результате чего варущается равенство количества энергии, модулированных частотами fi и fz, f3 и f4 и попадающих на фоточувствительные элементы фотоприемников. В зависимости от преобладания на фоточувствительных элементах той или иной частоты (fi или fa, fs или f4), частотно-избирательные усилители, куда поступают сигналы от фотоприемников, через релейные элементы включают электродвигатели в направлении, необходимом для восстановления состояния равновесия фотоэлектрических следящих систем.
Электродвигатели через редукторы и винтовые передачи перемещают параллельно оси ОУ каретки до совмещения фотоприемников с опорными плоскостями, создаваемыми соответственно прожекторами (блоками / и 2).
Электродвигатели через редукторы поворачивают датчики в новое положение, что вызывает появление на их выходах сигналов, пропорциональных смещениям ДУт и ДУп фотоцриемников параллельно оси ОТ относительно соответствующих опорных плоскоетей.
В блоке 8 под действием груза нить смещается относительно нулевого положения и передвигает по направляющим параллельно оси ОУ каретку, которая через реечную передачу поворачивает датчик, что вызывает на выходе появление сигнала, пропорционального тангенсу угла поперечного наклона экскаватора (tg в). Сигналы из блоков 3 -я 4 поступают на вход блока 7, на выходе которого
появляется сигнал, пропорциональный величине sin ф. Сигнал из блока 5 поступает на вход блока 9, сигналы нз блоков 6 и 7 - на входы блока 10, а сигналы из блоков 7 и 8- на входы блока П.
На входах блоков 9, 10 и // появляются сигналы, пропорциональные величинам соответственно РР (ф+Ф) и 6, которые поступают на входы блока 12. Па входы блока 12 поступают также сигналы из датчика 5 и блока 8. Па выходе блока 12 появляется сигнал, пропорциональный величине Уд (действительная ордината конца радиуса резания в неподвижной системе коордиват).
В блоке 14 происходит суммирование сигналов, поступивших на его входы из блоков 12 и 13, в результате чего на выходе блока 14 появляется сигнал, пропопциональный величине отклонения рабочего органа от заданной поверхности бокового откоса. Устранение этого отклонения с помощью ручного или автоматического управления приводом поворота стрелы 15 и приводом подъема стрелы 16 позволяет отрабатывать заданную поверхность бокового откоса с учетом смещения экскаватора в пространстве забоя.
Предмет изобретения
Устройство для определения отклонения рабочего органа роторного экскаватора от поверхности бокового откоса, включающее блоки задания вертикальных опорных плоскостей в неподвижной системе координат, подключенные к блокам определения отклонений контрольных точек относительно опорных плоскостей, датчик определения высоты подъема центра роторного колеса в подвижной системе координат и блоки определения углов поворота роторной стрелы, рыскания и поперечного наклона кор.пуса экскаватора, отличающееся тем, что, с целью обеспечения автоматического контроля величины отклонения рабочего органа, устройство выполнено с блоком определения радиуса резания, вход которого соединен с выходом датчика определения высоты подъема центра роторного колеса и с блоком определения синуса суммы углов рыскания и поворота стрелы, входы которого соединены с выходами блоков опреде ления углов поворота роторной стрелы и рыскания корпуса экскаватора, блоком определения действительной ординаты конца радиуса резания, соединенного с блоком определения отклонения рабочего оргава от заданной поверхности бокового откоса, входы которого связаны с блоком задания ординаты, определяющей положение границы поворота стрелы в сторону бокового откоса.
ELIJ
.ц).
flTe,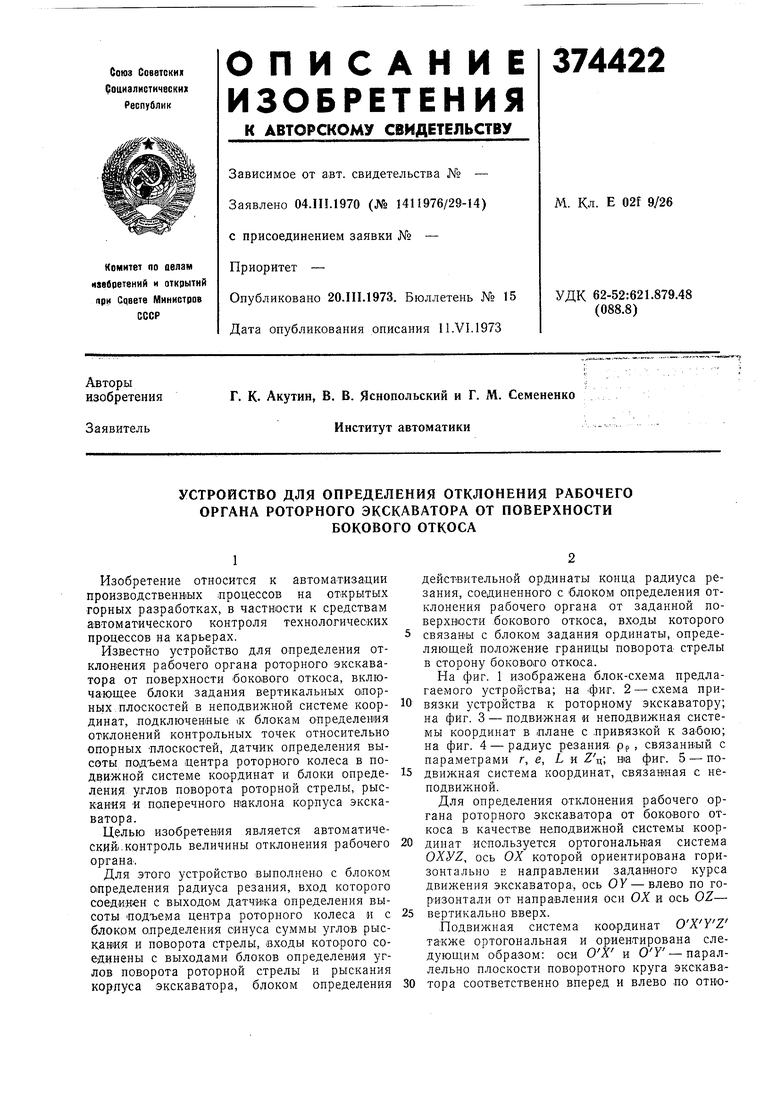
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РАБОЧЕГО | 1972 |
|
SU351982A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ КАРЬЕРНОГО ЭКСКАВАТОРА В ПРОСТРАНСТВЕ | 1972 |
|
SU336400A1 |
| Устройство для автоматического управления поворотом роторной стрелы экскаватора | 1980 |
|
SU899761A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ РОТОРНЫМ ЭКСКАВАТОРОМ | 1973 |
|
SU386075A1 |
| Устройство для управления роторным экскаватором при планировке рабочей площадки | 1981 |
|
SU1040051A1 |
| Способ контроля угла откоса при использовании драглайна | 1983 |
|
SU1162904A1 |
| Способ контроля положения ковша экскаватора-драглайна | 1989 |
|
SU1795010A2 |
| Способ управления разгрузкой ковша экскаватора-драглайна | 1987 |
|
SU1502723A1 |
| Рабочее оборудование экскаватора | 1986 |
|
SU1435718A1 |
| Устройство программного управления роторным экскаватором | 1979 |
|
SU870596A1 |
4)4
if
/ЗУ
5
Г2
г:
Фиг.Л
