(54) УСТРОЙСТВО ДЛЯ ПОДЪЕМА РАСТЕНИЙ С ПЛОДАМИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подъема растений с плодами | 1980 |
|
SU978769A1 |
| Шарнирно-рычажный направляющий механизм | 1977 |
|
SU648771A1 |
| Машина для уборки ягод | 1977 |
|
SU665846A1 |
| Машина для уборки овощей | 1987 |
|
SU1729322A1 |
| Швейная машина зигзаг | 1982 |
|
SU1089188A1 |
| Лесопосадочная машина | 1947 |
|
SU76394A1 |
| Привод игольницы и отбойного бруса основовязальной машины | 1985 |
|
SU1384634A1 |
| Машина для уборки ягод земляники | 1986 |
|
SU1547763A1 |
| ПОМИДОРОУБОРОЧНАЯ МАШИНА | 1969 |
|
SU257197A1 |
| Швейная машина | 1981 |
|
SU1234480A1 |
1
Изобретение относится к сельскохозяйственному машиностроению, в частности к машинам для уборки томатов, перца и синих баклажан.
Известны машины для подъема растений с плодами, содержаш,ие смонтированные на раме бесконечные цепные транспортеры, установленные наклонно к горизонту, имеющие счесываюшие пальцы, и механизм привода транспортеров 1.
Однако такие машины не обеспечивают подбора всех оторванных плодов, лежащих на поверхности поля, и подъема из вместе с кустами растений на определенную высоту, что приводит к большим потерям урожая.
Целью изобретения является повышение полноты сбора плодов и растений и уменьшение захвата почвы.
Это достигается тем, что счесывающие пальцы имеют Г-образную форму и сгруппированы в подъемники, выполненные в виде кинематически связанных между собой кривошипа, коромысла, двух шатунов, ролика и поводка, при этом пальцы жестко прикреплены к звеньям цепей, а на раме
установлены направляющие для перемещения роликов по заданной траектории.
С целью обеспечения перемещения пальцев в направлении, перпендикулярном движению транспортеров, кривощип выполнен
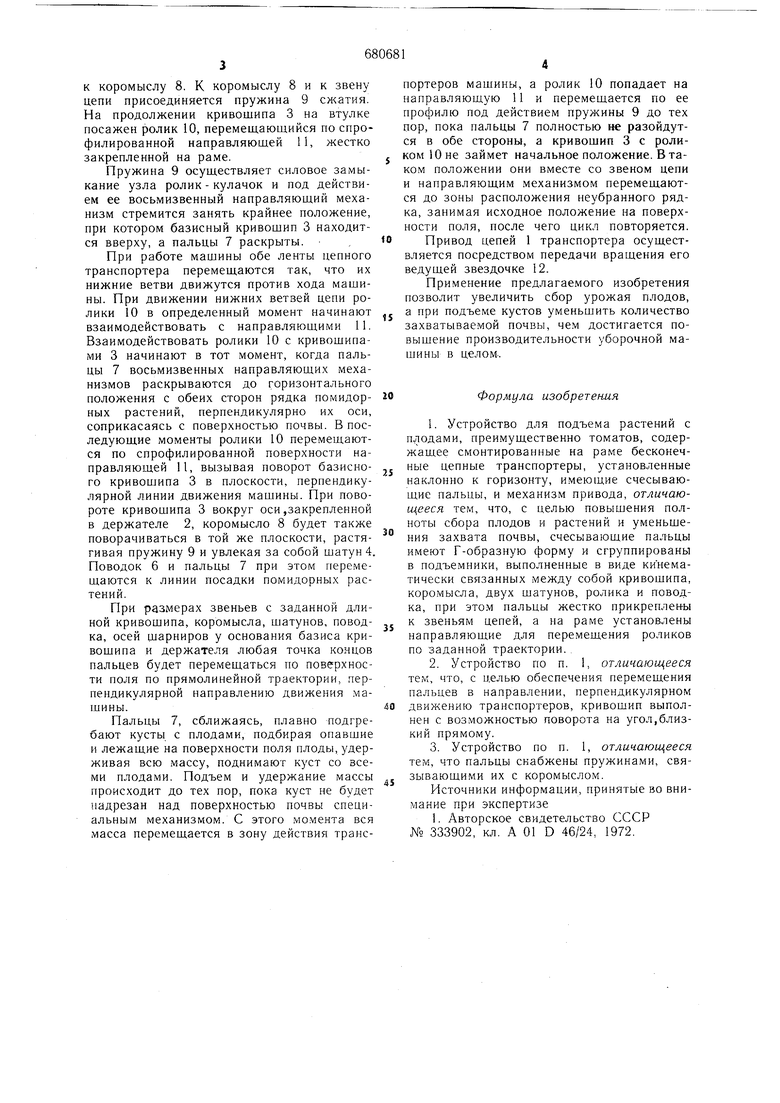
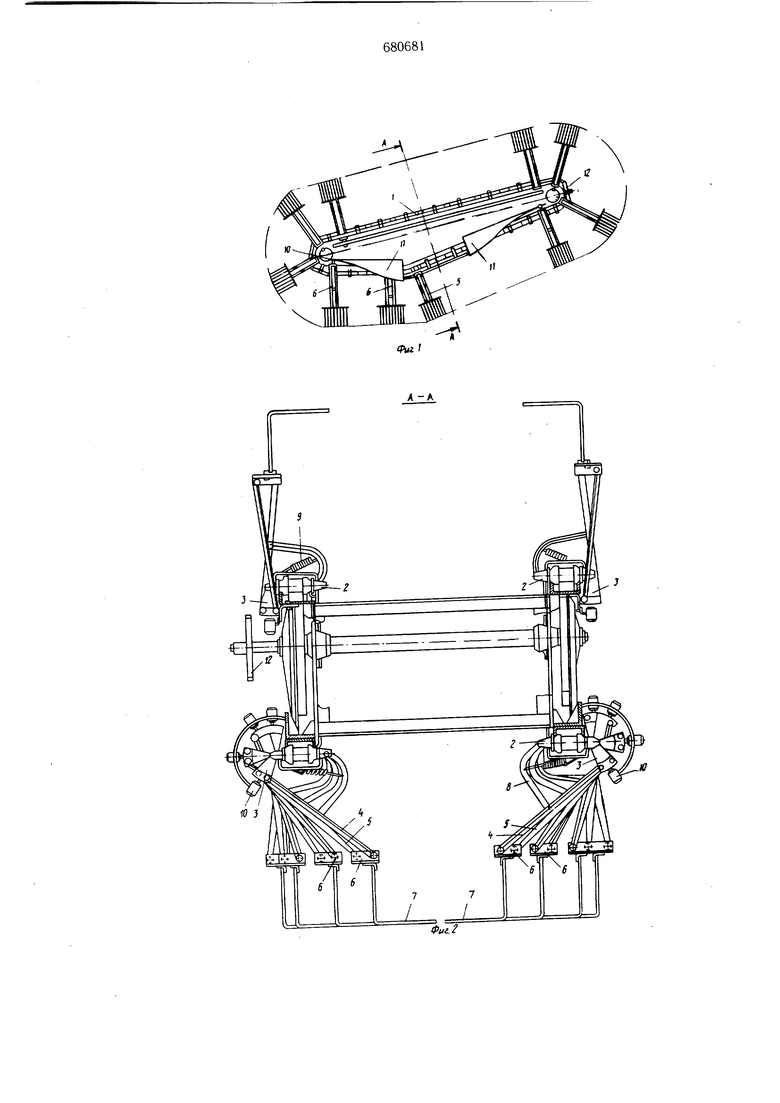
с возможностью поворота на угол, близкий прямому. Кроме того, пальцы снабжены пружинами, связывающими их с коромыслом. На фиг. 1 изображена с.хема устройства, вид сбоку; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - восьмизвенный направляющий механизм счесывающих пальцев.
Устройство установлено на раме, жестко соединенной с помидороуборочной машиной и содержит две ветки 1 цепного транспортера, на звенья цепей которых жестко
крепятся держатели 2. К пальцам держателя 2, как к стойке, присоединяются щарнирно-базисные кривощипы 3 и коромысло. К каждому базисному кривошипу 3 с помощью цилиндрических шарниров присоединяются по два шатуна 4 и 5. Вторыми
концами шатуны 4 и 5 соединяются посредством шарниров с поводком 6, к которому жестко крепятся Г-образные пальцы 7. Шатун 4 средним шарниром присоединен к коромыслу 8. К коромыслу 8 и к звену цепи присоединяется пружина 9 сжатия. На продолжении кривошипа 3 на втулке посажен ролик 10, перемещающийся по спрофилированной направляющей 11, жестко закрепленной на раме. Пружина 9 осуществляет силовое замыкание узла ролик - кулачок и под действием ее восьмизвенный направляющий механизм стремится занять крайнее положение, при котором базисный кривощип 3 находится вверху, а пальцы 7 раскрыты. При работе мащины обе ленты цепного транспортера перемещаются так, что их нижние ветви движутся против хода машины. При движении нижних ветвей цепи ролики 10 в определенный момент начинают взаимодействовать с направляющими 11. Взаимодействовать ролики 10 с кривошипами 3 начинают в тот момент, когда пальцы 7 восьмизвенных направляющих механизмов раскрываются до горизонтального положения с обеих сторон рядка помидорных растений, перпендикулярно их оси, соприкасаясь с поверхностью почвы. В последующие моменты ролики 10 перемещаются по спрофилированной поверхности направляющей 11, вызывая поворот базисного кривошипа 3 в плоскости, перпендикулярной линии движения мащины. При повороте кривощипа 3 вокруг оси,закрепленной в держателе 2, коромысло 8 будет также поворачиваться в той же плоскости, растягивая пружину 9 и увлекая за собой шатун 4 Поводок 6 и пальцы 7 при этом перемещаются к линии посадки помидорных растений. При размерах звеньев с заданной длиной кривошипа, коромысла, шатунов, поводка, осей шарниров у основания базиса кривошипа и держателя любая точка концов пальцев будет перемещаться по поверхности поля по прямолинейной траектории, перпендикулярной направлению движения машины. Пальцы 7, сближаясь, плавно подгребают кусты с плодами, подбирая опавшие и лежащие на поверхности поля плоды, удерживая всю массу, поднимают куст со всеми плодами. Подъем и удержание массы происходит до тех пор, пока куст не будет надрезан над поверхностью почвы специальным механизмом. С этого момента вся iMacca перемещается в зону действия транспортеров машины, а ролик 10 попадает на направляющую 11 и перемещается по ее профилю под действием пружины 9 до тех пор, пока пальцы 7 полностью не разойдутся в обе стороны, а кривошип 3 с роликом 10 не займет начальное положение. В таком положении они вместе со звеном цепи и направляющим механизмом перемешаются до зоны расположения неубранного рядка, занимая исходное положение на поверхности поля, после чего цикл повторяется. Привод цепей 1 транспортера осуществляется посредством передачи вращения его ведущей звездочке 12. Применение предлагаемого изобретения позволит увеличить сбор урожая плодов, а при подъеме кустов уменьшить количество захватываемой почвы, чем достигается повышение производительности уборочной машины в целом.. Формула изобретения 1.Устройство для подъема растений с плодами, преимушественно томатов, содержашее смонтированные на раме бесконечные цепные транспортеры, установленные наклонно к горизонту, и.меющие счесывающие пальцы, и механизм привода, отличающееся тем, что, с целью повышения полноты сбора плодов и растений и уменьшения захвата почвы, счесывающие палъцы имеют Г-образную форму и сгруппированы в подъемники, выполненные в виде кинематически связанных между собой кривошипа, коромысла, двух шатунов, ролика и поводка, при этом пальцы жестко прикреплены к звеньям цепей, а па раме установлены направляюшие для перемещения роликов по заданной траектории., 2.Устройство по п. 1, отличающееся тем, что, с целью обеспечения перемещения пальцев в направлении, перпендикулярном движению транспортеров, кривошип выполнен с возможностью поворота на угол,близкий прямому. 3.Устройство по п. 1, отличающееся тем, что пальцы снабжены пружинами, связываюшими их с коромыслом. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 333902, кл. А 01 D 46/24, 1972.
А -А
Фиг. г
11
