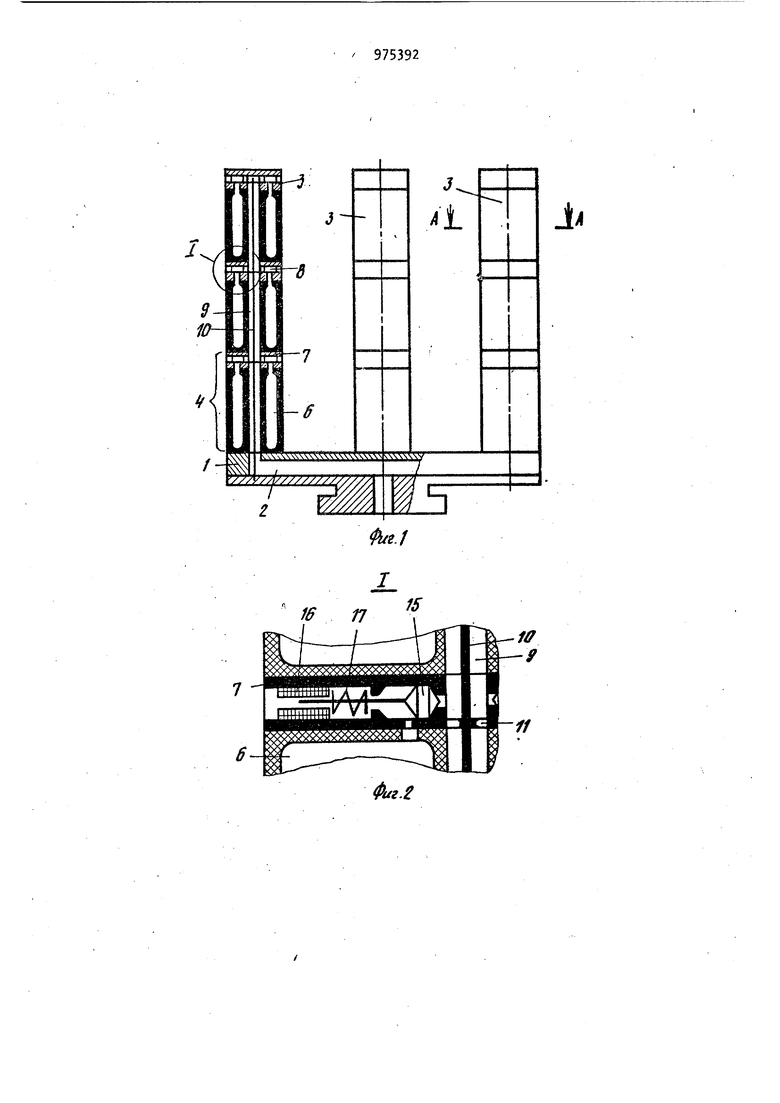
. (St) ЗАХВАТ 1 i: Изобретение относится к машино-/-Строению, а именно к промышленным роботам,и манипулпторам, и может быть использовано для различных технологических и погрузочно-разгрузочных работ. Известен эластичный палец, содержащий блок секций с гибким нерастяг гивающим элементом внутри и поперечными перегородками П. Известен также захват манипулятора, содержащий систему подачи сжатого Воздуха, корпус, пустотелые эластичные пальцы с гибким нерастяги вающим элементом внутри и изолироппн нымии полостями С2. .... Недостатком этих устройств я6ляется ограниченность технологических возможностей, это обусловлено те что каждый палец не имеет возможности выполнять движения, отличные и н зависимые от других пальцев Цель изобретения - расширение тех нологическИхХ возможностей захвата. Эта цель достигается тем, что каждая секция пальца снабжена индивидуальным средством подключения к системе подачи рабочей среда, выполненным в виде -электромагнита и подпр /жиненного вентиля, связанного с якорем электромагнита, причем средство подключения расположено внутри жесткой поперечной перегородки. На фиг. 1- изображен предлагаемый захват, общий вид; на фиг. 2 - узел 1 на. фиг. 1; на фиг. 3 разрез А-А на фиг. 1; на фиг. 4 - то же, с гофрированной трубкой; на фиг. 5 - пример работы захвата с деталью. Захват содержит корпус 1 с каналами 2 для подвода рабочей среды под давлением, например сжатого воздуха, и эластичные пальцы 3, состоя щие из нескольких секций - фаланг . Каждая секция k разделена эластичными продольными перегородками 5 на изолированные полости 6 и имеет жесткую поперечную перегородку 7. Каждая полость 6 при помощи индивидуального средства .подключения 8 может быть соединена либо с системой подвода сжатого воздуха через канал 9 либо атмосферой (для масла - со сливом), Между полостями по всей длине пальца расположен гибкий нерастягивавдщийся элемент 10, например тросик. Чтобы , исключить возможность удлинения одной секции за счет других, тросик 10 неподвих(но закреплен на каждой перегородке 7. Средства закреп ления 11 не препятствуют прохождению воздуха по каналу 9. Количество пальцев, секций и полостей в них может быть различным. Полости могут быть образованы гладкими или гофри-, рованными трубками 12 (фиг.). В этом случае канал 9 образуется также трубкой 13 Трубки 12 и 13 соединены по образую1цим крепежными элементами или клеем. Устройство средства подключения по лости к системе подачи рабочей сред 8 выполнено в виде вентиля 15 с прив дом от электромагнитаS16, которые располагаются внутри поперечной перегородкиi7. Вентиль 15 поджат пру жиной 17 так, что в исходном состоянии полость .6 соединена с атмосферой Захват работает следующим образом В исходном состоянии вое полости б секций Л отключены от системы подв да сжатого воздуха, пальцы 3 прямые. При подключении одной полости 6 секция t изогнется в сторону, противоположную этой полости. При подключении двух соседних полостей (при их общем числе больше двух) произойдет изгиб секции в направлении, протиаоп ложном перегородке между ними. Таким образом, при числе полостей, бол ше двух, секция имеет количество во можных направлений изгиба,,в два раз превышающее количество полостей. При подключении трех соседних полостей (при их общем числе, больше трех) произойдет изгиб секции в сторону, противоположную средней полости, как и при подключении ее одной, однако в этом случае изгиб будет меньше, а па лец жестче. Такие двигательные возможности имеет каждая секция пальца 3. Таким образом, сочетанием заполненных сжатым воздухом полостей 6 .каждой секции 4 и последовательностью их подключения (отключения) можно придать пальцам 3 требуемые для захвата предмета конфигурацию и движе 97 ;4 ния. Непосредственно в захвате после зажима предмета можно манипулировать им. Так, например, можно использовать два пальца захвата для удержания трубы 18 за торцы, а два других - для ее поворота вокруг своей оси (фиг. 5). Использование предлагаемого захвата в сравнении с известным обеспечивает увеличение технологических возможностей и универсальности захва та. Так, один,.четырехпальцевый захват может надежно захватить путем параллельного сближения пальцев листовые предметы за плоскости или длинномерные типа прутков и валов. При сближении пальцев в одну точку можно захватывать сферические недлинномерные предметы или щепотку мелких. Для захвата предметов сложной формы каждому пальцу придается своя требуемая конфигурация и направление движения. Добавлением или снятием секций можно изменять длину пальцев и тем самым переналаххивать захват на другой типоразмер захватываемых предме,тов, Предлагаемое устройство может выполнять не только функции захвата предмета, но и последующего манипулирования им. Формула изобретения Захват, содержащий корпус., систему подачи рабочей среды и эластичные пустотелые пальцы, имera.иe внутри гибкий нерастягивающийся элемент и изолированные полости-, а также жесткие поперечные перегородки, делящие полости на секции., отличающийся тем, что, с целью расширения технологических возможностей, каждая секция пальца сиаб :{ена индивидуальным средством подюшчения к системе подачи рабочей среды, выполненным в виде электромагнита и подпружиненного вентиля, связанного с якорем электромагнита, причем средство подключения расположено внутри поперечной перегородки. i Источники информации, принятые во внимание при экспертизе .1. Авторскоесвидетельство СССР N° 625079, кл. F16 Н (3/00, 1977. -2. Авторскоесвидетельство СССР W 737206, кл. в25 J 15/00, 198П.
J-i
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭНДОХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ С МЕНЯЮЩЕЙСЯ ОСЬЮ | 2005 |
|
RU2299036C2 |
| Пневмокамера шины | 1989 |
|
SU1643190A1 |
| УСТРОЙСТВО ДЛЯ УДАЛЕНИЯ ИНОРОДНОГО ТЕЛА ИЗ ПОЛОСТИ | 1990 |
|
RU2021767C1 |
| Мобильное средство защиты людей от лесного пожара | 2018 |
|
RU2683736C1 |
| Схват робота | 1986 |
|
SU1445949A1 |
| Адаптивный пневматический захват | 1986 |
|
SU1463471A1 |
| СПОСОБ ЗАЩИТЫ ПОЛИВНОГО ТРУБОПРОВОДА ОТ ЗАИЛЕНИЯ ПРИ ВНЕСЕНИИ ЖИДКИХ УДОБРЕНИЙ НА ОРОСИТЕЛЬНОЙ СИСТЕМЕ | 2013 |
|
RU2542246C1 |
| УСТРОЙСТВО ДЛЯ РАЗБРЫЗГИВАНИЯ ЖИДКОСТИ СЖАТЫМ ВОЗДУХОМ | 2007 |
|
RU2350074C1 |
| МИКРОСИСТЕМНЫЙ ЗАХВАТ | 2015 |
|
RU2598416C1 |
| ГИМНАСТИЧЕСКИЙ НАСТИЛ И СПОСОБ ЕГО СБОРКИ | 1992 |
|
RU2033218C1 |
16 П
15
6,
f2
Фи.
,.
