(54) МОСТОВОЕ УСТРОЙСТВО ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ РАБОТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Мостовое устройство для сельскохозяйственных работ | 1982 |
|
SU1083984A2 |
| Мостовое устройство для сельскохозяйственных работ | 1981 |
|
SU1064882A1 |
| Мостовое устройство для сельскохозяйственных работ | 1980 |
|
SU893150A1 |
| Мостовое устройство для сельскохозяйственных работ | 1981 |
|
SU1005692A1 |
| Мостовое устройство для сельскохозяй-СТВЕННыХ РАбОТ | 1979 |
|
SU852198A1 |
| Мостовое устройство для сельскохозяйственных работ | 1980 |
|
SU873899A1 |
| МОСТОУКЛАДЧИК | 1996 |
|
RU2102556C1 |
| Мостовой кран | 2023 |
|
RU2820482C1 |
| Мостовое устройство для сельскохозяйственных работ | 1979 |
|
SU791274A1 |
| Мостовое устройство для сельскохозяйственных работ | 1981 |
|
SU1044228A1 |

1
Изобретение относится к сельскому хозяйству.
Известно мостовое устройство для сельскохозяйственных работ, включающее установленное на основании посредством опор с ходовыми частями пролетное строение, на котором смонтировано технологическое, энергетическое и с помощью подвижных площадок рабочее оборудование 1.
Недостатком известного устройства является невозможность автоматизации установки рабочего оборудования в рабочий режим и режим хранения.
Цель изобретения - автоматизация установки рабочего оборудования в рабочий режим и режим хранения.
Поставленная цель достигается тем, что на основании установлена железобетонная опорная площадка по . длине пролетного строения с установленным вдоль нее рядами по типоразмерам рабочим оборудованием, в торцах каждого из которых установлены датчики координат, причем на опорах установлены блоки координат для взаимодействия с датчиками координат, а подвижные площадки снабжены электроуправляемыми захватами.
Кроме того, опорная площадка в зоне ходовых частей выполнена синусоидальной с длиной волны, равной межосевому расстоянию катков ходовых частей.
Подвижные площадки снабжены электроприводами для рабочего оборудования.
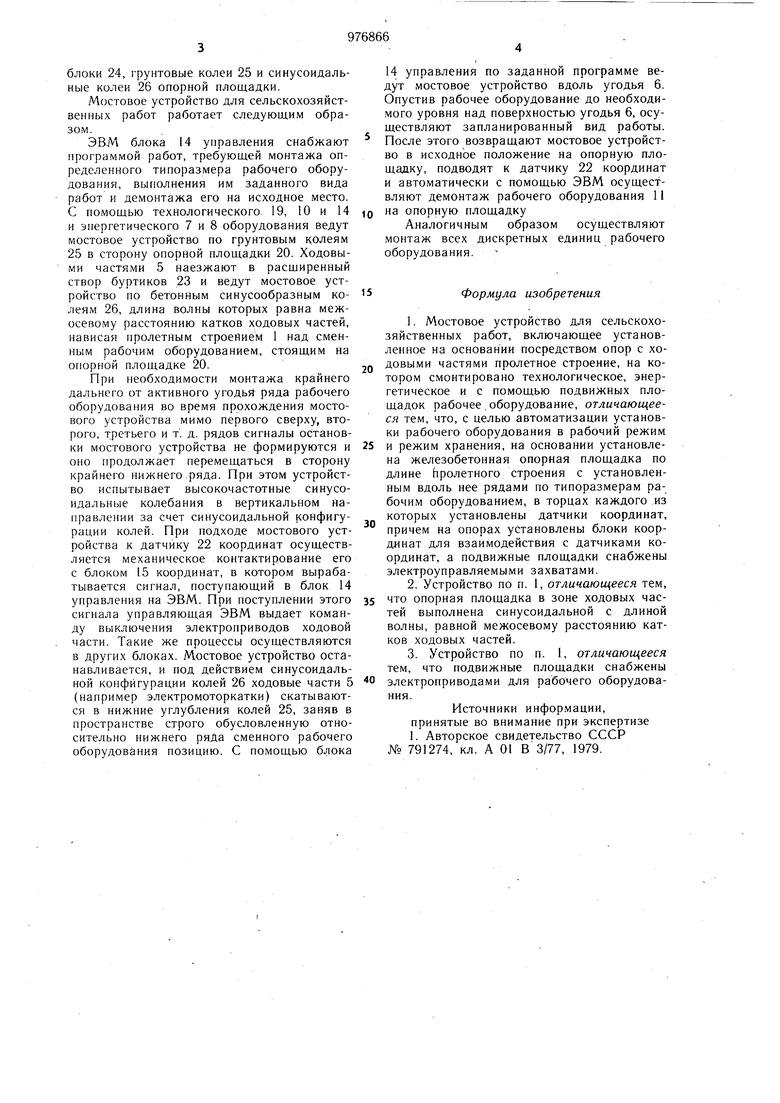
На фиг. 1 изображено мостовое устройство для сельскохозяйственных работ, вид спереди; на фиг. 2 - железобетонная опорная площадка, вид сверху; на фиг. 3 - разрез А-А на фиг. 2.
Мостовое устройство для сельскохозяйственных работ включает пролетное строение 1, кабину 2 управления, опоры 3, стойки 4, ходовые части 5 для перемещения вдоль 15 угодья 6, электрическое оборудование 7, токосъемники 8, технологическое оборудование 9, коммуникации 10, рабочее оборудование 11, подвижные площадки 12, погрузочноразгрузочные блоки 13, блок 14 управления, блоки 15 координат, электроуправляемые захваты 16, электрические разъемы 17, унифицированные электроприводы 18, блоки 19 перемеШ,ения площадок, опоряую площадку 20, зафиксированную с помощью свай 21, датчики 22 координат, буртики 23,
блоки 24, грунтовые колеи 25 и синусоидальные колеи 26 опорной площадки.
Мостовое устройство для сельскохозяйственных работ работает следующим образом.
ЭВМ блока 14 управления снабжают программой работ, требующей монтажа определенного типоразмера рабочего оборудования, выполнения им заданного вида работ и демонтажа его на исходное место. С помощью технологического- 19, 10 и 14 и энергетического 7 и 8 оборудования ведут мостовое устройство по грунтовым колеям 25 в сторону опорной площадки 20. Ходовыми частями 5 Наезжают в расщиренный створ буртиков 23 и ведут мостовое устройство по бетонным синусообразным колеям 26, длина волны которых равна межосевому расстоянию катков ходовых частей, нависая пролетным строением 1 над сменным рабочим оборудованием, стоящим на опорной площадке 20.
При необходимости монтажа крайнего дальнего от активного угодья ряда рабочего оборудования во время прохождения мостового устройства мимо первого сверху, второго, третьего и т , д. рядов сигналы оетановки мостового устройства не формируются и оно продолжает перемещаться в сторону крайнего нижнего ряда. При этом устройство испытывает высокочастотные синусоидальные колебания в вертикальном направлении за счет синусоидальной конфигурации колей. При подходе мостового устройства к датчику 22 координат осуществляется механическое контактирование его с блоком 15 координат, в котором вырабатывается сигнал, поступающий в блок 14 управления на ЭВМ. При поступлении этого сигнала управляющая ЭВМ выдает команду выключения электроприводов ходовой части. Такие же процессы осуществляются в других блоках. Мостовое устройство останавливается, и под действием синусоидальной конфигурации колей 26 ходовые части 5 (например электромоторкатки) скатываются в нижние углубления колей 25, заняв в пространстве строго обусловленную относительно нижнего ряда сменного рабочего оборудования позицию. С помощью блока
14 управления по заданной программе ведут мостовое устройство вдоль угодья 6. Опустив рабочее оборудование до необходимого уровня над поверхностью угодья 6, осуществляют запланированный вид работы.
После этого возвращают мостовое устройство в исходное положение на опорную площадку, подводят к датчику 22 координат и автоматически с помощью ЭВМ осуществляют демонтаж рабочего оборудования 1I
на опорную площадку
Аналогичным образом осуществляют монтаж всех дискретных единиц рабочего оборудования.
Формула изобретения
и режим хранения, на основании установлена железобетонная опорная площадка по длине Ьролетного строения с установленным вдоль нее рядами по типоразмерам рабочим оборудованием, в торцах каждого из которых установлены датчики координат, причем на опорах установлены блоки координат для взаимодействия с датчиками координат, а подвижные площадки снабжены электроуправляемыми захватами.
электроприводами для рабочего оборудования.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 791274, кл. А 01 В 3/77, 1979.
/ . /J /8 I Tti1-Г-Т-Г-ГТ T-r-ilT-r- -T II /I/ II I I и I I III I Ь1й1ШШЬи 1 lElA да8г9 Ж«9 Ж5« 5 «Я г« Жй 2г5 g // f /7 / /g v f
J ,ff
-/V
J fO лН I I N I I ilL Uolv
