Изобретение относится к области приборостроения, а именно к устройствам для определения курса подвижных объектов.
Известна курсовая система [1], содержащая установленную в основании гироскопическую систему с гироскопом, вектор кинетического момента ротора которого расположен в горизонтальной плоскости, следящую систему стабилизации курсовой оси с первым усилителем и первым двигателем, следящую систему стабилизации горизонтальной оси с вторым усилителем и вторым двигателем, устройство горизонтальной коррекции с жидкостным маятниковым датчиком, устройство магнитной коррекции курса с индукционным датчиком.
Наиболее близкой по технической сущности является курсовая система [2], содержащая установленную в основании гироскопическую систему с динамически настраиваемым гироскопом (ДНГ), следящую систему стабилизации курсовой оси, в которой первый датчик угла ДНГ подключен к входу первого усилителя, выход которого предназначен для подключения обмотки управления ротора первого моментного двигателя постоянного тока, установленного на курсовой оси гироскопической системы, следящую систему стабилизации горизонтальной оси, в которой второй датчик угла ДНГ подключен к входу второго усилителя, выход которого предназначен для подключения обмотки управления ротора второго моментного двигателя постоянного тока, установленного на горизонтальной оси гироскопической системы, устройство магнитной коррекции курса, в котором выходы индукционного датчика подсоединены к обмоткам статора установленного по курсовой оси гироскопической системы первого синусно-косинусного вращающегося трансформатора (СКВТ), выход ротора которого подсоединен к входу третьего усилителя, а выход третьего усилителя предназначен для подключения обмотки ротора первого датчика момента ДНГ, устройство горизонтальной коррекции, в котором выходы жидкостного маятникового датчика (ЖМД) подсоединены ко входу преобразователя сигнала ЖМД, а выход преобразователя сигнала ЖМД предназначен для подключения обмотки ротора второго датчика момента ДНГ, второй СКВТ по горизонтальной оси гироскопической системы, третий СКВТ по курсовой оси гироскопической системы, первое пороговое устройство, нагрузочный резистор.
Недостатком такой курсовой системы является ограничение угловых перемещений подвижного объекта вследствие возможного отказа ДНГ из-за того, что его ротор окажется на упорах.
Техническим результатом изобретения является расширение функциональных возможностей курсовой системы.
Данный технический результат достигается в курсовой системе, содержащей установленную в основании гироскопическую систему с динамически настраиваемым гироскопом (ДНГ), следящую систему стабилизации курсовой оси, в которой первый датчик угла ДНГ подключен к входу первого усилителя, выход которого предназначен для подключения обмотки управления ротора первого моментного двигателя постоянного тока, установленного на курсовой оси гироскопической системы, следящую систему стабилизации горизонтальной оси, в которой второй датчик угла ДНГ подключен к входу второго усилителя, выход которого предназначен для подключения обмотки управления ротора второго моментного двигателя постоянного тока, установленного на горизонтальной оси гироскопической системы, устройство магнитной коррекции курса, в котором выходы индукционного датчика подсоединены к обмоткам статора установленного по курсовой оси гироскопической системы первого синусно-косинусного вращающегося трансформатора (СКВТ), выход ротора которого подсоединен к входу третьего усилителя, а выход третьего усилителя предназначен для подключения обмотки ротора первого датчика момента ДНГ, устройство горизонтальной коррекции, в котором выходы жидкостного маятникового датчика (ЖМД) подсоединены ко входу преобразователя сигнала ЖМД, а выход преобразователя сигнала ЖМД предназначен для подключения обмотки ротора второго датчика момента ДНГ, второй СКВТ по горизонтальной оси гироскопической системы, третий СКВТ по курсовой оси гироскопической системы, первое пороговое устройство, нагрузочный резистор, отличающейся тем, что введены второе пороговое устройство, RS-триггер, электромагнитное реле, устройство задержки, выход первого порогового устройства подсоединен к входу устройства задержки, выход которого подсоединен к R-входу RS-триггера, обмотка ротора второго СКВТ подсоединена к входу второго порогового устройства, выход которого подсоединен к S входу RS-триггера, к выходу RS-триггера подключено электромагнитное реле, выход первого усилителя подсоединен к размыкающему контакту первого размыкающего контакта электромагнитного реле и к замыкающему контакту первого переключающего контакта электромагнитного реле, к размыкающему контакту которого подключен выход третьего усилителя, подвижный контакт первого размыкающего контакта подсоединен к обмотке управления ротора первого моментного двигателя постоянного тока, подвижный контакт первого переключающего контакта подсоединен к обмотке ротора первого датчика момента ДНГ, выход второго усилителя подсоединен к размыкающему контакту второго размыкающего контакта электромагнитного реле и к замыкающему контакту второго переключающего контакта электромагнитного реле, размыкающий контакт которого соединен с выходом преобразователя сигнала ЖМД, подвижный контакт второго размыкающего контакта подсоединен к обмотке управления ротора второго моментного двигателя постоянного тока, подвижный контакт второго переключающего контакта подсоединен к первому выводу обмотки ротора второго датчика момента ДНГ, второй вывод которого подсоединен к нагрузочному резистору, точка соединения нагрузочного резистора с вторым выводом обмотки ротора второго датчика момента ДНГ подключена к входу первого порогового устройства.
При введении в курсовую систему RS-триггера, электромагнитного реле, второго порогового устройства, устройства задержки, подсоединении нагрузочного резистора к обмотке второго датчика момента ДНГ, подключении обмотки ротора второго СКВТ к входу второго порогового устройства, подключении точки соединения обмотки ротора второго датчика момента ДНГ с нагрузочным резистором к входу первого порогового устройства, подсоединении обмоток управления ротора первого и второго моментных двигателей постоянного тока и обмоток ротора первого и второго датчиков момента ДНГ к контактам электромагнитного реле достигается то, что при маневрах типа «бочка» или «мертвая петля» происходит переключение ДНГ в режим датчика угловой скорости, чем исключается перемещение ротора ДНГ до упоров.
В результате обеспечивается расширение функциональных возможностей курсовой системы за счет устранения ограничений угловых перемещений подвижного объекта.
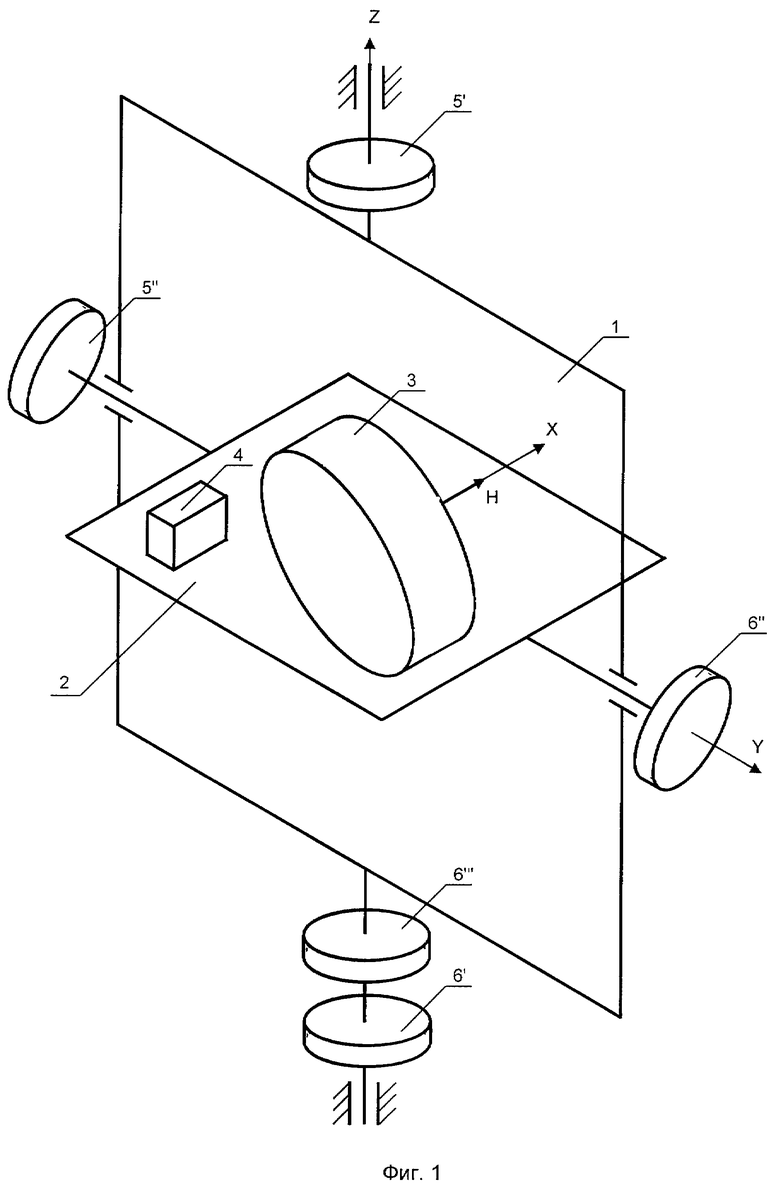
На фиг.1 представлена гироскопическая система курсовой системы, на фиг.2 - функциональная схема курсовой системы.
В гироскопической системе 1 (фиг.1), установленной в основании курсовой системы, ось Х направлена по продольной оси подвижного объекта, ось Y является горизонтальной осью, а ось Z - курсовой осью. На платформе 2 гироскопической системы 1 установлены ДНГ 3 и ЖМД 4 так, что вектор Н кинетического момента ДНГ 3 и измерительная ось ЖМД 4 параллельны оси Х и находятся в горизонтальной плоскости. Первая измерительная ось ДНГ 3 направлена по оси Z, по которой выполнены первый датчик угла и первый датчик момента ДНГ 3. Вторая измерительная ось ДНГ 3 направлена по оси Y, по которой выполнены второй датчик угла и второй датчик момента ДНГ 3. Первый моментный двигатель 5' постоянного тока установлен по курсовой оси Z, по которой также установлен первый СКВТ 6', второй моментный двигатель 5" постоянного тока установлен по горизонтальной оси Y, по которой также установлен второй СКВТ 6".
Третий СКВТ 6'" установлен по оси Z.
В курсовой системе (сриг.2) выход первого порогового устройства 7 подключен к входу устройства задержки 8, выход которого соединен с R входом RS-триггера 9, выход обмотки 10 ротора второго СКВТ 6" подсоединен к входу второго порогового устройства 11, выход которого подключен к S-входу RS-триггера 9, а к его выходу подключено электромагнитное реле 12. Выход первого датчика угла 13' ДНГ 3 подсоединен к входу первого усилителя 14', к выходу которого подключены размыкающий контакт первого размыкающего контакта К1 электромагнитного реле 12 и замыкающий контакт первого переключающего контакта К2.
К подвижному контакту первого размыкающего контакта К1 электромагнитного реле 12 подсоединена обмотка управления 15' ротора первого моментного двигателя 5' постоянного тока. Подвижный контакт первого переключающего контакта К2 подсоединен к обмотке 17' ротора первого датчика момента ДНГ 3.
Выход второго датчика угла 13" ДНГ 3 подсоединен к входу второго усилителя 14", к выходу которого подключены размыкающий контакт второго размыкающего контакта К3 электромагнитного реле 12 и замыкающий контакт второго переключающего контакта К4. К подвижному контакту второго размыкающего контакта К3 электромагнитного реле 12 подсоединена обмотка управления 15' ротора второго моментного двигателя 5" постоянного тока. Подвижный контакт второго переключающего контакта К4 подсоединен к первому выводу обмотки 17" ротора второго датчика момента ДНГ 3, второй вывод которого подсоединен к нагрузочному резистору R1. Точка соединения нагрузочного резистора R1 с вторым выводом обмотки 17" ротора второго датчика момента ДНГ 3 подключена к входу первого порогового устройства 7.
Выходы индукционного датчика 16 подсоединены к синусной и косинусной обмоткам статора первого СКВТ 6', обмотка ротора которого подключена к входу третьего усилителя 14"'. Выход третьего усилителя 14'" подключен к размыкающему контакту первого переключающего контакта К2 электромагнитного реле 12, к подвижному контакту переключающего контакта К2 подсоединена обмотка 17' ротора первого датчика момента ДНГ 3. Выход ЖМД 4 подключен к входу преобразователя 18 сигнала ЖМД 4, выход которого подсоединен к размыкающему контакту второго переключающего контакта К4 электромагнитного реле 12.
Индукционный датчик 16 содержит два взаимно перпендикулярных феррозонда с обмоткой возбуждения и сигнальной обмоткой.
С одного выхода индукционного датчика 16 следует сигнал переменного тока, пропорциональный синусу магнитного курса, с другого выхода - сигнал переменного тока, пропорциональный косинусу магнитного курса.
Преобразователь 18 сигнала ЖМД 4 выполнен в виде двух диодных выпрямителей разной полярности с двух разных выходных контактов ЖМД 4.
Устройство задержки 8 может быть выполнено в виде интегратора на операционном усилителе или в виде интегрирующей RC-цепочки.
Первое 7 и второе 11 пороговые устройства могут быть выполнены либо с внутренней уставкой, либо с внешней уставкой, представляющей подачу определенного напряжения на их входы.
В следящей системе стабилизации курсовой оси сигнал рассогласования с первого датчика угла 13' ДНГ 3 поступает в первый усилитель 14', где он демодулируется, усиливается и подается в обмотку управления 15' ротора первого моментного двигателя 5' постоянного тока. В результате гироскопическая система 1 разворачивается в положение, совпадающее с магнитным курсом подвижного объекта.
В следящей системе стабилизации горизонтальной оси сигнал рассогласования со второго датчика угла 13" ДНГ 3 поступает на вход второго усилителя 14", который подает напряжение в обмотку управления 15" ротора второго моментного двигателя 5" постоянного тока, который разворачивает платформу 2 в положение, обеспечивающее горизонтальное положение вектора Н кинетического момента ротора ДНГ 3.
С одного выхода индукционного датчика 16 напряжение переменного тока, пропорциональное синусу магнитного курса, подается на синусную обмотку статора первого СКВТ 6', со второго выхода индукционного датчика 16 в косинусную обмотку статора первого СКВТ 6' подается напряжение переменного тока, пропорциональное косинусу магнитного курса. В результате с обмотки ротора первого СКВТ 6' на вход третьего усилителя 14" поступает сигнал рассогласования между гирополукомпасным и магнитным курсами. После его усиления и преобразования в напряжение постоянного тока с выхода третьего усилителя 14"' напряжение постоянного тока подается в обмотку 17' ротора первого датчика момента ДНГ 3. В результате прецессии ротора ДНГ 3 сигнал рассогласования с выхода первого датчика угла 13' ДНГ 3 подается на вход первого усилителя 14', а с его выхода на обмотку управления 15' ротора первого моментного двигателя 5' постоянного тока, который разворачивает гироскопическую систему 1 в положение согласования гирополукомпасного и магнитного курсов. При этом с выхода синусной обмотки статора третьего СКВТ 6'" к потребителю поступает сигнал синуса гиромагнитного курса, а с выхода косинусной обмотки статора третьего СКВТ 6'" - сигнал косинуса гиромагнитного курса
При отклонении продольной оси Х от плоскости горизонта замыкается один из контактов ЖМД 4, его выходной сигнал переменного тока посредством преобразователя 18 сигнала ЖМД 4 преобразуется в напряжение постоянного тока, которое подается в обмотку 17" ротора второго датчика момента ДНГ 3.
Ротор ДНГ 3 прецессирует относительно оси Y, второй датчик угла 13" ДНГ 3 выдает сигнал во второй усилитель 14", выходным напряжением которого приводится в действие ротор второго моментного двигателя 5" постоянного тока. В результате платформа 2 разворачивается, приводя в плоскость горизонта продольную ось Х платформы 2 и обеспечивая горизонтальное положение вектора Н кинетического момента ротора ДНГ 3.
При выполнении подвижным объектом маневров типа «бочка» или «мертвая петля», которым соответствуют большие угловые перемещения подвижного объекта, ротор ДНГ 3 может отклониться до упоров, что нежелательно с точки зрения целостности упругих опор ДНГ 3.
Поэтому при достижении критического угла крена-тангажа, величина которого измеряется величиной выходного напряжения ротора второго СКВТ 6" и на которую настроено второе пороговое устройство 11, происходит срабатывание второго порогового устройства 11, сигнал срабатывания подается на вход S RS-триггера 9. RS-триггер 9 переводится в состояние, соответствующее подаче сигнала срабатывания электромагнитного реле 12. При срабатывании электромагнитного реле 12 его первый размыкающий контакт К1 отключает обмотку управления 15' ротора первого моментного двигателя 5' постоянного тока от выхода первого усилителя 14', первый переключающий контакт К2 отключает от выхода третьего усилителя 14'" обмотку 17' ротора первого датчика момента ДНГ 3 и подключает ее к выходу первого усилителя 14'. Второй размыкающий контакт К3 отключает обмотку управления 15" ротора второго моментного двигателя 5" постоянного тока от выхода второго усилителя 14", второй переключающий контакт К4 отключает от выхода преобразователя 18 сигнала ЖМД 4 обмотку 17" ротора второго датчика момента ДНГ 3 и подключает ее к выходу второго усилителя 14". При этом преобразование сигналов ДНГ 3 соответствует работе ДНГ 3 в режиме измерения угловых скоростей по двум его измерительным осям, когда сигнал первого датчика угла 13' с выхода первого усилителя 14' подается в обмотку 17' ротора первого датчика момента ДНГ 3, а сигнал второго датчика угла 13" с выхода второго усилителя 14" подается в обмотку 17" ротора второго датчика момента ДНГ 3. В результате ДНГ 3 работает в режиме слежения, и его ротор не отклоняется до упоров.
Таким образом обеспечивается повышение допустимых угловых перемещений подвижного объекта, что расширяет функциональные возможности курсовой системы.
Обратное переключение в нормальный режим курсовой системы осуществляется в равномерном прямолинейном движении на основе измерения угловой скорости относительно оси Y курсовой системы, определяемой величиной напряжения на нагрузочном резисторе R1. По окончании маневра с большими угловыми перемещениями происходит уменьшение угловой скорости и уменьшение напряжения на нагрузочном резисторе R1. При уменьшении напряжения на нагрузочном резисторе R1 до значения, соответствующего равномерному прямолинейному полету, происходит срабатывание первого порогового устройства 7, которое через устройство задержки 8 выдает напряжение, соответствующее логической единице на входе R RS-триггера 9. Электромагнитное реле 12 возвращается в исходное состояние, выход первого усилителя 14' подключается к обмотке управления 15' ротора первого моментного двигателя 5' постоянного тока, выход второго усилителя 14" подключается к обмотке управления 15" ротора второго моментного двигателя 5" постоянного тока, выход третьего усилителя 14'" подключается к обмотке 17' ротора первого датчика момента ДНГ 3, выход преобразователя 18 сигнала ЖМД 4 подключается к обмотке 17" ротора второго датчика момента ДНГ 3.
После этого происходит согласование магнитного курса и приведение в горизонтальное положение платформы 2.
Источники информации
1. Ю.А.Акиндеев, В.Г.Воробьев, А.А.Карчевский и др. Аппаратура измерения курса и вертикали воздушных судов гражданской авиации. М.: Машиностроение, 1979, с.110-158.
2. Патент РФ №2279636 С1, кл. G01C 23/00 (2006 01). Курсовая система, 2004 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| КУРСОВАЯ СИСТЕМА | 2004 |
|
RU2279636C1 |
| СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2186339C1 |
| САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2166733C1 |
| Способ регулировки динамически настраиваемого гироскопа в составе инерциальной навигационной системы | 2020 |
|
RU2741501C1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ | 2011 |
|
RU2457493C1 |
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2308681C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
| Гирополукомпас с аналитической азимутальной коррекцией | 2023 |
|
RU2799738C1 |
| БЕСПЛАТФОРМЕННЫЙ ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2007 |
|
RU2368871C2 |
| ИНЕРЦИАЛЬНАЯ СИСТЕМА | 2006 |
|
RU2326349C2 |
Изобретение относится к области приборостроения, а именно к устройствам для определения курса подвижных объектов. Технический результат - расширение функциональных возможностей. Для достижения данного результата курсовая система содержит гироскопическую систему с динамически настраиваемым гироскопом (ДНГ), следящую систему стабилизации курсовой оси с первым усилителем, следящую систему стабилизации горизонтальной оси с вторым усилителем, устройство магнитной коррекции курса с индукционным датчиком, первым синусно-косинусным трансформатором (СКВТ) и третьим усилителем, устройство горизонтальной коррекции с жидкостным маятниковым датчиком (ЖМД), вторым СКВТ по горизонтальной оси, третий СКВТ, моментные двигатели (МД), первое пороговое устройство (ПУ), нагрузочный резистор. В курсовую систему введены второе ПУ, RS-триггер, электромагнитное реле (ЭР), устройство задержки. 2 ил.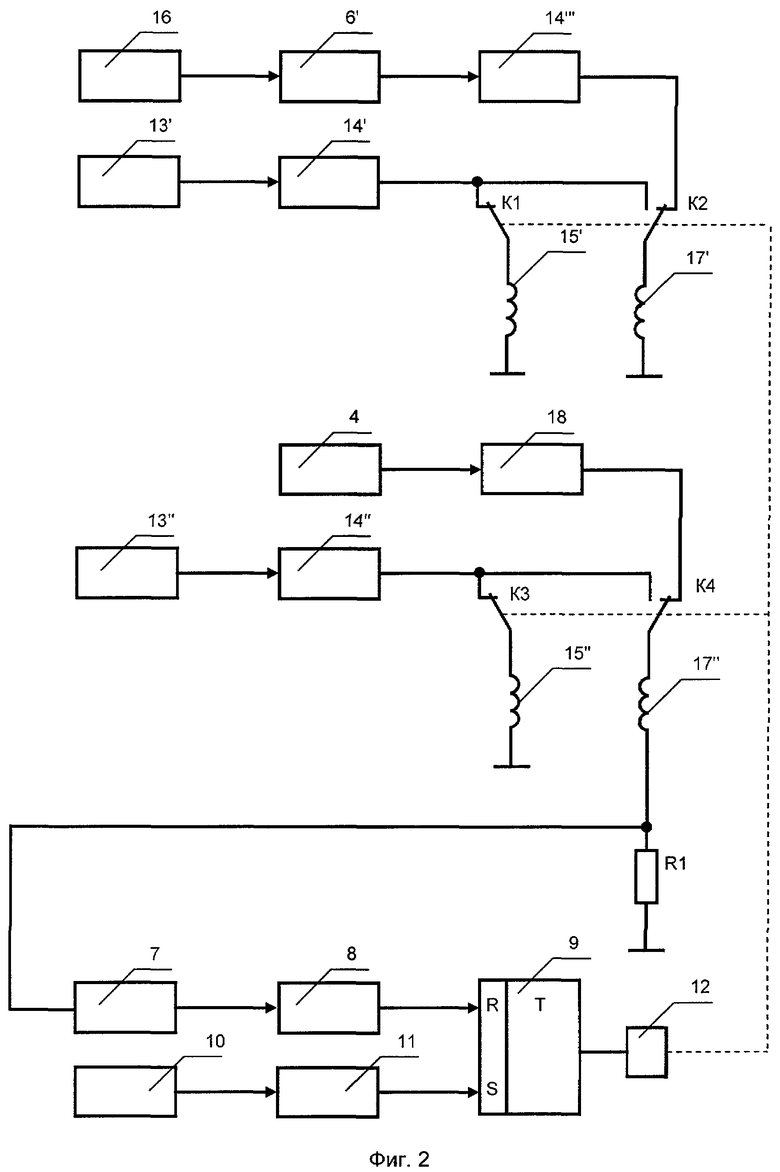
Курсовая система, содержащая установленную в основании гироскопическую систему с динамически настраиваемым гироскопом (ДНГ), следящую систему стабилизации курсовой оси, в которой первый датчик угла ДНГ подключен к входу первого усилителя, выход которого предназначен для подключения обмотки управления ротора первого моментного двигателя постоянного тока, установленного на курсовой оси гироскопической системы, следящую систему стабилизации горизонтальной оси, в которой второй датчик угла ДНГ подключен к входу второго усилителя, выход которого предназначен для подключения обмотки управления ротора второго моментного двигателя постоянного тока, установленного на горизонтальной оси гироскопической системы, устройство магнитной коррекции курса, в котором выходы индукционного датчика подсоединены к обмоткам статора, установленного по курсовой оси гироскопической системы первого синусно-косинусного вращающегося трансформатора (СКВТ), выход ротора которого подсоединен к входу третьего усилителя, а выход третьего усилителя предназначен для подключения обмотки ротора первого датчика момента ДНГ, устройство горизонтальной коррекции, в котором выходы жидкостного маятникового датчика (ЖМД) подсоединены ко входу преобразователя сигнала ЖМД, а выход преобразователя сигнала ЖМД предназначен для подключения обмотки ротора второго датчика момента ДНГ, второй СКВТ по горизонтальной оси гироскопической системы, третий СКВТ по курсовой оси гироскопической системы, первое пороговое устройство, нагрузочный резистор, отличающаяся тем, что введены второе пороговое устройство, RS-триггер, электромагнитное реле, устройство задержки, выход первого порогового устройства подсоединен к входу устройства задержки, выход которого подсоединен к R-входу RS-триггера, обмотка ротора второго СКВТ подсоединена к входу второго порогового устройства, выход которого подсоединен к S входу RS-триггера, к выходу RS-триггера подключено электромагнитное реле, выход первого усилителя подсоединен к размыкающему контакту первого размыкающего контакта электромагнитного реле и к замыкающему контакту первого переключающего контакта электромагнитного реле, к размыкающему контакту которого подсоединен выход третьего усилителя, подвижный контакт первого размыкающего контакта подсоединен к обмотке управления ротора первого моментного двигателя постоянного тока, подвижный контакт первого переключающего контакта подсоединен к обмотке ротора первого датчика момента ДНГ, выход второго усилителя подсоединен к размыкающему контакту второго размыкающего контакта электромагнитного реле и к замыкающему контакту второго переключающего контакта электромагнитного реле, размыкающий контакт которого соединен с выходом преобразователя сигнала ЖМД, подвижный контакт второго размыкающего контакта подсоединен к обмотке управления ротора второго моментного двигателя постоянного тока, подвижный контакт второго переключающего контакта подсоединен к первому выводу обмотки ротора второго датчика момента ДНГ, второй вывод которого подсоединен к нагрузочному резистору, точка соединения нагрузочного резистора с вторым выводом обмотки ротора второго датчика момента ДНГ подключена к входу первого порогового устройства.
| КУРСОВАЯ СИСТЕМА | 2004 |
|
RU2279636C1 |
| Аппаратура измерения курса и вертикали воздушных судов гражданской авиации | |||
| АКИНДЕЕВ Ю.А., ВОРОБЬЕВ В.Г., КАРЧЕВСКИЙ А.А | |||
| и др | |||
| - М.: Машиностроение, 1979, с.110-158 | |||
| Задняя бабка металлорежущего станка | 1985 |
|
SU1256862A1 |
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
| US 3630079 А, 28.12.1971. | |||

