Изобретение относится к строительно- дорожному машиностроению, в частности к системам автоматического управления рабочим органом землеройно-транспортной машины.
Цель изобретения - повышение точности работы землеройно-транспортной машины в режиме копания.
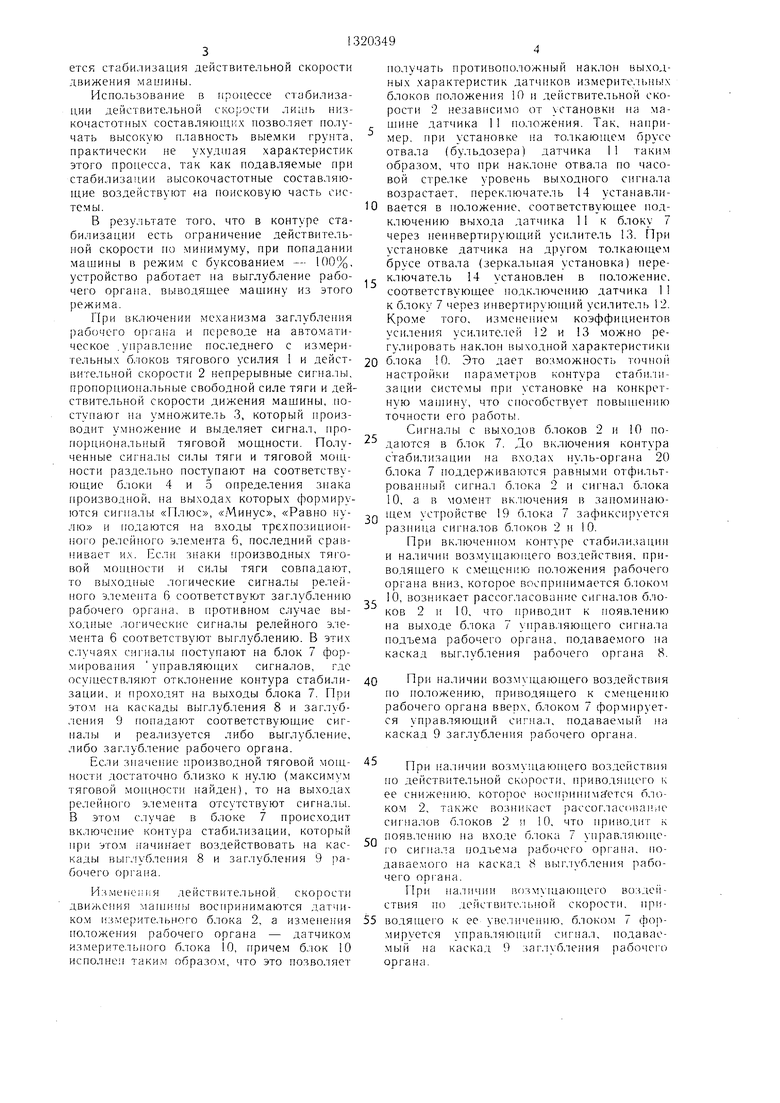
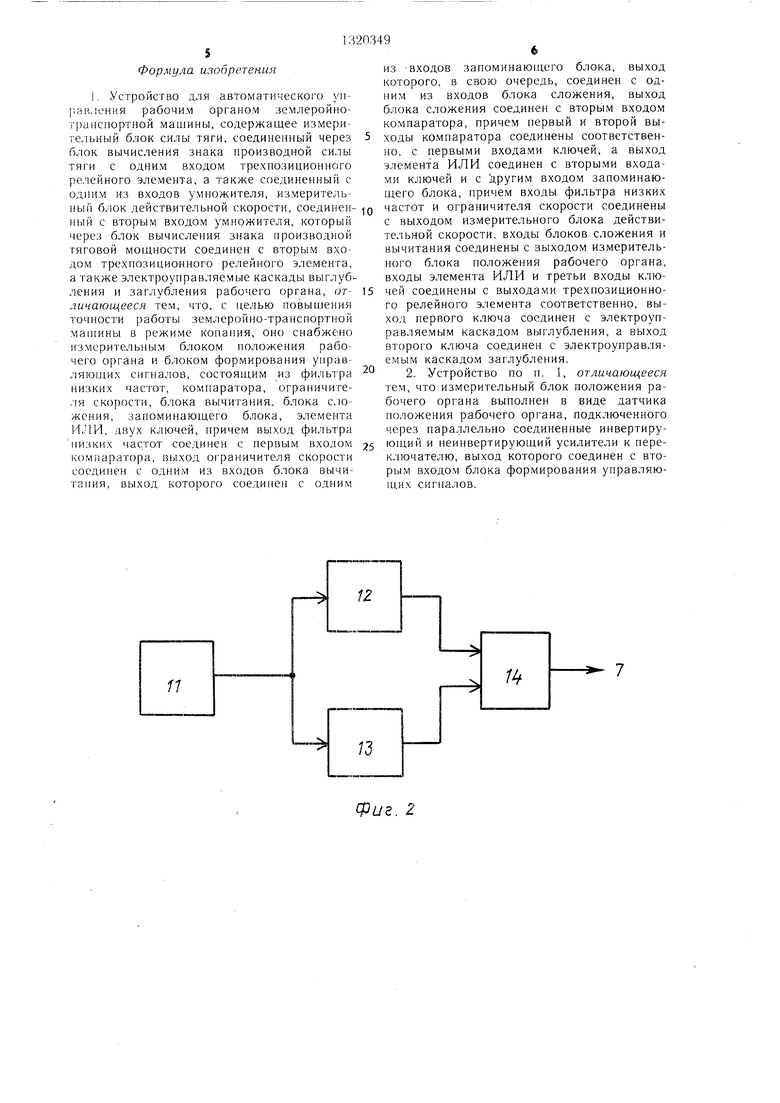
На фиг. 1 изображена блок-схема системы автоматического управления рабочим органом землеройно-транспортной машины; на фиг. 2 - функциональная схема измерительного блока положения рабочего органа; на фиг. 3 - функциональная схема блока формирования управляюш,их сигналов; на фиг. 4 - зависимости напряжений на входах компаратора блока формирования управляюших сигналов от углового положения рабочего органа.
Устройство состоит из измерительных блоков 1 и 2, соединенных с умножителем 3. В свою очередь, измерительный блок 1 и умножитель 3 через блоки 4 и 5 вычисления знака производной соединены с трехпозиционным релейным элементом 6, который двумя выходами подключен к соответствующим двум входам блока 7 фЬрми- рования управляюших сигналов. Выходы последнего соединены с электроуправляе- мыми каскадами выглубления 8 и заглубления 9. Выходы измерительных блоков действительной скорости 2 и положения рабочего органа 10 подключены к лвум входам блока 7 формирования управляюших сигналов.
Измерительный блок положения рабочего органа 10 (фиг. 2) состоит из датчика 11 положения рабочего органа, соединенного через инвертирующий 12 и неинвертирующий 13 усилители с переключателем 14, выход которого подключен к блоку 7 формирования управляюших сигналов.
Блок 7 формирования управляющих сигналов (фиг. 3) состоит из фильтра 15 низких частот, ограничителя 16 скорости, соединенного с одним из Входов блока 17 вычитания, выход которого подключен также к одному из входов запоминаюпдего блока 18. Выход последнего соединен с одним из входов блока 19 сложения, выход которого, а также выход фильтра 15 низких частот соединены с соответствующими входами нуль-органа 20. Два вЬ)1хода нуль-органа 20 подключены соответственно к одному из входов ключей 21 и 22. Блок 7 содержит также логический элемент ИЛИ 23, выход которого соединен с входами запоминающего блока 18 и ключей 21 и 22. Выход измерительного блока 2 действительной скорости подключен к входам фильтра 15 низких частот и ограничителя 16 скорости выход измерительного блока 10 положения рабочего органа подключен к вторым входам блока 17 вычитания и блока 19 сложения. Оба выхода трехпозиционного релейно0
5
0
5
0
5
0
5
0
5
го элемента 6 подключены к двум входам логического элемента ИЛИ 23 и к третьим входам ключей 21 и 22. Выходы последних, являющиеся выходами блока 7 формирования управляющих импульсов, соединены соответственно с электроуправляемыми каскадами выступления 8 и заглубления 9.
Устройство работает следующим образом.
Принцип действия устройства основ ан на поиске макси.мума тяговой мощности с последующей стабилизацией углового положения рабочего органа и действительной скорости движения мащины по низкой частоте.
Иоиск максимума тяговой мощности осуществляется по знакам производнь1х тяговой мощности Wj и силы тяги РТ путем выглубления и заглубления рабочего органа. При этом в контуре стабилизации сигнал положения рабочего органа Ue поддерживается равны.м сигналу действительной скорости Uv, т. е. происходит автоматическая настройка контура в точку С (фиг. 4). Однако в этом случае сигналы стабилизации не воздействуют на привод рабочего органа.
После того, как максимум тяговой мощности найден, т. е. выполнено условие VFj.. , где -зона нечувствительности по производной тяговой мощности, когда производная тяговой мощности достаточно близка к нулю, происходит включение контура стабилизации действительной скорости (блоки 2, 7, 8, 9, фиг. 1) и положения рабочего органа (блоки 10, 7, 8, 9, фиг. 1). В этот момент выполняется равенство . В процессе работы возникают рассогласования по положению рабочего органа Ue (t) Ue (t) - Uy (/), которые компенсируются контуром стабилизации. При этом компенсация рассогласования по положению происходит до изменения действительной скорости движения мащины, так как этот параметр имеет существенно более высокое значение временной задержки, чем время реакции системы на изменение положения рабочего органа, т. е. рассматривая стабилизацию положения рабочего органа, можно считать, что скорость остается постоянной )const.
При возникновении отклонения действительной скорости машины от исходного ее значения (t) в контуре стабилизации появляется расстройка по положению АУд(0. Так как характеристики Uy и UQ, приведенные на фиг. 4, имеют противоположный наклон, то снижение действительной скорости соответствует положительной расстройке по положению, приводящей к выглублению рабочего органа, а ее увеличение соответствует отрицательной расстройке, приводящей к заглублению рабочего органа. Таким образом, осуществля
ется стаоилизация действительной скорости движения машины.
Использование в процессе С1абилиза- ции действительной скорости лишь низ- кочастотных составляющих позволяет получать высокую плавность выемки грунта, практически не ухуд1пая характеристик этого процесса, так как подавляемые при стабилизации высокочастотные составляющие воздействуют на поисковую часть системы.
В результате того, что в контуре стабилизации есть ограничение действительной скорости по минимуму, при попадании машины в режим с буксованием - 100%, устройство работает на выглубление рабочего органа. выводяца.ее машину из этого режима.
При включении ме.ханизма заглубления рабочего opratia и переводе на автоматическое .управле}1ие последнего с измери- тельны.ч блоков тягового усилия 1 и деист- вительной скорости 2 непрерывные сигналы, пропорциональные свободной силе тяги и действительной скорости дижения машины, поступают на умножитель 3, который производит умножение и выделяет сигнал, нро
порциональныи тяговой мощности. Полу- ченные сигна:1ы силы тяги и тяговой мощности раздельно поступают на соответствующие блоки 4 и 5 определения знака нроизводной, па выходах которых формируются сигналы «Плюс, «Минус, «Равно нулю и подаются на входы трехпозицион- пого релейного элемента 6, последний сравнивает их. Если знаки производных тяговой мопиюсти и силы тяги совпадают, то выходные логические сигналы релейного элемента 6 соответствуют заглублению рабочего органа, в противном случае выходные ло ические сигналы релейного 3, ie- мента б соответствуют выглублению. В этих случаях сигаалы поступают па блок 7 формирования управляющих сигналов, где осуществляют отклонение контура стабили- зации, и проходят на выходы блока 7. При этом на каскады выглубления 8 и заглубления 9 попадают соответствуюпдие сиг- палы и реализуется либо выглубление, либо заглубление рабочего органа.
Если значение нроизводной тяговой мощ- ности достаточно близко к нулю (максимум тяговой мощности найден), то на выходах релейного элемента отсутствуют сигналы. В этом случае в блоке 7 происходит включение контура стабилизации, который нри это.м начинает воздействовать на кас- кады 5ыглублепия 8 и заг. П бления 9 рабочего органа.
Измепешгя действительной скорости движения мап1ииы воспринимаются датчи- ко.м из.мерительного блока 2, а изменения положения рабочего органа - датчико.м измерительного блока 10, причем блок 0 исполнен таки.ч образо.м, что это позволяет
5
0
0
с
- 0
5 0
5
0
5
получать нротивопо,тожныи наклон выходных характеристик датчи.ков измерительных блоков ноложения 10 и действительной скорости 2 независимо от установки на ма- щипе датчика 1 1 положения. Так, например, при установке на толкающем брусе отвала (бульдозера) датчика 11 таким образом, что при наклопе отвала по часовой стрелке уровень выходного сигнала возрастает, переключате.чь 14 устанавливается в ноложение, соответствующее подключению выхода датчика 11 к блоку 7 через неипвертирующий усилитель 13. При установке датчика па другом толкающем брусе отвала (зеркальная установка) переключатель 14 установлен в положение, соответствующее нодключепию датчика 1 1 к блоку 7 через инвертируюпиш усилитель 12. Кроме того, изменением коэффициентов усиления усилите. 1ей 12 и 13 .можно регулировать наклон выходной характеристик блока 0. Это дает возможность точной настройки параметров контура стаби.чи- зации системы при установке на конкретную машину, что способствует повышению точности его работы.
Сигпалы с выходов блоков 2 и 10 подаются в блок 7. До включения контура стабилизации на входах нуль-органа 20 блока 7 поддерживаются равными отфильтрованный сигнал блока 2 и си|-пал блока 10, а в мо.мент включения в запоминающем устройстве 19 блока 7 зафиксируется разница сигналов блоков 2 и 10.
При включенном стабилизации и наличии возмущающего воздействия, приводящего к смещению положения рабочего органа вниз, которое воспринимается б. юком 10, возникает рассог/шсование сигналов б,чо- ков 2 и 10, что нри водит к появлению на выходе блока 7 унравляющего сигнала подъема рабочего органа, подаваемого на каскад выглуб,1ения рабочего органа 8.
При наличии возмущаюпдего воздействия по положению, приводящего к смещению рабочего органа вверх, блоком 7 формируется управляюпхий сигна.п, подаваемый па каскад 9 заглубления рабочего органа.
При нал.ичии возмущаюп1его воздействия но действительной скорости, приводящего к ее снижению, которое воспринимагется блоком 2, также возникает рассогласг. сиг палов блоков 2м 10, что 11ривод1гг к 1К)явле1 ию па входе б.юна 7 управ,1як)П1е- го сигнала подъема рабочего орг ана, но- даваел ого па каскад 8 выглублепия рабочего opi ana.
При наличии возмущаюн1.его возде - ствия по действите.1ьной скорости, нри- водяще1-о к ее увеличению, блоком 7 формируется управляющий сигнал, подаваемый на каскад 9 заг., рабочего органа.
Формула изобретения
. Устройство для автоматического уп- рар,.1ения рабочим органом землеройно- тра1 сг10ртной машины, содержащее измерительный блок силы тяги, соединенный через блок вычисления знака производной силы тяги с одним входом трехпозиционного релейного элемента, а также соединенный с одним из входов умножителя, измерительный блок действительной скорости, соединенный с вторым входом умножителя, который через блок вычисления знака производной тяговой мощности соединен с вторым входом трехпозиционного релейного элемента, а также электроунравляемые каскады выглуб- ления и заглубления рабочего органа, отличающееся тем, что, с целью повышения точности работы землеройно-транспортной машины в режиме копания, оно снабжено измерительным блоком положения рабочего органа и блоком формирования управ- ляюглих сигналов, состоящим из фильтра низких частот, компаратора, ограничителя скорости, блока вычитания, блока c:io- жения, запоминающего блока, элемента ИЛИ, двух ключей, причем выход фильтра низких частот соединен с первым входом компаратора, выход ограничителя скорости соединен с одним из входов блока вычитания, выход которого соединен с одним
из -входов запоминающего блока, выход которого, в свою очередь, соединен с одним из входов блока сложения, выход блока сложения соединен с вторым входом компаратора, причем первый и второй выходы компаратора соединены соответственно, с первыми входами ключей, а выход элемента ИЛИ соединен с вторыми входами ключей и с другим входом запоминающего блока, причем ВХОДЬЕ фильтра низких
частот и ограничителя скорости соединены с выходом измерительного блока действительной скорости, входы блоков сложения и вычитания соединены с выходом измерительного блока положения рабочего органа, входы элемента ИЛИ и третьи входы ключей соединены с выходами трехпозиционного релейного элемента соответственно, выход первого ключа соединен с электроуп- равляемым каскадом выглубления, а выход второго ключа соединен с электроуправля- емым каскадом заглубления.
2. Устройство по п. 1, отличающееся тем, что измерительный блок положения рабочего органа выполнен в виде датчика положения рабочего органа, подключенного через параллельно соединенные инвертируюпдий и неинвертирующий усилители к переключателю, выход которого соединен с вторым входом блока формирования управляю- 1ЦИХ сигналов.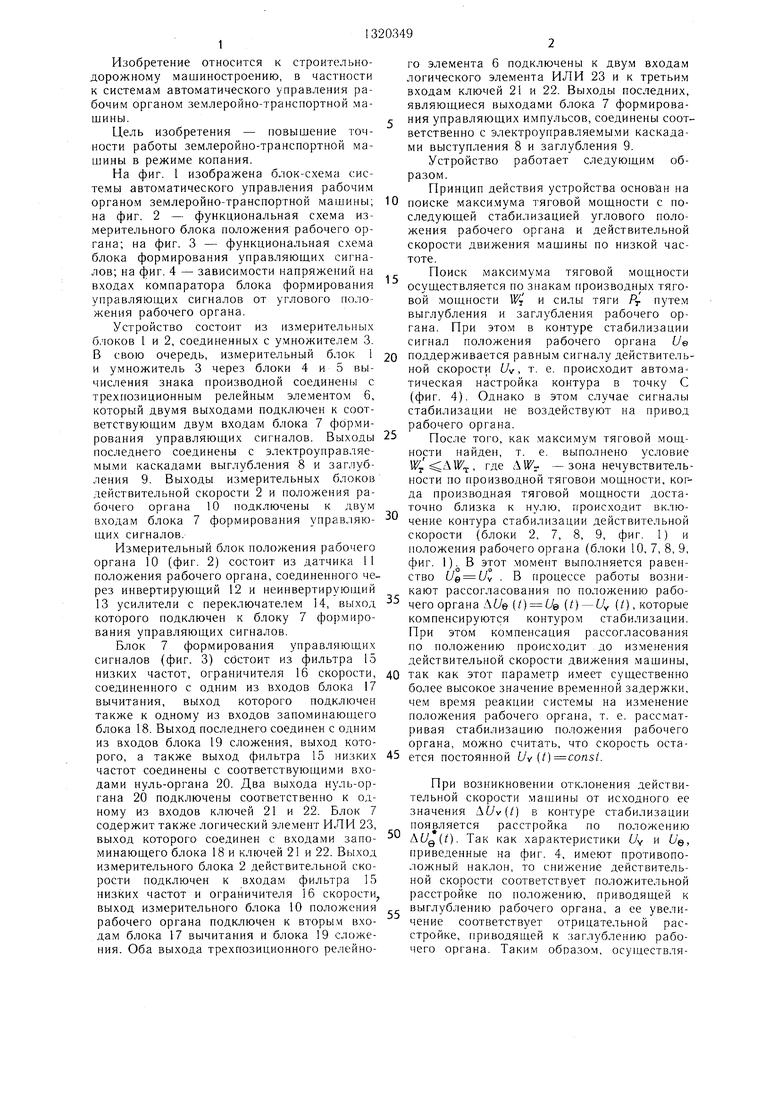
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1979 |
|
SU881225A1 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1980 |
|
SU994651A2 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1986 |
|
SU1420126A1 |
| Устройство для автоматического управления рабочим органом землеройнотранспортной машины | 1975 |
|
SU557156A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 2004 |
|
RU2291254C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ АВТОГРЕЙДЕРА | 2006 |
|
RU2327011C2 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1985 |
|
SU1271951A1 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1988 |
|
SU1513091A1 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1978 |
|
SU735718A1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 1997 |
|
RU2131961C1 |
Изобретение относится к строительно- дорожному машиностроению и позволяет повысить точность работы землеройно-тран- спортной машины в режиме копания. Устр- во состоит из измерительных блоков (ИБ) силы тяги 1 и действительной скорости 2, соединенных с умножителем 3. Умножитель 3 и ИБ 1 через блоки 4 и 5 вычисления знака производной соединены с трехпозицион- ным релейным элементом 6. Выходы элемента 6 подключены к двум входам блока 7 формирования управляющих сигналов. Выходы блока 7 соединены с электроуправ- ляемыми каскадами выглубления 8 и заглубления 9 рабочего органа (РО). Выходы ИБ 2 и 10 положения РО подключены к двум другим входам блока 7, состоящего из фильтра низких частот, компаратора, ограничителя скорости, блоков вычитания и сложения, запоминающего блока, элемен1а ИЛИ и дух ключей. Устр-во осуществляет поиск максимума тяговой мощности (ТМ) с последуюиа,ей стабилизацией углового положения РО и действительной скорости движения машины по низкой частоте. Поиск максимума ТМ осуществляется по знакам производных ТМ и силы тяги путем перемещения РО. Рассогласования по положению РО компенсируются контуром стабилизации действительной скорости движения машины. При ее отклонении блок 7 формирует управляющий сигнал на перемещение РО 1 3. п. ф-лы, 4 ил. о (Л со tsD о ОО 4; со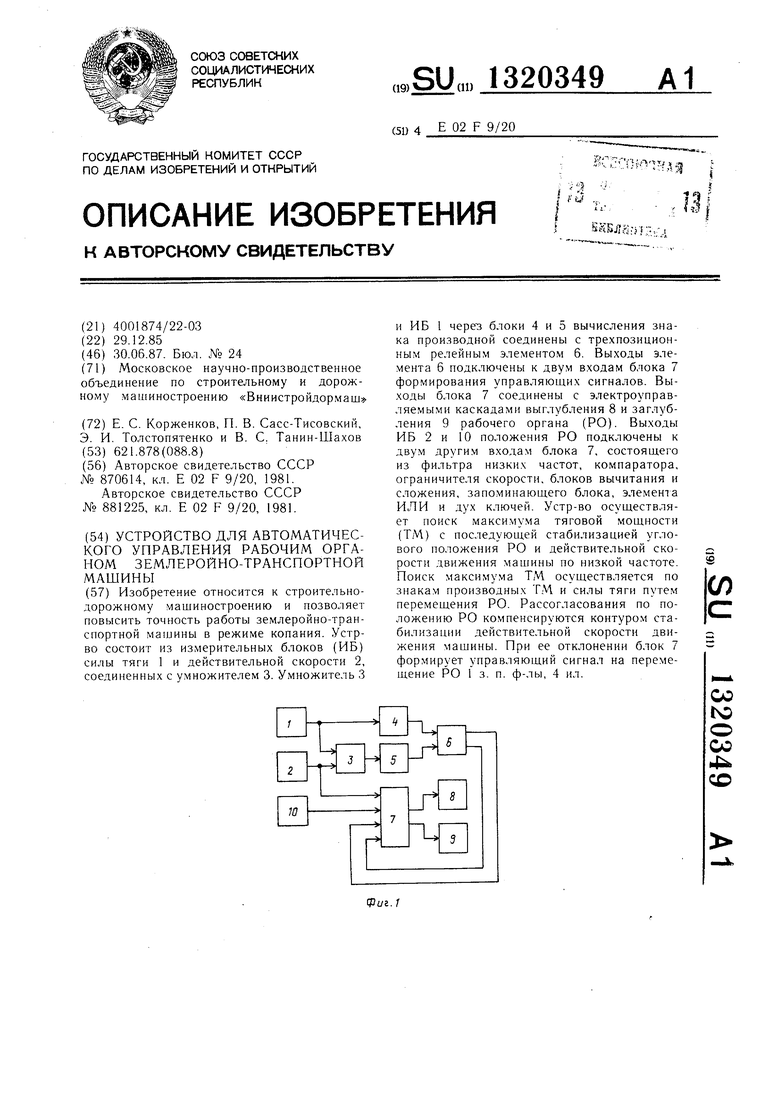
- 7
Фиг. 2
6
cpuz.3
i/n
в
Составитель о. Капканец
Редактор Н. КиштулинецТехред И. ВересКорректор Л. Демчик
Заказ 2622/29Тираж 606Подписное
ВНИИПИ Государственного комитета СССР по делам и.чобретспий и открытий
в
о
Фие.
| Система управления бульдозерным агрегатом | 1980 |
|
SU870614A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1979 |
|
SU881225A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
