Изобретение относится к машиностроению и может быть использовано (В устройствах для удержания под нагрузкой канатов, проводки, ленты и тому подобных изделий.
Известен зажим для каната, содержащий корпус с клиновым пазом и расположенным в нем составным клином, охватывае1 /им фиксатором в виде пластинчатой скобы с овальными сквозными отверстиями на концах, в которые входит клиновой вкладыш, позволяющий управлять зажимом дистанционно
Однако в известном зажиме не обеспечивается освобождение каната под нагрузкой.
Целью изобретения является повышение надежности работы устройства.
Для достижения этой цели устройство для зажима каната с дистанционным управлением, содержащее корпус с клиновым пазом, составной клин с пазами для каната и спусковой дистанционный механизм, снабжено двумя дополнительными клиньями, охватывгаощими составной клин, подвижными упорс1ми, имеющими возможность взаимодействия с дополнительными клиньями, системой рычагов, посаженных на вал .С нормально замкнутыми тормозньми
устройствами, при этом спусковой механизм связан с подвижными упорами системой рычагов, а вершина клинового паза корпуса направлена противоположно подвижным упорам.
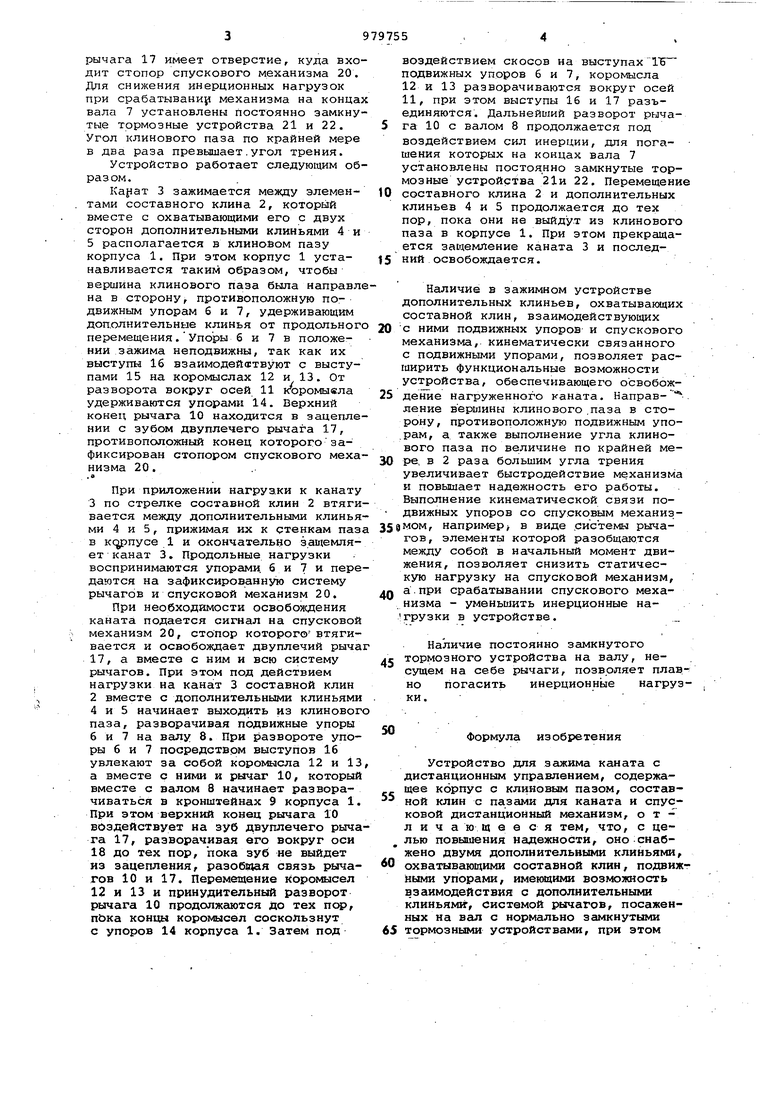
На чертеже изображено зажимное устройство, общий вид.
Устройство состоит из корпуса 1, в клиновом пазу которого расположен составной клин 2 с пазс1ми для каната 3, зажатого между элементами клина-2. По обе стороны составного клина размещены дополнительные клинья 4 и 5, с торцами которых взаимодействуют упоры 6 и 7, подвижно установленные на валу 8, который, в свою очередь, подвижно установлен в кронштейнах 9 корпуса 1, На валу 8 жестко закреплён рычаг 10, несущий на себе подвижно установленные на осях 11 коромысла 12 и 13. Одни концы коромысел опираются на упоры 14 корпуса 1, а противоположные выступами 15 взаимодействуют с
25 выступами 1б на подвижных упорах б и 7. При &ТОМ;свободный конец,рычага 10 находится в зацеплении с зубом двуплечего гмачага 17, установленного на оси 18 в проушинах 19 корпуса 1.
30 Противоположный конец двуплечего
рычага 17 имеет отверстие, куда входит стопор спускового механизма 20, Для снижения инерционных нагрузок при срабатывание механизма на концах вала 7 установлены Постоянно замкнутые тормозные устройства 21 и 22. Угол клинового паза по крайней мере в два раза превьлшает. угол трения.
Устройство работает следующим образом.
Карат 3 зажимается между элементами составного клина 2, который вместе с охватывающими его с двух сторон дополнительными клиньями 4 и 5 располагается в клиновом пазу корпуса 1. При этом корпус 1 устанавливается таким образом, чтобы вершина клинового паза была направлена в сторону, противоположную подвижным упорам 6 и 7, удерживающим дополнительные клинья от продольного перемещения. Упоры 6 и 7 в положении зажима неподвижны, так как их выступы 16 взаимодейсЕтвуют с выступами 15 на коромыслах 12 и 13. От разворота вокруг осей 11 кЪромывла удерживаются упорами 14. Верхний конец рычага 10 находится в зацеплении с зубом двуплечего рычага 17, противоположный конец которого зафиксирован стопором спускового механизма 20.
. 9
При приложении нагрузки к канату
3по стрелке составной клин 2 втягивается между дополнительными клиньями 4 и 5 , прижимая их к стенкам паза в корпусе 1 и окончательно защемляет канат 3, Продольные нагрузки воспринимаются упорами, б и 7 и передаются на зафиксированную систему рычагов и спусковой механизм 20.
При необходимости освобождения каната подается сигнал на спусковой механизм 20, стопор которого втягивается и освобождает двуплечий рычаг 17, а вместе с ним и всю систему рычагов. При этом под действием нагрузки на канат 3 составной клин 2 вместе с дополнительными клиньями
4и 5 начинает выходить из клинового паза, разворачивая подвижные упоры
б и 7 на валу 8. При развороте упоры б и 7 посредством выступов 16 увлекают за собой коромысла 12 и 13 а вместе с ними и рычаг 10, который вместе с валом 8 начинает разворачиваться в кронштейнах 9 корпуса 1. При этом верхний конец рычага 10 воздействует на зуб двуплечего рычага 17, разворачивая его вокруг оси 18 до тех пор, пока зуб не выйдет из зацепления, разобщая связь рычагов 10 и 17. Перемещение коромысел 12 и 13 и принудительный разворот рычага 10 продолжгиотся до тех пар, пЬка концы коромысел соскользнут с упоров 14 корпуса 1. Затем под
воздействием скосов на выступах Т6 подвижных упоров б и 7, коромысла 12 и 13 разворачиваются вокруг осей 11, при этом выступы 16 и 17 разъединяю ся. Дальнейи1ий разворот рычага 10 с валом 8 продолжается под воздействием сил инерции, для погашения которых на концах вала 7 установлены постоянно замкнутые тормозные устройства 21и 22. Перемещение
составного клина 2 и дополнительных клиньев 4 и 5 продолжается до тех пор, пока они не выйдут из клинового паза в корпусе 1. При этом прекращается защемление каната 3 и последНИИ освобождается.
Наличие в зажимном устройстве дополнительных клиньев, охватывающих составной клин, взаимодействующих
С ними подвижных упоров и спускового механизма, кинематически связанного с подвижными упорами, позволяет расширить функциональные возможности устройства, обеспечивающего освобождение нагруженного каната. Каправление вершины клинового .паза в сторону, противоположную подвижным упо.рам, а также выполнение угла клинового паза по величине по крайней мере, в 2 раза большим угла трения
увеличивает быстродействие механизма и повышает надежность его работы. Выполнение кинематической связи подвижных упоров со спусковым механизмом, например , в виде системы рычагов, элементы которой разобщаются между собой в начальный момент движения, позволяет снизить статическую нагрузку на спусковой механизм,
а.при срабатывании спускового механизма - уменьшить инерционные на грузки в устройстве.
Наличие постоянно замкнутого тормозного устройства на валу, несущем на себе рычаги, позволяет плавно погасить инерционные нагрузки.
Формула изобретения
Устройство для зажима каната с истанционным управлением, содержащее корпус с клиновым пазом, составной клин с пазами для каната и спусковой дистанционный механизм, о т л и ч а ю щ веся тем, что, с целью повышения надежности, оно снабжено двумя дополнительными клиньями,
охватывающими составной клин, подвижными упорами, имеющими возможность взаимодействия с дополнительными клиньями, системой рычагов, посаженных на вал с нормально замкнутыми
тормозными устройствами, при этом
спусковой механизм связан с подвижными упорами системой рычагов, а вершина клинового паза корпуса направлена противоположно подвижным упорам.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР №666334, кл. F 16 G 11/04, 1977 прототип).
19
18
17
W
22
6 8

| название | год | авторы | номер документа |
|---|---|---|---|
| СТРЕЛКОВОЕ ОРУЖИЕ | 2009 |
|
RU2387942C1 |
| АГРЕГАТ ДЛЯ УКЛАДКИ ОПТОВОЛОКОННОГО КАБЕЛЯ НА ПРОВОД ВОЗДУШНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ | 1996 |
|
RU2124256C1 |
| СПАРЕННАЯ УСТАНОВКА ДЛЯ ЗАПУСКА ЗЕНИТНЫХ РАКЕТ ИНДИВИДУАЛЬНОГО ПОЛЬЗОВАНИЯ | 1995 |
|
RU2088877C1 |
| Аппарат выключки матрично-клиновых строк в наборной строкоотливной машине | 1982 |
|
SU1100133A1 |
| СВЕТОЗАЩИТНОЕ УСТРОЙСТВО | 1993 |
|
RU2054115C1 |
| Станок для обработки графитированныхэлЕКТРОдОВ | 1979 |
|
SU841993A1 |
| МЕХАНИЗМ ЗИГЗАГА ШВЕЙНОЙ МАШИНЫ | 1990 |
|
RU2007505C1 |
| Исполнительный орган фронтального агрегата | 1991 |
|
SU1810530A1 |
| УПОР ДЛЯ СТРЕЛЬБЫ ИЗ АВТОМАТИЧЕСКОГО СТРЕЛКОВОГО ОРУЖИЯ | 1999 |
|
RU2166165C1 |
| Устройство для подачи полосового и ленточного материала в рабочую зону пресса | 1986 |
|
SU1349853A1 |
