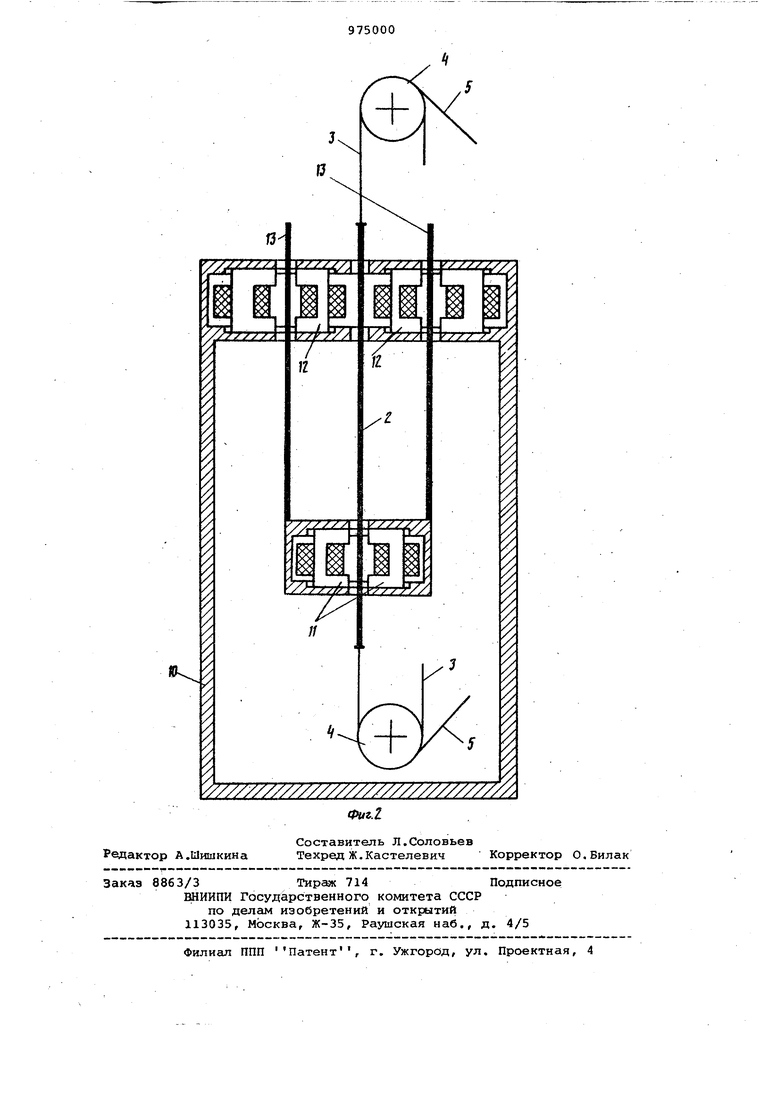
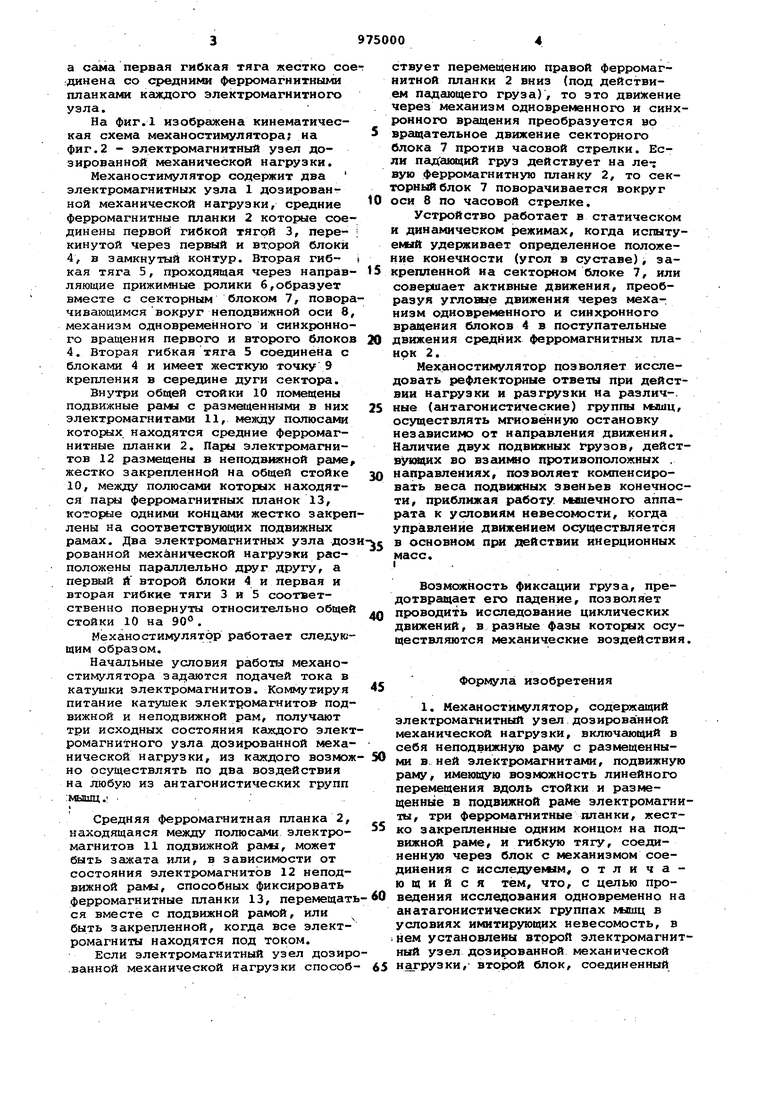
а сама первая гибкая тяга жестко сое гдинена со средними ферромагнитными планками каждого электромагнитного узла. На фиг.1 изображена кинематическая схема механостимулятора; на фиг.2 - электромагнитный узел дозированной механической нагрузки. Механостимулятор содержит два электромагнитных узла 1 дозированной механической нагрузки, средние ферромагнитные планки 2 которые соединены первой гибкой тягой 3, перекинутой через первый и второй блоки 4, в замкнутый контур. Вторая гибкая тяга 5, проходящая через направляющие прижилвдые ролики 6,образует вместе с секторным блоком 7, повора чивающимся вокруг неподвижной оси 8 механизм одновременного и синхронного вращения первого и второго блоков 4. Вторая гибкая тяга 5 соединена с блоками 4 и имеет жесткую точку 9 крепления в середине дуги сектора. Внутри общей стойки 10 помещены подвижные рамы с размшценными в них электромагнитами 11, между полюсами которых находятся средние ферромагнитные планки 2. Пары электромагнитов 12 разкшщены в неподвижной раме, жестко закрепленной на общей стойке 10, между полюсами которых находятся пары ферромагнитных планок 13, которые одними концами жестко закреп лены на соответствующих подвижных рамах. Два электромагнитных узла доз ррванной механической нагрузки расположены параллельно друг другу, а первый и второй блоки 4 и первая и вторая гибкие тяги 3 и 5 соответственно повернуты относительно общей стойки 10 на 90°. Механостимулятор работает следующим образом. Начальные условия работгл механостимулятора задгиотся подачей тока в катушки электромагнитов. Коммутируя питание катушек электромагнитов подвижной и неподвижной рам, получают три исходных состояния каж.цого элект ромагнитного узла дозированной механической нагрузки, из каждого возмож но осуществлять по два воздействия на любую из антагонистических групп .: .. Средняя ферромагнитная планка 2, находящаяся между полюсами электромагнитов 11 подвижной ракы, может быть зажата или, в зависимости от состояния электромагнитов 12 неподвижной рамы, способных фиксировать ферромагнитные планки 13, перемещат ся вместе с подвижной рамой, или быть закрепленной, когда все электромагниты находятся под током. Если электромагнитный узел дозир .ванной механической нагрузки способ ствует перемещению правой ферромагнитной планки 2 вниз (под действием падающего груза), то это движение через механизм одновременного и синхронного вращения преобразуется во вращательное движение секторного блока 7 против часовой стрелки. Если падхакяций груз действует на лет вую ферромагнитную планку 2, то секорный блок 7 поворачивается вокруг оси 8 по часовой стрелке. Устройство работает в статическом и динамическом режимах, когда испытуемый удерживает определенное положение конечности (угол в суставе), закрепленной на секторном блоке 7, или совершает активные движения, преобразуя углояяе движения через механизм одиовремениого и синхронного вращения блоков 4 в поступательные движения средних ферромагнитных планок 2. Механостимулятор позволяет исследовать рефлекторные ответы при действии нагрузки и разгрузки на различ-. ные (антагонистические) rpynrai кышц, осуществлять мгновенную остановку независимо от направления движения. Наличие двух подвижных 1 рузов, действукедих во взгшмно противоположных . направлениях, позволяет компенсировать веса подвижных звеньев конечности, приближая работу, мышечного аппарата к условиям невесомости, когда управление движением осуществляется в основном при действии инерционных Возможность фиксации груза, предотвращает его падение, позволяет проводить исследование циклических движений, в разные фазы которых осуществляются механические воздействия. Формула изобретения 1. Механостимулятор, содержащий электромагнитный узел дозированной механической нагрузки, включающий в себя неподвижную раму с размещенными в. ней электромагнитами, подвижную раму, имеющую возможность линейного перемещения вдоль стойки и размещенные в подвижной раме электромагниты, три ферромагиитные планки, жестко закрепленные одиим концом на подвижной раме, и гибкую тягу, соединенную через блок с механизмом соединения с исследуемом, отличающийся тем, что, с целью проведения исследования одновременно на анатагонистических группах 1«1шц в условиях имитирующих невесомость, в нем установлены второй электромагнитный узел дозированной механической нагрузки, вто1Юй блок, соединенный
первой гибкой тягой с первым блоком, и механизм одновременного и синхронного вращения первого и второго влоков исследуемого..
2. Механостикулятор по п.1, о т личающийся тем, -что механизм одновременного и синхронного вращения первого и второго блоков выполнен в виде секторного блока и второй гибкой тяги,.жестко закреплен ной в середине дуги сектора и соединенной через направляющие прижимные ролики с первым и вторым блоками.
3.Неханостимулятор по п.1, отличающийся тем, что непод- вижная рама жестко закреплена на общей стойке.
4.Мехгщостимулятор по п.1, о тличающий ся тем, что первый и второй блоки соединены первой гибкой тягой, а Ссша первая гибкая тяга жестко соединена со средними ферромагнитными планк 1ми каждого электромагнитного узла.
Источники информации, принятые во внимание при зкспертизе
1. Авторское свидетельство СССР J 469457, кл. А 61 В 5/10, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ | 1984 |
|
SU1362241A1 |
| Механостимулятор | 1973 |
|
SU469457A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ЗАЩИТНОГО УСТРОЙСТВА СИСТЕМЫ ВЕНТИЛЯЦИИ | 2007 |
|
RU2353860C1 |
| Электромагнитное устройство для торможения уточной нити | 1988 |
|
SU1838475A3 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ ДВИГАТЕЛЬНОЙ АКТИВНОСТИ ПАЦИЕНТОВ С ПОВРЕЖДЕНИЕМ СПИННОГО И ГОЛОВНОГО МОЗГА | 2016 |
|
RU2639794C1 |
| Устройство для обработки проб сыпучих материалов (его варианты) | 1982 |
|
SU1074992A1 |
| Устройство для дозированной раздачи корма в клеточной батарее для птиц | 1982 |
|
SU1195960A2 |
| УСТРОЙСТВО ДЛЯ ПРОТИВОПОЖАРНОЙ ЗАЩИТЫ АВТОМОБИЛЯ | 2022 |
|
RU2790891C1 |
| Ремизоподъемная каретка | 1990 |
|
SU1816291A3 |
| ТРЕХПОЛЮСНЫЙ ВЫСОКОВОЛЬТНЫЙ ВАКУУМНЫЙ ВЫКЛЮЧАТЕЛЬ | 1999 |
|
RU2143149C1 |