Изобретение относится к горной промышленности и может быть использовано для погрузки горной массы при проходке горных выработок и на очистных работах.
Известна нагребающая лапа погрузочной машины (А.с. №542834, опубл. 15.01.1977 г.), включающая привод, корпус и гребок, у которой корпус лапы выполнен с вертикальным пазом и снабжен расположенной в нем подпружиненной выдвижной пластиной.
Недостатком указанной нагребающей лапы является ограниченность траектории, описываемой передней кромкой лапы.
Известна погрузочная машина с нагребающими лапами (А.с. №977829, опубл. 30.11.1982 г.), содержащая ходовой механизм с рамой, приемный стол, закрепленный на раме, конвейер, рабочий орган с приводом и нагребающими лапами, установленными неподвижно относительно приемного стола, дополнительный рабочий орган.
Недостаток указанной погрузочной машины заключается в том, что парные нагребающие лапы выполнены неподвижными относительно приемного стола, что ограничивает область захвата ими горной массы и требует установки дополнительного рабочего органа, что значительно усложняет конструкцию машины.
Известен погрузочный орган горной машины (патент РФ №2038483, опубл. 27.06.1995 г.), включающий стол с конвейером, парные нагребающие лапы, выполненные в виде телескопического устройства, которое состоит из подвижной и неподвижной частей. Подвижная и неподвижная части связаны между собой механизмом относительного перемещения вперед-назад и соединены с механизмом перемещения вправо-влево посредством шарнирной подвижной связи.
Недостатком указанного решения является сложность процесса управления погрузочным органом.
Известен погрузочный орган (патент РФ №2042830, опубл. 27.08.1995 г.), содержащий приемный стол с установленными на нем ведущими дисками, нагребающие лапы, связанные со столом, нижние диски, взаимодействующие с указанными дисками и установленные соосно с ними, привод вращения дисков, установленный на приемном столе.
Недостатком данного решения является необходимость в приводе вращения дисков, выполненном в виде силового гидроцилиндра двустороннего действия, что усложняет конструкцию машины.
Известен рабочий орган активного действия (патент РФ №2467172, опубл. 20.11.2012 г.) с парными нагребающими лапами, у которых рабочая и хвостовая части выполнены криволинейными.
Недостаток данного исполнения заключается в том, что траектории, описываемые передними кромками рабочей части лапы, имеют ограниченную площадь, определяемую кинематикой механизма лапы, что не позволяет повысить производительность погрузочной машины.
Известна погрузочная машина 1ПНБ-2 (Погрузочная машина непрерывного действия с боковой разгрузкой) («Машины и оборудование для проведения горизонтальных и наклонных горных выработок». Под ред. Б.Ф. Братченко, М., 1975 г., с. 209), принятая за прототип, содержащая ходовую часть с приводом, приемную плиту, парные нагребающие лапы с приводными дисками, кулисы, приемный перегрузочный скребковый конвейер. Нагребающие лапы машины имеют прямолинейную рабочую часть и криволинейную хвостовую, при этом выпуклость криволинейной хвостовой части обращена к оси приемного перегрузочного конвейера.
Недостаток указанной погрузочной машины состоит в том, что траектория, описываемая передней кромкой лапы, ограничивает объем нагребаемой горной массы, не обеспечивает полного перемещения насыпного груза на приемный перегрузочный скребковый конвейер, что приводит к скоплению, «заштыбовке», груза перед приемным конвейером, создает дополнительные сопротивления движению нагребающих лап, снижает скорость продвижения насыпного груза по конвейеру и уменьшает производительность погрузочной машины в целом.
Техническим результатом предложения является повышение производительности погрузочной машины за счет увеличения площади захвата насыпного груза, размещенной в траектории описываемой передней кромкой лапы на приемной плите, исключение скопления материала перед приемным конвейером, «заштыбовки» груза, уменьшение размера «мертвых» зон, не охватываемых траекторией передней кромки лапы на приемной плите.
Технический результат достигается тем, что погрузочная машина, содержащая ходовую часть с приводом, приемную плиту, парные нагребающие лапы с прямолинейной рабочей частью и криволинейной хвостовой, приводные диски, кулисы, приемный перегрузочный скребковый конвейер, согласно изобретению криволинейная хвостовая часть нагребающей лапы выполнена дугообразной формы с внешней выпуклостью и с постоянным радиусом кривизны, равным R=2L, которая подвижно связана с кулисой, шарнирно закрепленной на приемной плите на расстоянии =0,2 L; Y=0,7 L от центра вращения приводного диска, где L - длина прямолинейной рабочей части лапы, X, Y -расстояние от центра шарнира кулисы до центра вращения приводного диска соответственно по горизонтали и вертикали.
Такое решение погрузочной машины обеспечивает увеличение площади захвата насыпного груза, размещенной в траектории, описываемой передней кромкой лапы на приемной плите, уменьшение размера «мертвых» зон, не охватываемых траекторией передней кромки лапы, снижает энергозатраты на внедрение машины в насыпной груз и повышает производительность погрузочной машины.
Погрузочная машина поясняется следующими чертежами:
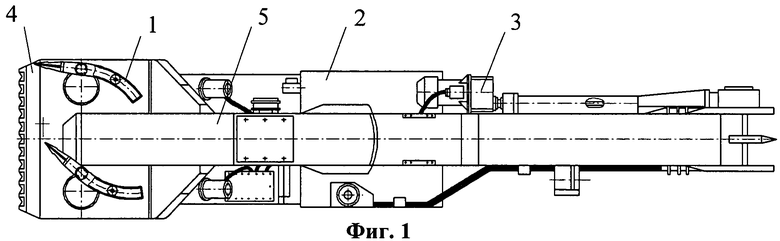
фиг. 1 - погрузочная машина с рабочим органом;
фиг. 2 - рабочий орган погрузочной машины;
фиг. 3 - сечение А-А нагребающей лапы;
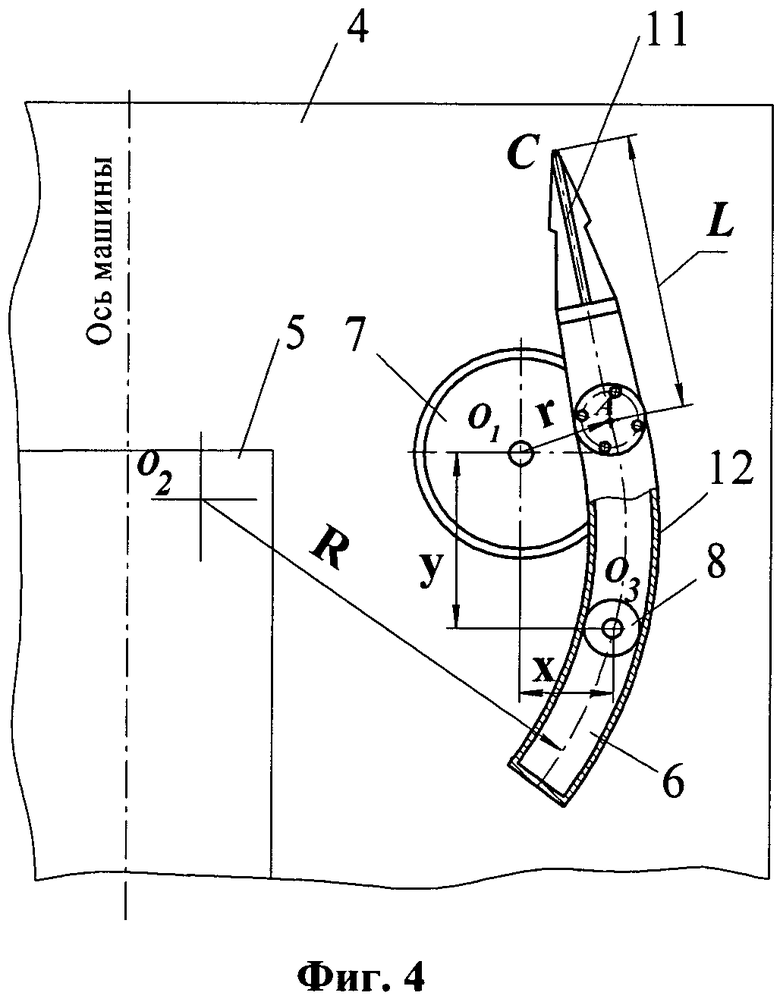
фиг. 4 - нагребающая лапа рабочего органа;
фиг. 5 - кинематическая схема механизма нагребающей лапы, где
1 - рабочий орган;
2 - ходовая часть;
3 - привод;
4 - приемная плита;
5 - приемный перегрузочный скребковый конвейер;
6 - нагребающая лапа;
7 - приводные диски;
8 - кулисы;
9 - цилиндры;
10 - ось;
11 - прямолинейная рабочая часть;
12 - криволинейная хвостовая часть;
13 - траектория;
14 - ось машины;
15 - приемное окно конвейера.
Погрузочная машина (фиг. 1) состоит из рабочего органа 1, ходовой части 2 с приводом 3, приемной плиты 4, приемного перегрузочного скребкового конвейера 5.
Рабочий орган погрузочной машины (фиг. 2) включает парные нагребающие лапы 6, приводные диски 7, кулисы 8, выполненные в виде вращающихся цилиндров 9 (фиг. 3), шарнирно закрепленных на приемной плите 4 при помощи осей 10.
Нагребающая лапа 6 состоит из двух частей: прямолинейной рабочей части 11 (фиг. 4) и криволинейной хвостовой 12.
Длина прямолинейной рабочей части лапы 11 равна L (фиг. 4, 5). При этом криволинейная хвостовая часть лапы 12 выполнена дугообразной формы с внешней выпуклостью и с постоянным радиусом кривизны, равным R=2L, с центром кривизны О2 и подвижно связана с кулисой 8. Центр шарнира О3 кулисы 8 расположен относительно центра вращения O1 приводного диска 7 на расстоянии X=0,2 L по горизонтали и на расстоянии Y=0,7 L по вертикали.
При таком решении механизма нагребающей лапы погрузочной машины передняя кромка лапы (точка С) описывает траекторию 13 (фиг. 5), площадь которой на 30% больше площади траектории, описываемой передней кромкой лапы погрузочной машины 1ПНБ-2, принятой за прототип. Производительность погрузочной машины непрерывного действия с парными нагребающими лапами напрямую зависит от объема материала, зачерпываемого за цикл работы (один оборот ведущего диска), который определяется площадью S, заключенной внутри траектории.
Кроме того, траектория рационально расположена на площади приемной плиты. На стадии внедрения в насыпной груз лапа максимально охватывает боковой участок поверхности плиты, обеспечивает выход передней кромки лапы за габарит приемной плиты на величину h (фиг. 5), достаточную для предварительного рыхления материала, а на стадии транспортирования и передачи груза на скребковый перегрузочный конвейер 5 (фиг. 5) пересекает ось машины 14 и доходит непосредственно до приемного окна 15 конвейера, что обеспечивает полную передачу насыпного груза на приемный конвейер, не создавая скопления материала перед приемным окном.
Работа машины осуществляется следующим образом. При включенном приводе 3 ходовой части 2 (фиг. 1) погрузочная машина движется в направлении насыпного груза и внедряется в него приемной плитой 4 на определенную глубину. Включением привода нагребающих лап 6 приводят во вращательное движение приводные диски 7, которые, в свою очередь, приводят в движение нагребающие лапы 6, совершающие сложное плоскопараллельное движение относительно кулис 8.
Лапа 6 за один полный оборот ведущего диска, соответствующий одному циклу работы, внедряется в насыпной груз, захватывает его и передает на приемный перегрузочный скребковый конвейер 5 (фиг. 4, 5). Парные нагребающие лапы 6 работают в противофазе. При этом объем захватываемого насыпного груза за один цикл работы нагребающих лап определяется площадью, заключенной внутри траектории S (фиг. 5), описываемой передней кромкой лапы С.
Анализ траектории передней кромки лапы погрузочной машины 1ПНБ-2, принятой за прототип, и предлагаемой погрузочной машины показал, что площадь, заключенная внутри траектории, обеспечиваемой механизмом машины 1ПНБ2, составляет S=0,32 м2, а механизм нагребающих лап предлагаемой машины позволяет получить площадь S=0,450 м2, т.е. на 30% больше, следствием чего является увеличение производительности погрузочной машины примерно на 30%.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОГРУЗОЧНЫЙ ОРГАН | 1991 |
|
RU2042830C1 |
| Многогребковый погрузочный орган | 1990 |
|
SU1721268A1 |
| МНОГОГРЕБКОВЫЙ ПОГРУЗОЧНЫЙ ОРГАН | 1996 |
|
RU2112145C1 |
| Погрузочный орган горной машины | 1983 |
|
SU1145161A1 |
| ПОГРУЗОЧНЫЙ ОРГАН | 1990 |
|
RU2022894C1 |
| ПОГРУЗОЧНЫЙ ОРГАН АКТИВНОГО ДЕЙСТВИЯ | 2010 |
|
RU2467172C2 |
| Погрузочный орган горной машины | 1977 |
|
SU748015A1 |
| Погрузочная машина | 1983 |
|
SU1157267A1 |
| Погрузочно-зачистной агрегат | 1991 |
|
SU1809120A1 |
| Механизированный бункер | 1972 |
|
SU597859A1 |



Изобретение относится к горной промышленности и может быть использовано для погрузки горной массы при проходке горных выработок и на очистных работах. Техническим результатом является повышение производительности погрузочной машины за счет увеличения площади захвата насыпного груза, размещенной в траектории, описываемой передней кромкой лапы на приемной плите. Погрузочная машина, содержащая ходовую часть с приводом, приемную плиту, парные нагребающие лапы с прямолинейной рабочей частью и криволинейной хвостовой, приводные диски, кулисы, приемный перегрузочный скребковый конвейер. При этом криволинейная хвостовая часть нагребающей лапы выполнена дугообразной формы с внешней выпуклостью и с постоянным радиусом кривизны, равным R=2L, которая подвижно связана с кулисой, шарнирно закрепленной на приемной плите на расстоянии X=0,2L; Y=0,7L от центра вращения приводного диска, где L - длина прямолинейной рабочей части лапы, X, Y - расстояние от центра шарнира кулисы до центра вращения приводного диска соответственно по горизонтали и вертикали. 5 ил.
Погрузочная машина, содержащая ходовую часть с приводом, приемную плиту, парные нагребающие лапы с прямолинейной рабочей частью и криволинейной хвостовой, приводные диски, кулисы, приемный перегрузочный скребковый конвейер, отличающаяся тем, что криволинейная хвостовая часть нагребающей лапы выполнена дугообразной формы с внешней выпуклостью и с постоянным радиусом кривизны, равным R=2L, которая подвижно связана с кулисой, шарнирно закрепленной на приемной плите на расстоянии X=0,2L; Y=0,7L от центра вращения приводного диска, где L - длина прямолинейной рабочей части лапы, X, Y - расстояние от центра шарнира кулисы до центра вращения приводного диска соответственно по горизонтали и вертикали.
| ПОД РЕД | |||
| Б.Ф | |||
| БРАТЧЕНКО, Машины и оборудование для проведения горизонтальных и наклонных горных выработок, Москва, 1975, с | |||
| Парный рычажный домкрат | 1919 |
|
SU209A1 |
| ПОГРУЗОЧНЫЙ ОРГАН | 1991 |
|
RU2042830C1 |
| Погрузочный орган бокового захвата | 1982 |
|
SU1155778A1 |
| Погрузочный орган | 1987 |
|
SU1544689A1 |
| ПОГРУЗОЧНЫЙ ОРГАН АКТИВНОГО ДЕЙСТВИЯ | 2010 |
|
RU2467172C2 |
| CN 203271742 U, 06.11.2013 | |||

