(54) ЦЕНТРОБЕЖНЫЙ УДАРНЫЙ МЕХАНИЗМ
1
Изобретение относится к ударным механизмам ручных механизированных инструментов и может быть использовано в строительных работах и других, требующих высокой энергии единичного удара.
Известен ударный механизм, содержащий корпус, привод, маховик с продольным пазом и ударник, перемещающийся в пазу 1.
Недостатки известного ударного механизма - малые надежность и долговечность, связанные с высокими ударными нагрузками в паре маховик-ударник.
Наиболее близким к предлагаемому по технической х сущности и достигаемому результату является центробежный ударный механизм, содержащий привод, корпус, размещенные в нем маховик с диаметральным пазом, соединенный с приводом, ударник, размещенный в пазу маховика и выполненный в виде связанных между собой гибким элементом щарового бойка и противовеса, возвратнук) пружину ударника, синхронизирующий узел, управляющий узел и связанный с ним фиксатор 2. (ЕГО ВАРИАНТЫ)
Недостатком известного центробежного ударного механизма является передача высоких нагрузок на фиксатор, что ограничивает ударную мощность и снижает надежность механизма.
5Цель изобретения - повыщение ударной
мощности и надежности центробежного ударного механизма.
Указанная цель достигается в первом варианте выполнения тем, что центробеж,Q ный ударный механизм, содержащий привод, корпус, размещенные в нем маховик с диаметральным пазом, соединенный с приводом, ударник, размещенный в пазу маховика и выполненный в виде связанных между собой гибким элементом щарового бойка и противовеса, возвратную пружину ударника, синхронизирующий узел, управляющий узел и связанный с ним фиксатор, снабжен направляющей втулкой с радиальным отверстием, жестко связанной с противовесом и гибким элементом, который вы20полнен в виде трубы, и подпружиненным грузом цилиндрической формы с кольцевым пазом на наружной поверхности, взаимодействующим с фиксатором, размещенным в Направляющей втулке и гибком элементе
со смещением центра масс относительно оси маховика в сторону шарового бойка, причем груз может быть .выполнен в виде нескольких масс, связанных шарнирно.
Во втором варианте выполнения указанная цель достигается тем, что центробежНый ударный механизм, содержащий привод, корпус, размещенные в нем маховик с диаметральным пазом, соединенный с приводом, ударник, размещенный в пазу маховика и выполненный в виде связанных между собой гибким элементом в виде троса шарового бойка и противовеса, B03BpatHyro пружину ударника, синхронизирующий узел, управляющий узел и связанный с ним фиксатор, снабжен направляющим стержнем, жестко связанным с противовесом и гибКИМ элементом, и подпружиненным грузом, выполненным в виде кольца с кольцевым пазом или .упором на наружной поверхности, взаимодейстБук)щим с фиксатором и размещенным на направляющем стержне со смещением центра масс от оси маховика в сторону бойка, при этом направляющий стержень установлен параллельно диаметральному пазу.
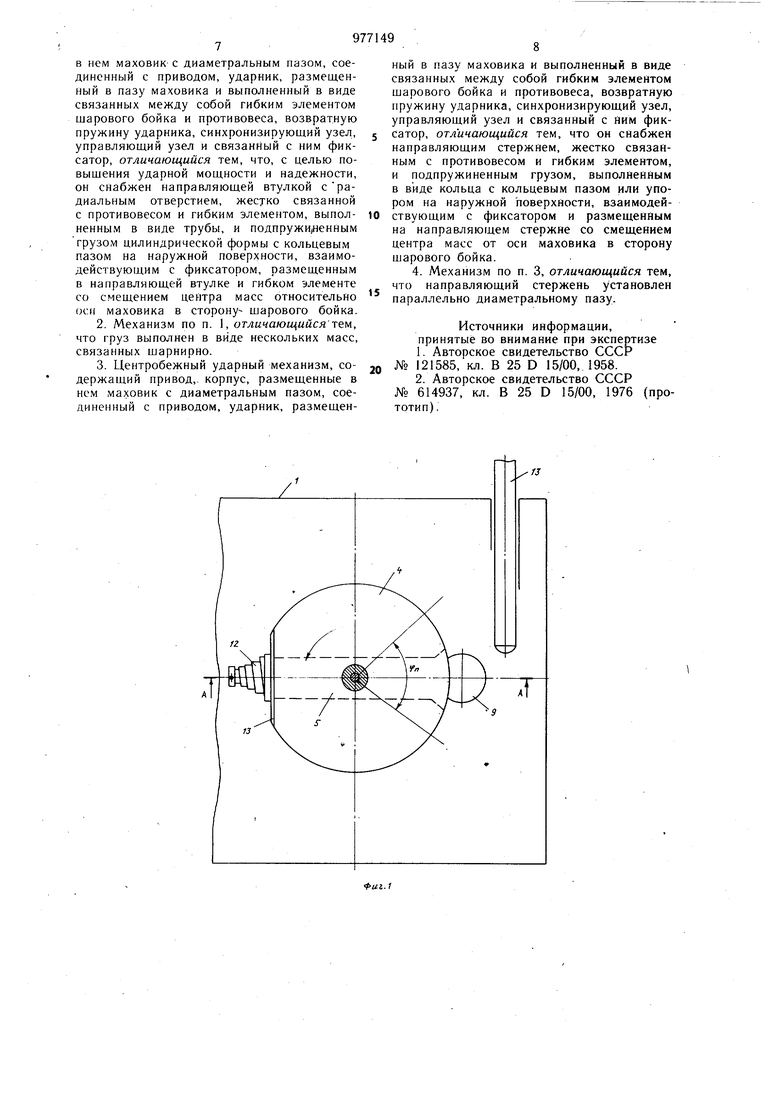
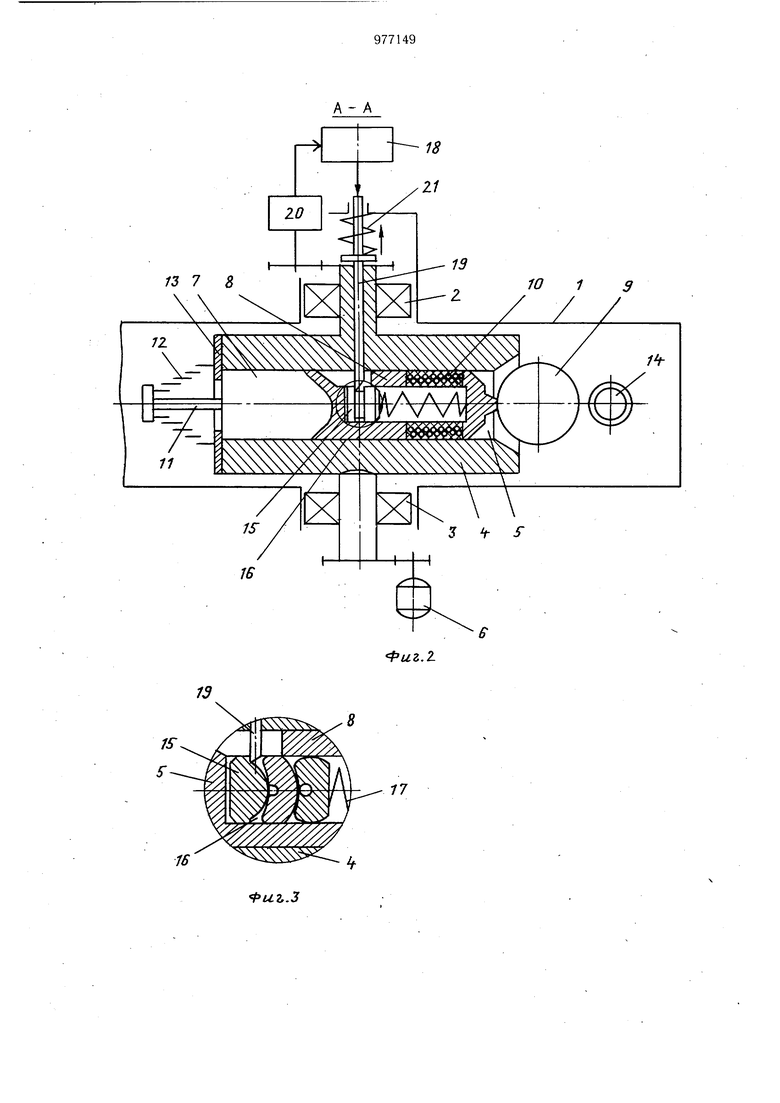
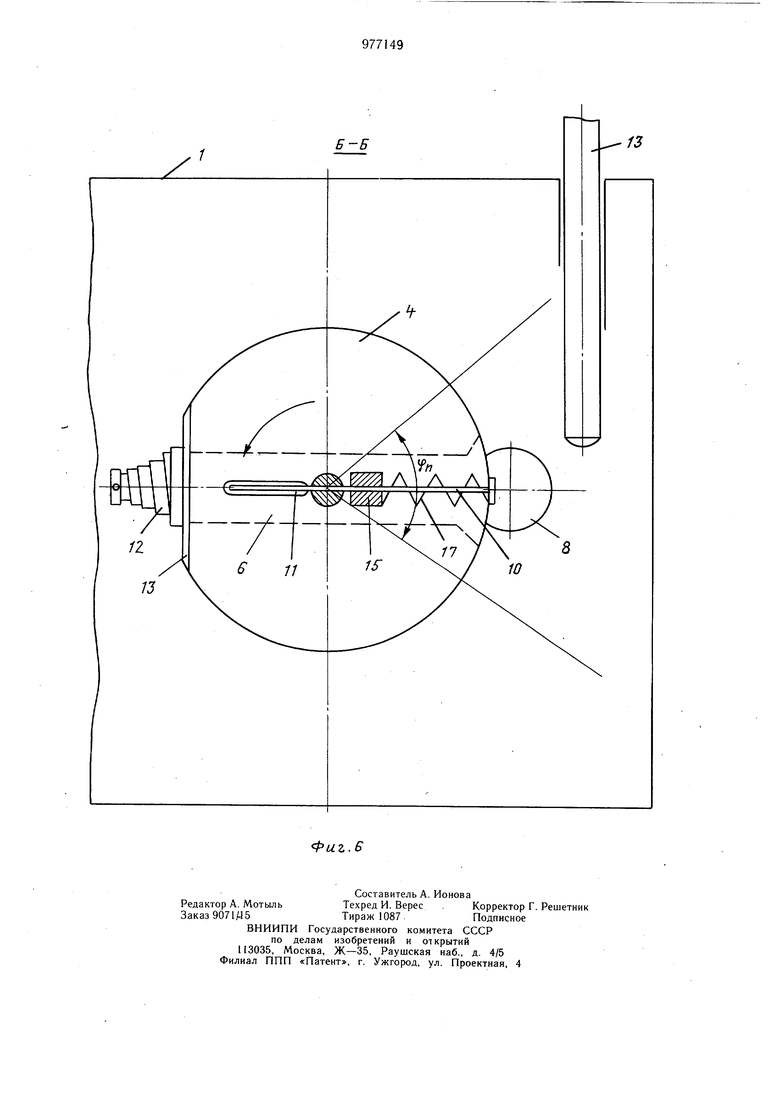
На фиг. 1 схематично представлена конструкция центробежного ударного механизма по первому варианту исполнения; на фиг. 2 - сечение А-А на фиг. 1; на фиг 3 - вариант выполнения груза; на фиг. 4 и 5 - конструкция центробежного ударного механизма по второму варианту исполнения; на фиг. 6 - сечение Б-Б на фиг. 4.
Центробежный ударный механизм в первом варианте вьпюлнения содержит корпус 1, в котором в подщипниковых узлах 2 и 3 размещен маховик 4 с диаметральным пазом 5, соединенный с приводом 6, где расположен ударник, выполненный в виде противовеса 7 с направляющей втулкой 8, щарового бойка 9, связанного с направляющей втулкой 8 гибким элементом 10 в виде трубы или элемента трубчатой формы, например двух пружин разного направления навивки, концентрично расположенных относительно друг друга и связанных между собой эластичным пОлимерным материалом.
Противовес 7 связан с маховиком 4 через шток 11 и пружину 12. Упоры 13 ограничивают смещение противовеса 7 влево. В корпусе 1 размещен волновод 14. В направляющей втулке 8 размещен груз 15 цилиндрической формы. На наружной поверхности которого имеется кольцевой паз 16. Груз 15 отжат влево пружиной 17, причем центр масс груза 15 смещен в сторону шарового бойка 9.
Управляющий узел 18 может быть любого типа, например, ручным, электромагнитным, гидравлическим и пр., для осевого смещения фиксатора 19, который проходит через маховик 4 и направляющую втулку 8 и взаимодействует с кольцевым пазом 16,
удерживая груз 15 при разгоне маховика 4.
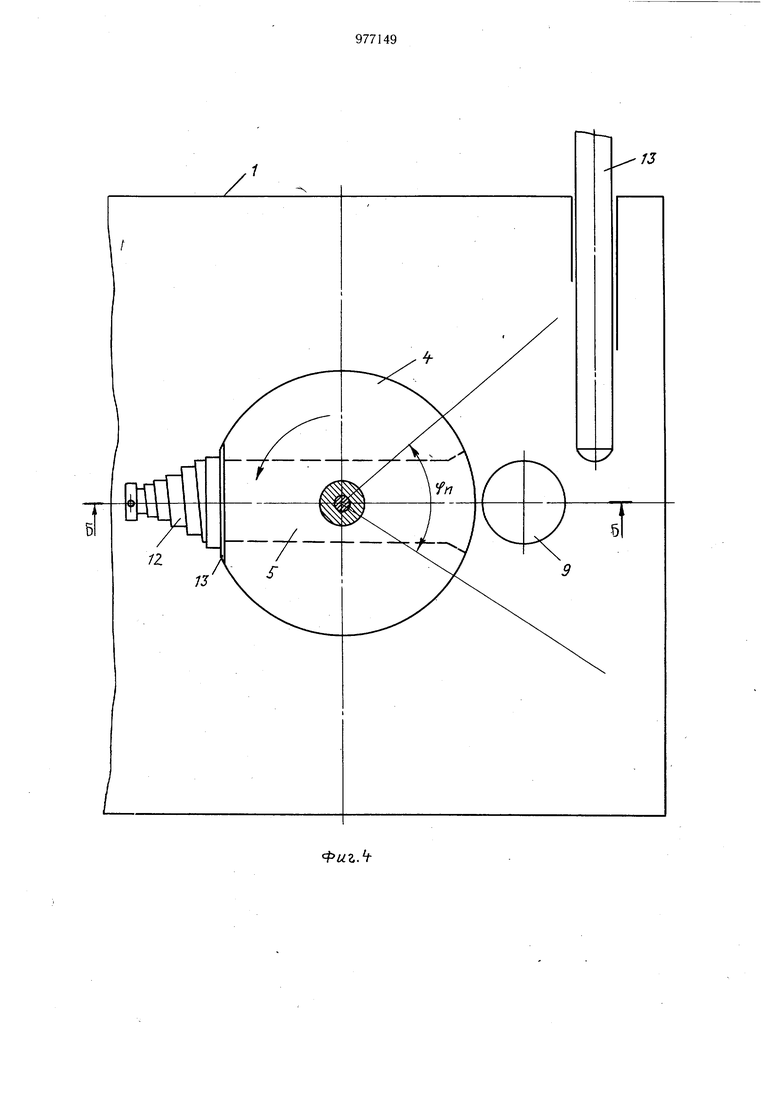
Синхронизирующий узел 20 (механический, электрический или другой) обеспечивает блокировку управляющего узла 18 на определенном угле (Яп) поворота маховика 4, на котором выходу ударника может помешать волновод 14. Центр масс системы боек-противовес смещен относительно оси маховика 4 в сторону противовеса 7. Фиксатор 19 поджат пружиной 12 в направлении груза 15.
1 том случае, когда в результате расчета параметров и по условию компановки конструкции ударного механизма груз 15 должен иметь линейные размеры больше диаметральных, для исключения заклинивания его внутри гибкого элемента 10 груз 15 целесообразно выполнить в виде двух или большего числа масс, связанных между собой шарнирно (фиг. 3). При этом роль кольцевого паза 16 на грузе 15 может играть зазор между массами, входящими в состав груза 15.
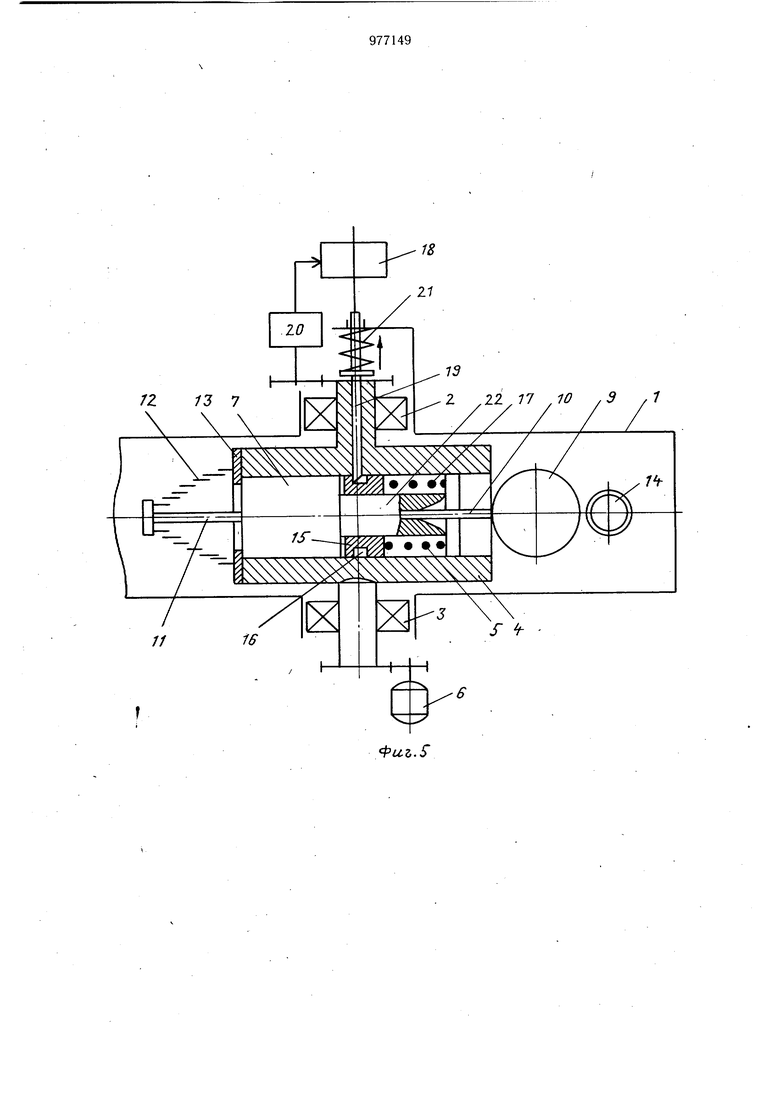
Во втором варианте выполнения центробежный ударный механизм содержит корпус I, в котором в подщипниковых узлах 2 и 3 размещен маховик 4, связанный с приводом 6. В маховике 4 имеется диаметральный паз 5, в котором размещен ударник, выполненный в виде противовеса 7 с направляющим стержнем 2, шарового бойка 9, связанного с направляющим стержнем 22 гибким элементом 10. Противовес 7 ударника связан с маховиком 4 через шток 11 и пружину 12. Упоры 13 ограничивают смещение противовеса 7 влево. В направляющих корпуса I размещен волновод 14. На направляющем стержне 22 размещен груз 15, выполненный в виде кольца, на наружной поверхности которого имеется кольцевой паз 16. Груз 15 отжат влево пружиной 17. Б крайнем лeвo положении центр масс груза 15 смещен в сторону бойка. Управляющий узел 18 может быть нспользован любого типа (ручной, электромагнитный, гидравлическими и пр.) для осевого смещения фиксатора 19. Синхронизирующий узел 20 (механический, электрический и пр.) обеспечивает блокировку управляющего узла 18 на определенном угле (tfp) поворота маховика 4, на котором выходу ударника может помешать волновод 14. Центр масс смещен в сторону противовеса 7 относительно оси вращения маховика 4. Фиксатор 19 поджат пружиной 21 в направлении груза 15.
При размещении направляющего стержня 22 параллельно диаметральному пазу 5 центробежный ударный механизм содержит корпус 1, в котором в подщипниковых узлах 2 и 3 размещен маховик 4, связанный с приводом 6. В маховике 4 имеется диаметральный паз 5, в котором размещен ударник, выполненный в виде противовеса 7, жестко связанного с направляющим стержнем 22, и шарового бойка 9, связанкого с противовесом 7 гибким элементом 10. Направляющий стержень 8 проходит сквозь паз 5 в маховике 4 и радиальное отверстие 12 в маховике 4. Упоры 13- ограничивают смещение противовеса 7 влево. В корпусе 1 размещен волновод 14. На направляющем стержне 22 размещен груз 15, на наружной поверхности которого имеется упор 16. Груз 15 расположен со стороны бойка и прижат к маховику 4 пружиной 17. Управляющий узел 18 может быть использован любого типа, например, ручной, электромагнитный, гидравлический и пр. Фиксатор 19 размещен на маховике 4 с возможностью осевого перемещения и взаимодействует с упором 16, удерживая груз 15 при разгоне маховика 4. Синхронизирующий узел 20 (механический, электрический и пр.) обеспечивает блокировку, управляющего узла 18 на определенном угле поворота Чп маховика 4, На котором выходу ударника может помещать волновод 14. Центр масс системы боек-противовес смещен в сторону противовеса 7 относительно оси вращения маховика 4. Фиксатор 19 поджат пружиной 21 в направлении груза 15. Центробежный ударный механизм по первому варианту выполнения работает следующим образом. При разгоне маховика 4 центробежные силы отжимают ударник влево, а груз 15 вправо. При этом общий центр масс маховика 4 находится по оси его. Когда маховик 4 запасает достаточное количество кинетической энергии, автоматически или вручную кр&тковременно смещается вверх фиксатор 19, сжимая пружину 23 и освобождая груз 15. Груз 15 под действием центробежных сил резко смещается вправо по внутренней поверхности направляющей втулки 8 и гибкого элемента 10, сжамая пружину 17. Смещение груза 15 приводит к тому, что общий центр масс ударника смещается вправо относительно оси маховика 4. А это приводит к тому, что под действием центробежных сил ударник смещается вправо, сжимая пружину 12, и выходит на ударную позицию. После удара бойка по волноводу 14 отключается привод 6. Снижается частота вращения маховика 4, пружина 12 возвращает ударник в крайнее левое положение, а пружина 17 смешает влево груз 15. Груз 15 нажкмает на фиксатор 19, отжимает его, после чего фиксатор 19 попадает в кольцевой паз 16 на грузе 15 и фиксирует груз 15 в исходном положении. Ударный механизм готов к новому циклу работы. По второму варианту выполнения центробежной ударный механизм работает следующим образом., При разгоне маховика 4 центробежные силы отжимают ударник влево, а груз 15 вправо. При этом общий центр масс маховика 4 находится на оси его. Когда маховик 4 запасет достаточное количество кинетической энергии, автоматически или вручную кратковременно смещается вверх фиксатор 19, сжимая пружину 21 и освобождая груз 15. Груз 15 под действием центробежных сил резко смещается вправо по направляющему стержню, сжимая пружину 17. Смещение груза 15 приводит к тому, что общий, центр масс ударника смещается вправо относительно оси маховика 4. А это приводит к тому, что под действием центробежных сил ударник смещается вправо, сжимая пружину 12 и выходит на ударную позицию. После удара бойка по волноводу 14 отключается привод 6. Снижается -)астота вращения маховика 4, пружина 12 возвращает ударник в крайнее левое положение, а пружина 17 смещает влево груз 15. Груз 15 нажимает на фиксатор 19, отжимает его вверх, после чего фиксатор попадает в кольцевой паз 16 на грузе 15 и фиксирует груз 15 в исходном положении. Ударный механизм готов к новому циклу работы. При размещении направляющего стержня параллельно диаметральному пазу 5 во втором варианте выполнения центробежной ударный механизм работает следующим образом. При разгоне маховика 4 центробежные силы отжимают ударник влево, а груз 15 вправо. При этом общий центр масс маховика 4 находится на оси его. Когда маховик 4 запасет достаточное количество энергии, автоматически или вручную кратковременно смещается вверх фиксатор 19, сжимая пружину 21 и освобождая груз 15. Груз 15 под действием центробежных сил резко смещается вправо по направляющему стержню, сжимая пружину 17. Смещение груза 15 приводит к тому, что общий центр масс ударника смещается вправо относительно оси маховика 4. А это приводит к тому, что под действием центробежных сил ударник смещается вправо, сжимая пружину 23, и выходит на ударную позицию. После удара бойка по волноводу 14 отключается привод 6. Снижается частота вращения маховика 4, пружина 12 возвращает ударник в крайнее левое положение, а пружина 17 смещает влево груз 15. Упор 16 приподнимает фиксатор 19 вверх, груз 15 возвращается в крайне левое положение и фиксатор 19, западая за упор 16, фиксирует груз 15 в исходном положении. Ударный механизм готов к новому циклу работы. Применение предлагаемого центробежного ударного механизма позволяет существенно снизить нагрузки на фиксатор управляющего узла и повысить ударную - мощность и надежность механизма, Формула изобретения I. Центробежный ударный механизм, соержащий привод, корпус, размещенные
в нем маховик с диаметральным пазом, соединенный с приводом, ударник, размещенный в пазу маховика и выполненный в виде связанных между собой гибким элементом шарового бойка и противовеса, возвратную пружину ударника, синхронизирующий узел, управляющий узел и связанный с ним фиксатор, отличающийся тем, что, с целью повышения ударной мощности и надежности, он снабжен направляющей втулкой с радиальным отверстием, жестко связанной с противовесом и гибким элементом, выполненным в виде трубы, и подпружи)енным грузом цилиндрической формы с кольцевым пазом на наружной поверхности, взаимодействующим с фиксатором, размешенным в направляющей втулке и гибком элементе со смещением центра масс относительно оси маховика в сторону- шарового бойка.
2.Механизм по п. 1, отличающийсятем, что груз выполнен в виде нескольких масс, связанных шарнирно.
3.Центробежный ударный механизм, содержащий привод,, корпус, размещенные в нем маховик с диаметральным пазом, соединенный с приводом, ударник, размещенный в пазу маховика и выполненный в виде связанных между собой гибким элементом шарового бойка и противовеса, возвратную пружину ударника, синхронизирующий узел, управляющий узел и связанный с ним фиксатор, отличающийся тем, что он снабжен направляющим стержнем, жестко связанным с противовесом и гибким элементом, и подпружиненным грузом, выполненным в виде кольца с кольцевым пазом или упором на наружной поверхности, взаимодействующим с фиксатором и размещенным на направляющем стержне со смещением центра масс от оси маховика в сторону шарового бойка.
4. Механизм по п. 3, отличающийся тем, что направляющий стержень установлен параллельно диаметральному пазу.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 121585, кл. В 25 D 15/00, 1958.
2.Авторское свидетельство СССР
№ 614937, кл. В 25 D 15/00, 1976 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Центробежный ударный механизм | 1982 |
|
SU1021593A1 |
| Центробежный ударный механизм | 1981 |
|
SU1013255A1 |
| Ударный механизм | 1981 |
|
SU1017490A1 |
| Центробежный ударный механизм | 1983 |
|
SU1197830A1 |
| Электромеханический молоток с центробежным ударным механизмом | 1976 |
|
SU614937A1 |
| Машина ударного действия | 1978 |
|
SU747714A1 |
| Машина ударного действия | 1979 |
|
SU903103A1 |
| ПРИВОД ВРАЩАТЕЛЬНО-УДАРНОГО ДЕЙСТВИЯ | 2005 |
|
RU2285104C1 |
| Копер для ударных испытаний | 1979 |
|
SU842441A1 |
| Машина ударного действия | 1990 |
|
SU1798167A1 |
.я
/
