Изобретение относится к машиностроению и может быть использовано для захватывания предметов различной формы и манипулирования ими непосредственно в схвате.
Целью изобретения является расширение функциональных возможностей и повышение надежности.
На фиг. 1 изображен схват робота, об- ший вид; на фиг. 2 - вид А на фиг. 1.
Схват содержит корпус 1 с каналами 2 для подвода рабочей среды, например сжатого воздуха, зажимные губки 3, выполненные в виде герметичных эластичных камер, имеющих внутреннюю 4 и внешнюю 5 оболочку. Каждая из камер разделена эластичными продольными и поперечными перегородками 6 н-а секции с изолированными полостями 7. Последние заполнены электрореологической жидкостью. На перегородках 6 установлены электроды 8 и 9, выполненные в виде металлических гофрированных пластин или из токопроводящей резины и соединенные с источником электрического поля (не показан). Для предотвращения самопроизвольного растягивания секций на перегородках 6 установлены фиксаторы 10, имеющие Т-образную форму и выполненные из электроизоляционного материала. Привод губок выполнен в виде надувных баллонов с оболочкой 4.
Схват работает следующим образом.
В исходном состоянии полости баллонов губок 3 соединены с атмосферой. Для захватывания предмета схват вводят в рабочую зону. В баллоны губок начинают подавать рабочую среду под давлением (сжатый воздух). На определенные электроды 8 и 9 отдельных секций в соответствии с формой и особенностями захватываемого предмета подают напряжение от источника электрического поля, в результате в этих секциях изменяется вязкость электрореологической жидкости и изменяется структура и эластичность губок схвата в соответствии с известной заранее или определенной, например, при помощи дополнительных датчиков или системы технического зрения конфигурацией захватываемого предмета. При дальнейшем поступлении рабочей среды деформируются оболочки только тех секций, в которых электрореологическая жидкость не загустела. При этом фиксаторы 10, установленные на перегородках 6 в секциях, на электроды которых подается напряжение, оказываются жестко
связанными электрореологическои жидкостью и препятствуют растяжению перегородок этих секций при подаче рабочей среды. Электроды 8 и 9 изгибаются при деформации оболочек.
Таким образом, сочетанием секций с находящейся в различных состояниях электрореологической жидкостью, а также регулированием моментов подключения напряжения к разным секциям губке придают требуемую форму в соответствии с конфигурацией предмета. Для того, чтобы схват отпустил предмет, воздух стравливается из баллонов. Непосредственно в схвате после зажима предмета можно манипулировать им, плавно
изменяя эластичность отдельных частей губок и, подавая рабочую среду, тем самым изменяя размеры и форму губок, в результате чего деталь перемещается непосредственно в схвате.
В случае работы схвата в недетерминированной рабочей среде информация о размерах и форме деталей может быть получена, например, использованием системы технического зрения или тактильных датчиков.
Формула изобретения
1.Схват робота, содержащий корпус с зажимными губками, каждая из которых выполнена в виде эластичной камеры, заполненной электрореологической жидкостью, привод сжатия губок и источник электрического поля, отличающийся тем, что, с целью повышения надежности и расширения функциональных возможностей, привод сжатия губок выполнен в виде надувных баллонов, соединенных с источником рабочей среды, а каждая эластичная камера выполнена состоящей из секций с изолированными полостями, разделенными эластичными перегородками, при этом каждая секция снабжена
фиксаторами и двумя гибкими электродами, соединенными с источником электрического поля.
2.Схват по п. 1, отличающийся тем, что фиксаторы выполнены Т-образной формы из
электроизоляционного материала и закреплены на эластичных перегородках.
3.Схват по п. 1, отличающийся тем, что электроды выполнены из гофрированных пластин.
6 ,S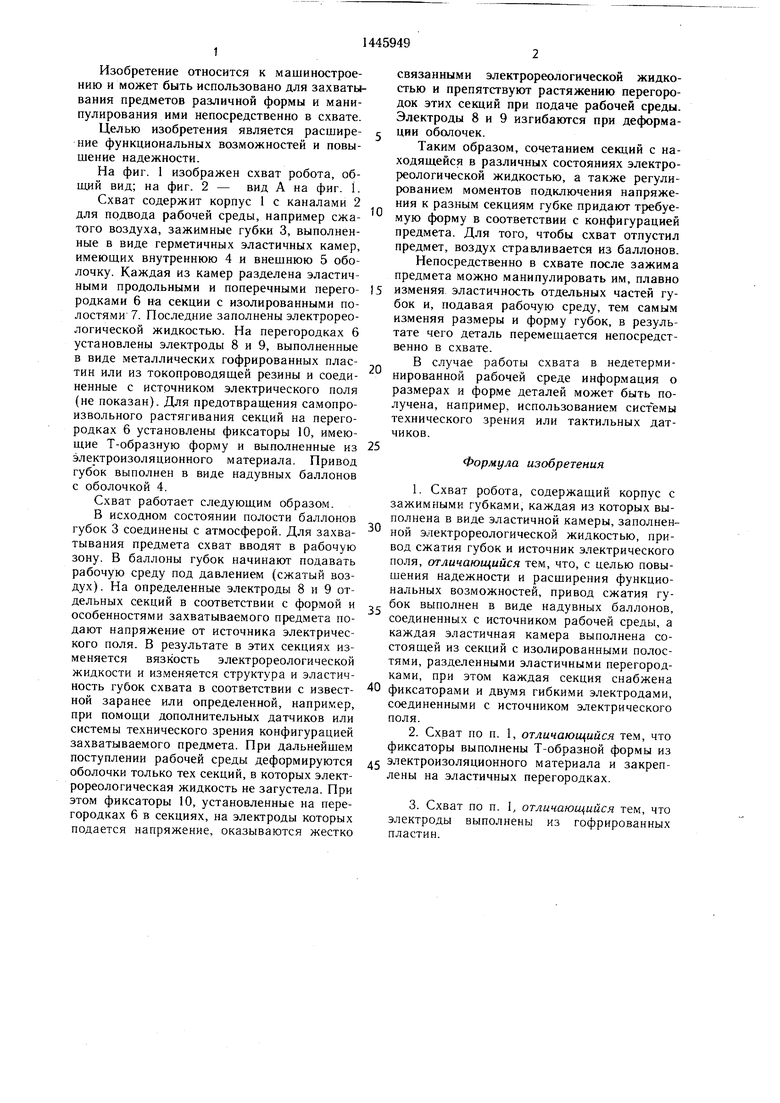
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1990 |
|
SU1798188A1 |
| СХВАТ МАНИПУЛЯТОРА | 1999 |
|
RU2147277C1 |
| Схват манипулятора | 1989 |
|
SU1689068A1 |
| Схват манипулятора | 1988 |
|
SU1576310A1 |
| Губка схвата манипулятора | 1990 |
|
SU1805032A1 |
| Схват манипулятора (его варианты) | 1983 |
|
SU1229035A1 |
| Губка схвата манипулятора | 1989 |
|
SU1798181A1 |
| Схват для хрупких деталей | 1984 |
|
SU1284827A1 |
| МИКРОСИСТЕМНЫЙ ЗАХВАТ | 2015 |
|
RU2598416C1 |
| Схват микроманипулятора | 1981 |
|
SU1009756A1 |

Изобретение относится к машиностроению и может быть использовано при захвате предметов различной формы и манипулирования ими непосредственно в схвате. Цель изобретения - расширение функциональных возможностей и повышение надежности. Для этого зажимные губки 3, заполненные электрореологической жидкостью, разделены на секции эластичными перегородками 6. На перегородках 6 закреплены Т-образные фиксаторы 10 и электроды 8 и 9 из гофрированных пластин. При захвате предмета рабочая среда под давлением подается по каналу 2 в баллон с оболочкой 4. На определенные электроды 8 и 9 отдельных секций подается напряжение от источника электрического поля. Оболочки 4 и 5 деформируются и принимают форму предмета, в результате происходит его надежный захват. Изменяя эластичность отдельных частей губок 3 и изменяя давление в баллоне, можно манипулировать зажатым предметом. 2 з.п. ф-лы, 2 ил. J. G Ф сл 4 4i сд со 4 СО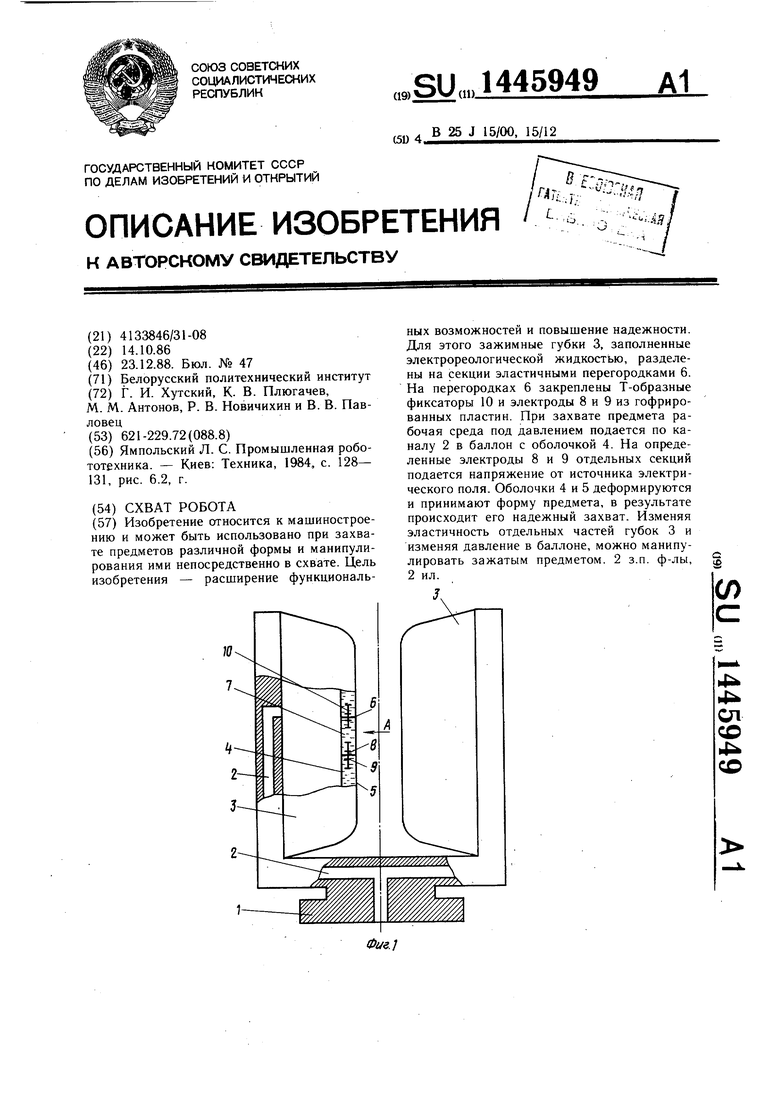
0i/S.Z
| Ямпольский Л | |||
| С | |||
| Промышленная робототехника | |||
| - Киев: Техника, 1984, с | |||
| Сепаратор-центрофуга с периодическим выпуском продуктов | 1922 |
|
SU128A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
