1
Изобретение относится к обо1 удованию для горнорудной- промышленности, а более конкретно, к устройству нагребающих лап погрузочных машин непрерывного действия (типа ИНБ).
Известна нагребающая лапа погрузочной машины, включающая П-образный корпус с вертикальными пазами с боковой наружной стороны, в которых размещена с возможностью перемещения подпружиненная пластина, и кулисный диск с эксцентриковым пальцем Г1 I.
Данное устройство характеризуется недостаточно равномерной нагрузкой на эксцентриковый палец и сам кулисный диск из-за сложности регул 1ровки усилия пружины.
Наиболе е близЛэй по технической сущности к предлагаемой является нагребающая лапа погрузочной машины, включающая П-образный корпус, установленный на подшипниках эксцентрикового пальца кулисного диска, и пол,
,зун, расположенный внутри корпуса, причемкорпус имеет дополнительную опору в виде качетеля, соединяющего корпус с приемной плитой { 2 J.
Недостатками этой конструкции являются ненадежность работы гтри погрузке крепких высокоабразивных руд и пород из-за возможности заклинивания кусков горной массы в элементах
Q механизма: между качателем и корпусом, между корпусом и приемной плитой, а также ненадежность соединения элементов механизма.
Цель изобретения - повышение надежности работы.
Поставленная цель достигается тем, что в нагребающей лапе погрузочной машины, включающей П-образный корпус, установленный на подшипниках эксцент20рикового пальца кулисного диска, и ползун, расположённый внутри корпуса, верхняя внутренняя поверхность корпуса лапы выполнена с наклоном в сторону эксцентрикового пальца, а ползун снабжен подпружиненным роликом, установленным с возможностью взаимодействия с наклонной поверхностью корпуса.
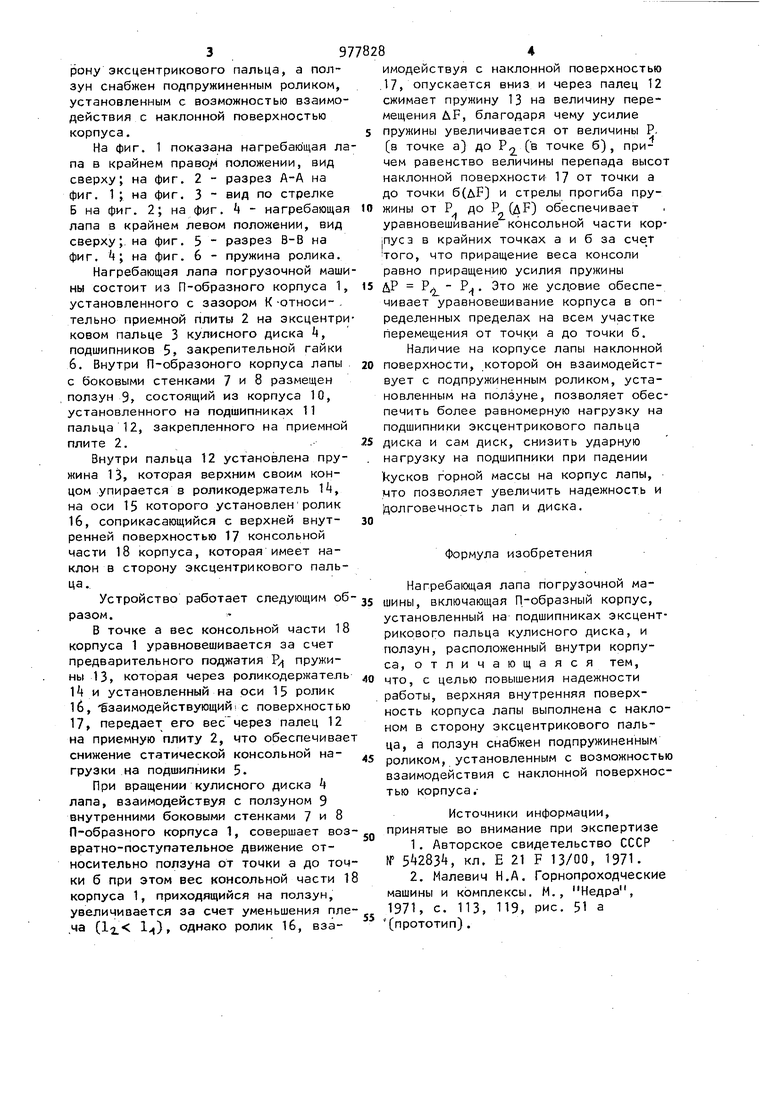
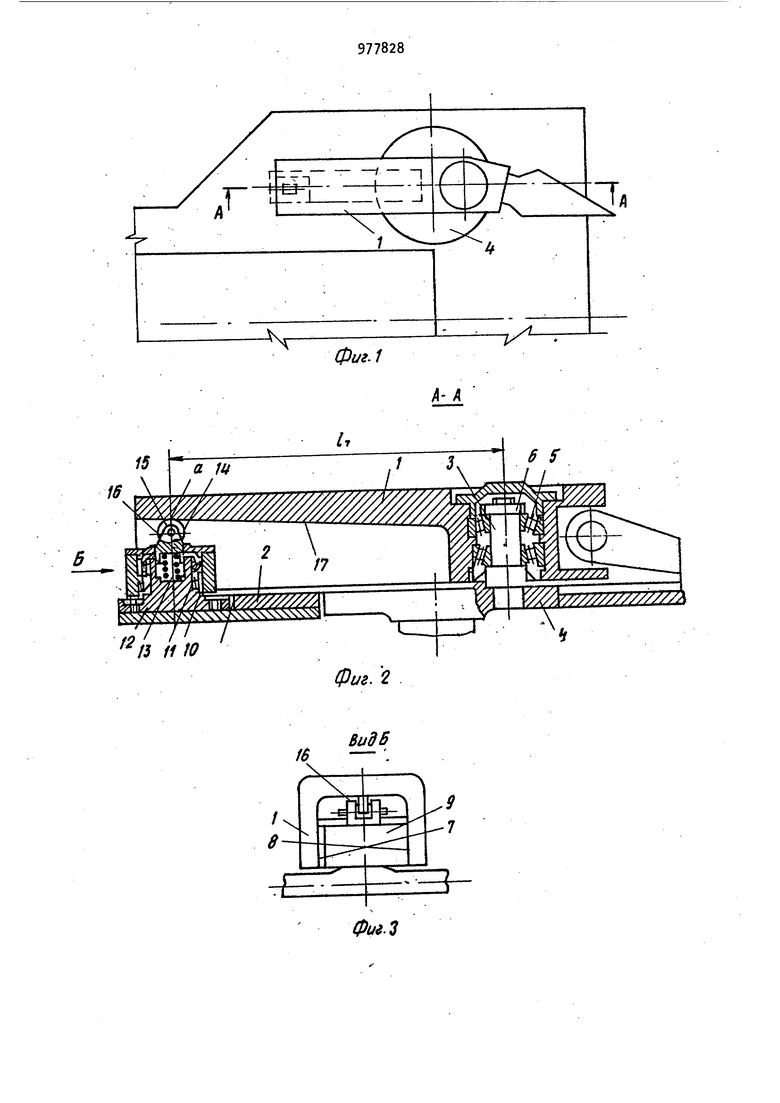
На фиг. 1 показана нагребающая лапа в крайнем право.м положении, вид сверху; на фиг. 2 - разрез А-А на фиг. 1 ; на фиг. 3 - вид по стрелке Б на фиг. 2; на фиг. - нагребающая лапа в крайнем левом положении, вид сверху;, на фиг. 5 - разрез В-В на фиг. ; на фиг. 6 - пружина ролика.
Нагребающая лапа погрузочной машимы состоит из П-образного корпуса 1, установленного с зазором К-относи-, тельно приемной плиты 2 на эксцентри ковом пальце 3 кулисного диска k, подшипников 5, закрепительной гайки 6. Внутри П-образоного корпуса лапы с боковыми стенками 7 и 8 размещен . ползун 9, состоящий из корпуса 10, установленного на подшипниках 11 пальца 12, закрепленного на приемной плите 2.. Внутри пальца 12 установлена пружина 13, которая верхним своим концом упирается в роликодержатель 14, на оси 15 которого установленролик 16, соприкасающийся с верхней внутренней поверхностью 17 консольной части 18 корпуса, которая имеет наклон в сторону эксцентрикового пальЦа. Устройство работает следующим 06 разом. В точке а вес консольной части 18 корпуса 1 уравновешивается за счет предварительного поджатия Р пружины 13, которая через роликодержатель Tt и установленный на оси 15 ролик 16,взаимодействующий с поверхностью 17,передает его вес через палец 12 на приемную плиту 2, что обеспечивае снижение статической консольной нагрузки на подшипники 5. При вращении кулисного диска лапа, взаимодействуя с ползуном 9 внутренними боковыми стенками 7 и 8 П-образного корпуса 1, совершает воз вратно-поступательное движение относительно ползуна от точки а до точ ки б при этом вес консольной части 1 корпуса 1, приходящийся на ползун, увеличивается за счет уменьшения пле ,ча (l2. ) однако ролик 16, взаимодействуя с наклонной поверхностью .17, опускается вниз и через палец 12 сжимает пружину 13 на величину перемещения AF, благодаря чему усилие пружины увеличивается от величины Р, в точке а) до Р (в точке б), причем равенство величины перепада высот наклонной поверхности 17 от точки а до точки б(др) и стрелы прогиба пружины от Р до .Р (дР) обеспечивает уравновешивание консольной части кор|пуса в крайних точках а и б за того, что приращение веса консоли равно приращению усилия пружины дР Р - Р. Это же условие обеспечивает уравновешивание корпуса в определенных пределах на всем участке перемещения от точки а до точки б. Наличие на корпусе лапы наклонной поверхности, которой он взаимодействует с подпружиненным роликом, установленным на ползуне, позволяет обеспечить более равномерную нагрузку на подшипники эксцентрикового пальца диска и сам диск, снизить ударную нагрузку на подшипники при падении ikycKOB горной массы на корпус лапы, 1ЧТО позволяет увеличить надежность и Долговечность лап и диска. Формула изобретения Нагребающая лапа погрузочной машины, включающая П-образный корпус. установленный на подшипниках эксцентрикового пальца кулисного диска, и ползун, расположенный внутри корпуса, отличающаяся тем, что, с целью повышения надежности работы, верхняя внутренняя поверхность корпуса лапы выполнена с наклоном в сторону эксцентрикового пальца, а ползун снабжен подпружиненным роликом, установленным с возможностью взаимодействия с наклонной поверхностью корпуса . Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР ff , кл. Е 21 F 13/00, 1971. 2.Малевич Н.А. Горнопроходческие машины и комплексы. М., Недра, 1971, с. 113, 119, рис. 51 а (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Погрузочная машина с нагребающими лапами | 1981 |
|
SU977829A1 |
| Устройство для фрезерования криволинейных поверхностей изделий | 1981 |
|
SU998000A1 |
| Многогребковый погрузочный орган | 1990 |
|
SU1721268A1 |
| МНОГОГРЕБКОВЫЙ ПОГРУЗОЧНЫЙ ОРГАН | 1996 |
|
RU2112145C1 |
| Погрузочный рабочий орган непре-РыВНОгО дЕйСТВия | 1979 |
|
SU829982A1 |
| ПОГРУЗОЧНАЯ МАШИНА | 2014 |
|
RU2560013C1 |
| ПОГРУЗОЧНЫЙ ОРГАН | 1991 |
|
RU2042830C1 |
| Рабочий орган погрузочной машины | 1984 |
|
SU1170169A1 |
| Погрузочный орган горной машины | 1983 |
|
SU1145161A1 |
| ПОГРУЗОЧНЫЙ ОРГАН АКТИВНОГО ДЕЙСТВИЯ | 2010 |
|
RU2467172C2 |
/// / / /J // Ю
Фиг. 2
ВидВ
Фи.З
