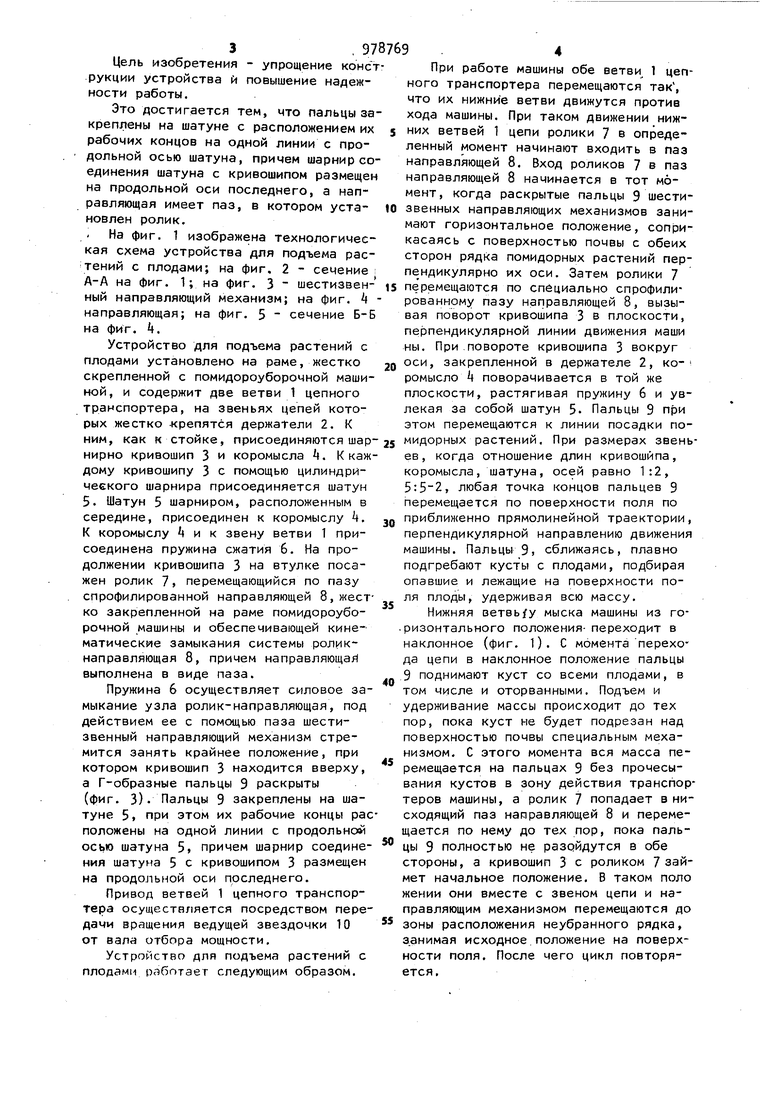
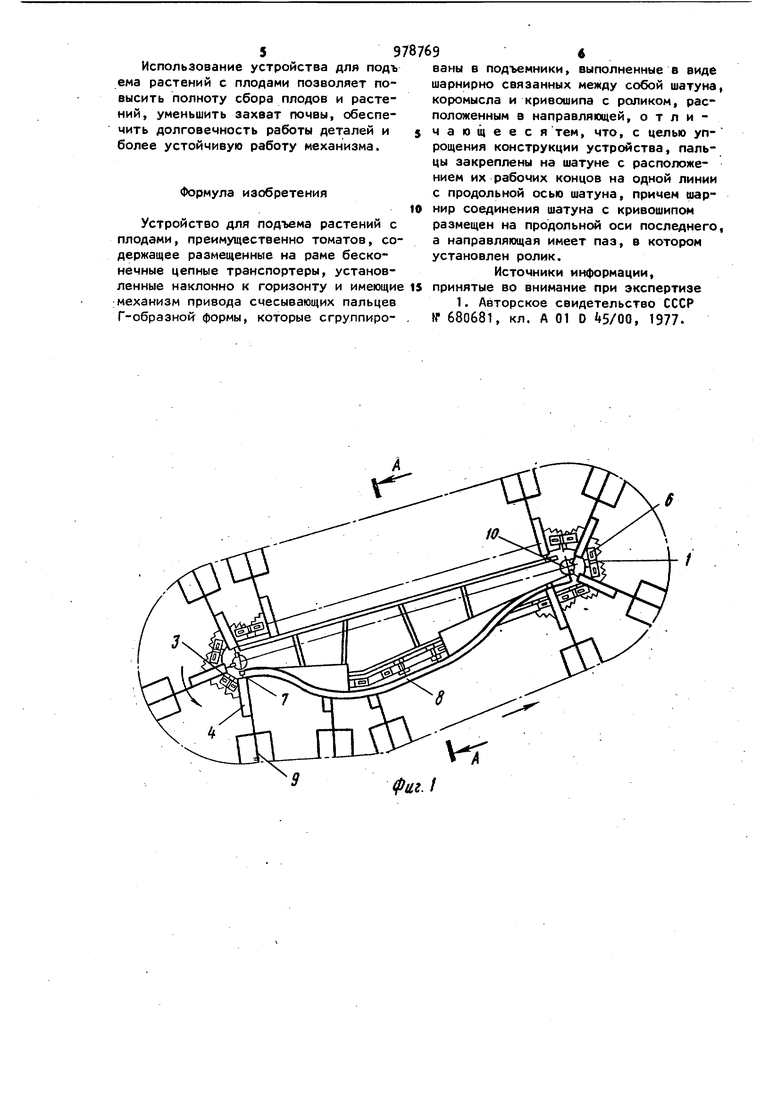
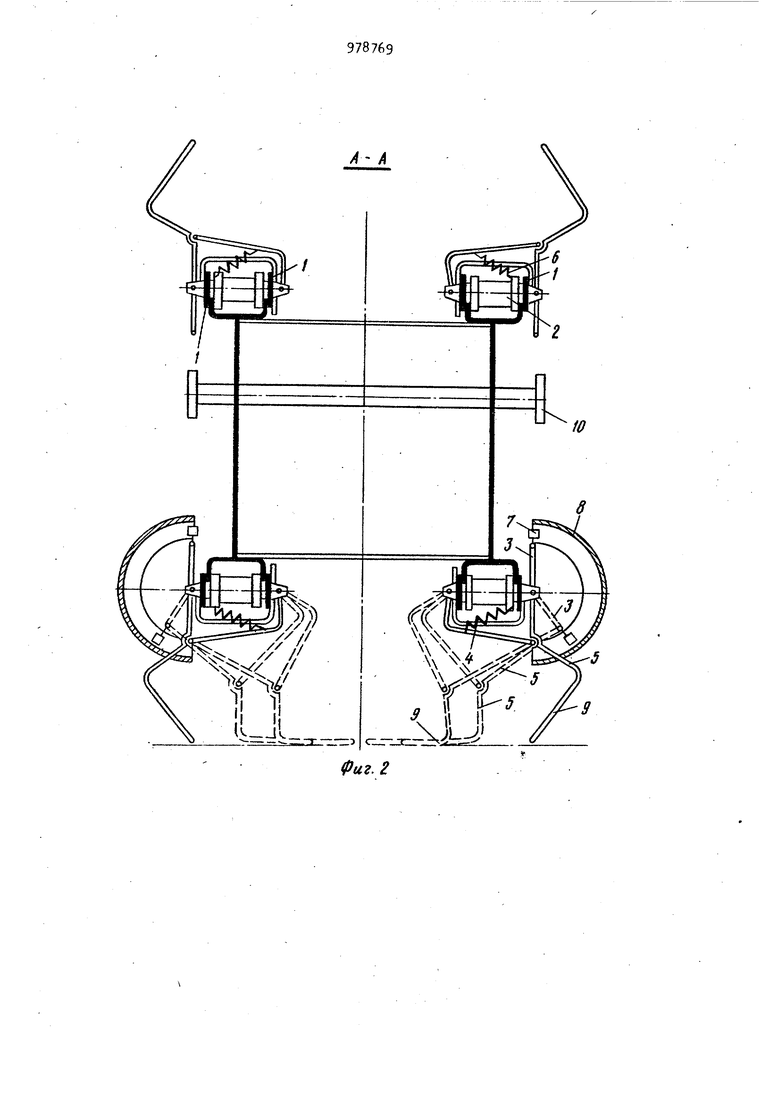
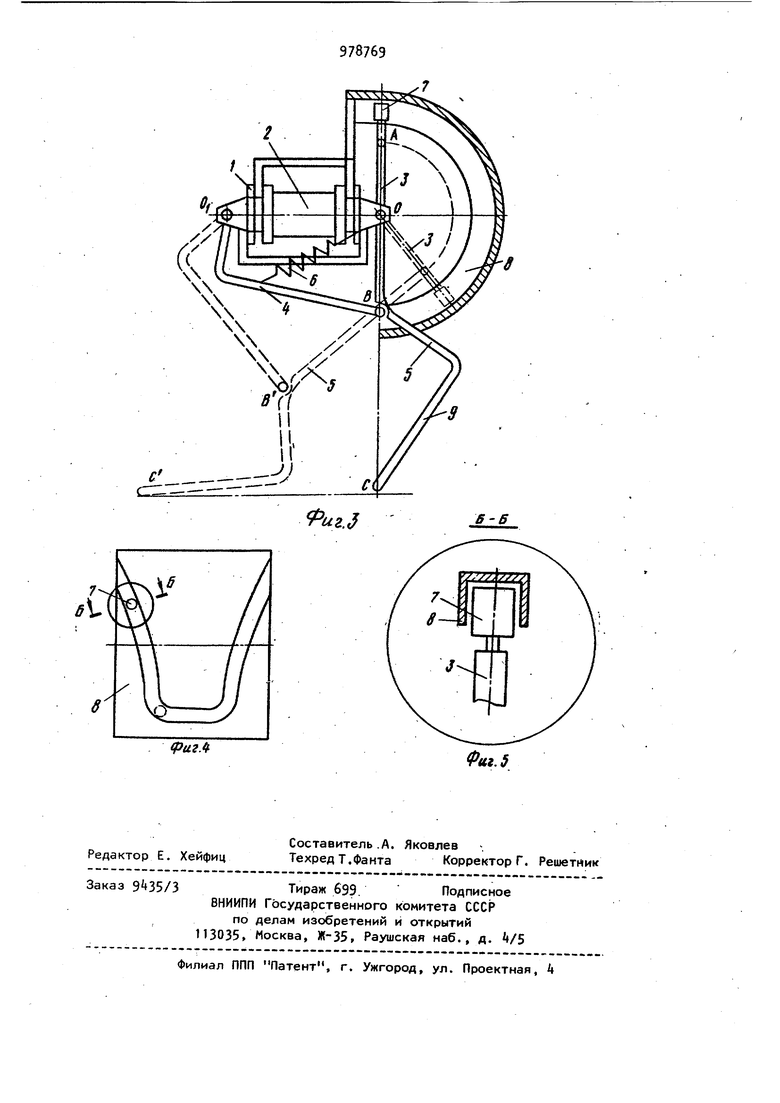
(5) УСТРОЙСТВО ДЛЯ ПОДЪЕМА РАСТЕНИЙ Изобретение относится к сельскохозяйственному машиностроению и может быть использовано в сельскохозяй ственных уборочных машинах для уборки томатов и синих баклажан. Известны устройства для подъема растений с плодами, преимущественно томатов, содержащие смонтированные на раме бесконечные цепные транспортеры, устанозленные наклонно к горИ зонту и имеющие очесывающие Г-образной формы пальцы и механизм привода транспортеров . Пальцы сгруппированы в подъемники выполненные в виде шарнирно связанны между собой кривошипа, коромысла, двух шатунов, ролика и поводка , при этом пальцы жестко прикреплены к зве ньям цепей, а на раме установлены на правляющие для перемещения роликов по заданной траектории. При движении машины нижняя ветвь цепи транспортера перемещается проти ее хода и, когда грабли в раскрытом С ПЛОДАМИ положении находятся у пов,ерхности поля, ролик начинает перемещаться по направляющем, кривошип поворачивается в плоскости, перпендикулярной рядку, заставляя грабли перемещаться к оси рядка, подбирая плоды и подгребая кусты до тех пор, пока ролик не переместится на горизонтальную часть направляющей, С этого момента куст и плоды поднимаются на некоторую высоту, находясь на граблях. После подре.зания куста ролик перемещается на наклонную часть направляющей, и грабли расходятся, давая возможность кусту с плодами упасть на элеватор. Указанные механизмы имеют сложную конструкцию, не обеспечивают надежности работы и подбора всех оторванных плодов, лежащих на поверхности поля, поднятия их вместе с кустом подмидорного растения на определенную высоту, что приводит к большим потерям урожая. 3, 97 Цель изобретения - упрощение конст рукции устройства и повышение надежности работы. Это достигается тем, что пальцы закреплены на шатуне с расположением их рабочих концов на одной линии с продольной осью шатуна, причем шарнир соединения шатуна с кривошипом размещен на продольной оси последнего, а направляющая имеет паз, в котором установлен ролик. На фиг. 1 изображена технологическая схема устройства для подъема растений с плодами; на фиг. 2 - сечение A-A на фиг. 1; на фиг. 3 - шестизвенный направляющий механизм; на фиг. 4 направляющая; на фиг. 5 сечение Б-Б на фиг. 4. Устройство для подъема растений с плодами установлено на раме, жестко скрепленной с помидороуборочной машиной, и содержит две ветви 1 цепного транспортера, на звеньях цепей которых жестко -крепятся держатели 2. К ним, как к стойке, присоединяются шар нирно кривошип 3 и коромысла . К каж дому кривошипу 3 с помощью цилиндрического шарнира присоединяется шатун 5. Шатун 5 шарниром, расположенным в середине, присоединен к коромыслу . К коромыслу i и к звену ветви 1 присоединена пружина сжатия 6. На продолжении кривошипа 3 на втулке посажен ролик 7, перемещающийся по пазу спрофилированной направляющей 8, жест ко закрепленной на раме помидороуборочной машины и обеспечивающей кинематические замыкания системы роликнаправляющая 8, причем направляющая выполнена в виде паза. Пружина 6 осуществляет силовое замыкание узла ролик-направляющая, под действием ее с помощью паза шестизвенный направляющий механизм стремится занять крайнее положение, при котором кривошип 3 находится вверху, а Г-образные пальцы 9 раскрыты (фиг. 3). Пальцы 9 закреплены на шатуне 5, при этом их рабочие концы рас положены на одной линии с продольной осью шатуна 5, причем шарнир соединения шатуна 5 с кривошипом 3 размещен на продольной оси последнего. Привод ветвей 1 цепного транспортера осуществляется посредством передачи вращения ведущей звездочки 10 от вала отбора мощности. Устройство для подъема растений с плодами р тбптает следующим образом. - J При работе машины обе ветви 1 цепного транспортера перемещаются так , что их нижние ветви движутся против хода машины. При таком движении нижних ветвей 1 цепи ролики 7 в определенный момент начинают входить в паз направляющей 8. Вход роликов 7 в паз направляющей 8 начинается в тот момент, когда раскрытые пальцы Э шестизвенных направляющих механизмов занимают горизонтальное положение, соприкасаясь с поверхностью почвы с обеих сторон рядка помидорных растений перпендикулярно их оси. Затем ролики 7 -...|,.,,,„.,.р,,, rx-xv l.i.ri -vll r-ll (.yiurjirirxflf перемещаются по специально спрофилированному пазу направляющей 8, вызывая поворот кривошипа 3 в плоскости, перпендикулярной линии движения маши ны. При.повороте кривошипа 3 вокруг оси, закрепленной в держателе 2, коромысло k поворачивается в той же плоскости, растягивая пружину 6 и увлекая за собой шатун 5- Пальцы 9 при этом перемещаются к линии посадки помидорных растений. При размерах звеньев, когда отношение длин кривошипа, коромысла, шатуна, осей равно 1:2, 5:5-2, любая точка концов пальцев 9 перемещается по поверхности поля по приближенно прямолинейной траектории, перпендикулярной направлению движения машины. Пальцы 9) сближаясь, плавно подгребают кусты с плодами, подбирая опавшие и лежащие на поверхности поля плоды, удерживая всю массу. Нижняя ветвь/у мыска машины из горизонтального положения- переходит в наклонное (фиг. 1). С момента перехода цепи в наклонное положение пальцы 9 поднимают куст со всеми плодами, в том числе и оторванными. Подъем и удерживание массы происходит до тех пор, пока куст не будет подрезан над поверхностью почвы специальным механизмом. С этого момента вся масса перемещается на пальцах 9 без прочесывания кустов в зону действия транспортеров машины, а ролик 7 попадает в нисходящий паз направляющей 8 и перемещается по нему до тех пор, пока пальцы 9 полностью не разойдутся в обе стороны, а кривошип 3 с роликом 7 займет начальное положение. В таком поло женин они вместе с звеном цепи и направляющим механизмом перемещаются до зоны расположения неубранного рядка, з.анимая исходное, положение на поверхности поля. После чего цикл повторяется. Использование устройства для подъ ема растений с плодами позволяет повысить полноту сбора плодов и растений, уменьшить захват почвы, обеспечить долговечность работы деталей и более устойчивую работу механизма. Формула изобретения Устройство для подъема растений с плодами, преимущественно томатов, со держащее размещенные на раме бесконечные цепные транспортеры, установленные наклонно к горизонту и имеющи механизм привода счесывающих пальцев Г-образной формы, которые сгруппированы в подъемники, выполненные в виде шарнирно связанных между собой шатуна, коромысла и кривошипа с роликом, расположенным в направляющей, о т л и ч а ю щ е е с я тем, что, с целью упрощения конструкции устройства, пальцы закреплены на шатуне с расположением их рабочих концов на одной линии с продольной осью шатуна, причем шарнир соединения шатуна с кривошипом размещен на продольной оси последнего, а направляющая имеет паз, в котором установлен ролик. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР « 680681, кл. А 01 D kS/QQ, 1977.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подъема растений с плодами | 1977 |
|
SU680681A1 |
| Машина для удаления растений | 1988 |
|
SU1628875A1 |
| Машина для уборки овощей | 1987 |
|
SU1729322A1 |
| МАШИНА ПОТОЧНОЙ ЛИНИИ ДЛЯ УБОРКИ КАРТОФЕЛЯ | 2000 |
|
RU2204896C2 |
| ПОМИДОРОУБОРОЧНАЯ МАШИНА | 1969 |
|
SU257197A1 |
| Режущий аппарат томатоуборочной машины | 1988 |
|
SU1724072A1 |
| Машина для уборки овощей | 1983 |
|
SU1143337A1 |
| УСТРОЙСТВО ДЛЯ УБОРКИ ПЛОДОВ ФУНДУКА | 1992 |
|
RU2076567C1 |
| Машина для уборки томатов | 1974 |
|
SU753343A3 |
| МАШИНА ДЛЯ СБОРА ПЛОДОВ С КУСТАРНИКОВ | 1967 |
|
SU194461A1 |
X - у1
uzj
Б-Б
6
рагЛ
Фиг. 5
