Изобретение относится к автоматике, в частности робототехнике, и может быть использовано для автоматического сбора информации о рельефе местности. Известны способы автоматического измерения координат точек поверхности, основанные на измерении параллак са точек исследуемой поверхности при наличии базового расстояния между двумя измерительными блоками. Отличительной особенностью этих способов является необходимость автоматической идентификации измеряемых точек, т.е. отыскания двух соответствующих изображений одного измеряемого элемента поверхности 1. Недостатком известных способов является зависимость точности измере ния от условий освещенности измеряемого объекта и его отражающих свойст Наиболее близким к изобретению является способ стереотелевизионного измерения, в котором при введени искусственного подсвета элементов поверхности сканирунмцим лучом указанный недостаток устраняется. Суть известного способа заключается в том, что каждый измеряемый элемент исследуемой поверхности последовательно, один за другим, вые-вечивают узконаправленным световым лучом, пересекающим линию базиса стереосистемы в одной и той же точке, линейный параллакс каждой высвеченной точки измеряют в плоскости,проходящей через линию базиса и световой луч, а результаты измерения используют для вычисления пространственных координат поверхности измеряемого объекта С2. Недостаток известного способа состоит в невысокой скорости процесса получения сигналов, несущих информацию о координатах поверхности,особенно при использовании электроме|ханического сканирования, что препятствует его использованию в тех
случаях, когда обзорно-информационная система перемещается относительно объекта измерения, поскольку при этом в информационном сигнале возникают такие динамические погрешности измерения, которые приводят к искажению геометрической формы объекта измерения в целом.
Целью изобретения является повышение точности определения координат перемещающегося объекта.
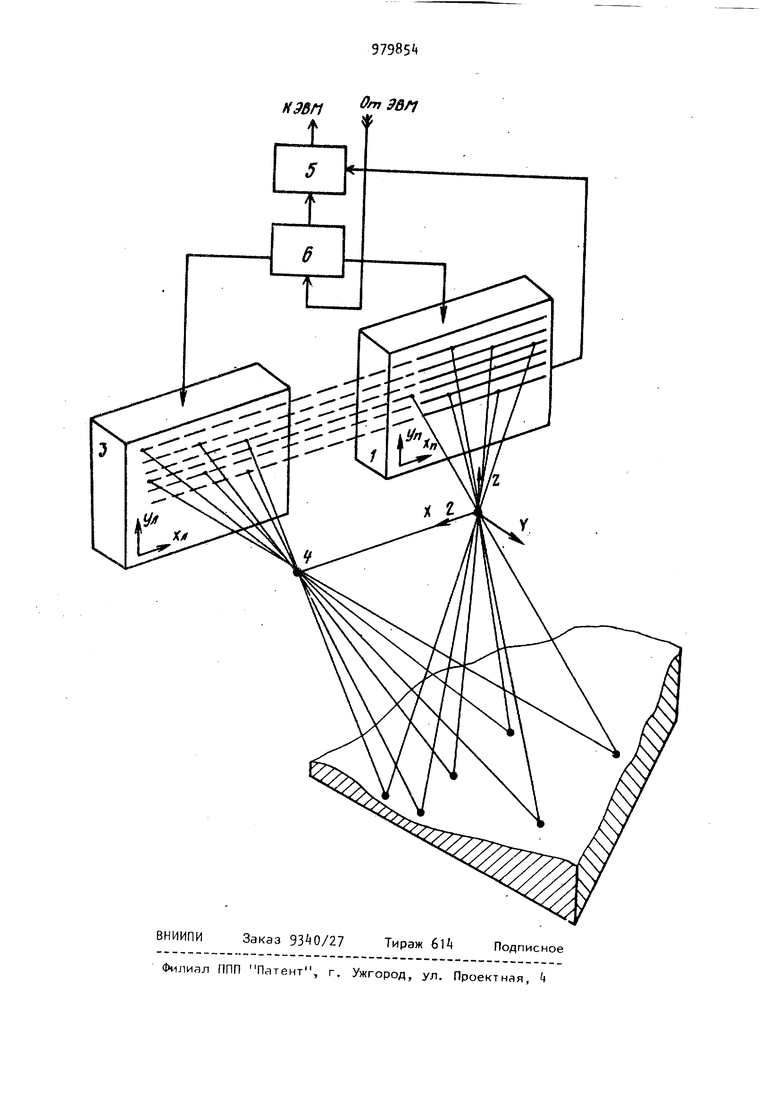
Поставленная цель достигается тем, что согласно способу определения координат поверхности объекта, включающему импульсное высвечивание каждой измерительной точки узконаправленным световым лучом, пересекающим линию базиса стереосистемы в одной и той же точке, измерение линейного параллакса каждой высвеченной точки в плоскости, проходящей через линию базиса и световой луч, и вычисление пространственных координат измери тельной точки, все измерительные точки высвечивают одновременно пучком 25 световых лучей, причем в каждой плос кости измерения линейного параллакса находится не более одного светового луча. Указанное расположение лучей дает возможность одновременно принять некоторое множество информационных сиг налов, полученных за время одного св тового импульса. Изобретение позволяет проводить параллельную обработку одновременно принятых информационных сигналов при условии использования числа измерив тельных каналов, равного числу измеряемых точек. Это открывает путь к существенному ускорению всего процесса измерения с максимально возмож ным выигрышем в Л раз, где А - число точек измерения. Использование изобретения в условиях относительного перемещения измеряемого объекта и об зорно-информационной системы в процессе измерения обеспечивает стацио мерный характер погрешностей. На чертеже приведена блок-схема устройства для реализации предлагаемого способа. Устройство содержит светочувствительный элемент 1, расположенный в фокальной плоскости объектива 2, источник 3 подсвета, оптический цент t которого удален на базисное рассто яние от оптического центра объектива 2, измерительный блок 5, подключенный к выходу светочувствительного элемента 1, и блок 6 управления, подключенный к источнику 3 подсвета, светочувствительному элементу 1 и
измерительному блоку 5Источник 3 подсвета состоит из элементарных излучателей,имеющих узкую диаграмму направленности и расположенных так, чтобы их центральные лучи при попадании на исследуемую поверхность пересекались в оптическом центре источника 3 подсвета.
Кроме того, элементарные излуча- тели должны быть расположены так,чтобы при пересечении объема источника 3 подсвета пучком плоскостей, в которых измеряется линейний параллакс высвеченных точек, в каждой плоскости сечения находился только
один элементарный излучатель.
Светочувствительный элемент 1, выполненный в виде матрицы на приборе с зарядовой связью, имеет строчную структуру и расположен так. что строки его параллельны линии базиса и лежат на линиях пересечения светочувствительной матрицы с плоскостями линейного параллакса. Благодаря описанному расположению элементарных излучателей источника подсвета и строксветочувствительно го элемента в плоскости измерения линейного параллакса каждой высвег ченной точки будут лежать элементарный излучатель, высветивший эту точку, и одна из строк светочувствительного элемента. Таким образом, на . каждую строку светочувствительного элемента попадает информационный сиг нал только от одной высвеченной точки, что обеспечивает возможность од-i новременной обработки стольких информационных сигналов, сколько строк содержится в светочувствительнс 1. элементе. Это же условие определяет и возможное количество одновременно высвечиваемых точек и, в конечном счете, количество элементарных излучателей в источнике подсвета. Устройство работает следующим образом. По команде от ЭВМ блок 6 управления формирует импульсы управления работой измерительного блока 5, источника 3 подсвета и светочувствительного элемента 1. При этом производится включение элементарных излучателей источника 3 подсвета, лучи от которого, пройдя через оптический центр I источника подсвета, падают на исследуемую поверхность. Благодаря описанной геометрии взаимного расположения источника 3 подсвета и светочувствительного элемента 1 на каждую из строк попадает по одной точке - изображению. Измерительный блок 5 производит считывание и обработку информации со светочувствительного элемента 1.
На чертеже показаны три прямоугольные системы координат Хд УЛ связанная с источником 3 подсвета; Хп, - связанная со светочувствительным элементом 1 и X , У, Z - пространственная, связанная с измерителем координат, например с его объективом k. Для каждой из светящихся точек источника 3 подсвета и соответствующей ей освещенной точки светочувствительного элемента 1 измерительный блок формирует тройку чисел (Хл, Хп, Хд). Тройки чисел (Уд, Х,,, Хд), однозначно определяющих координаты точек, высвечиваемых на прверхности, передаются в ЭВМ. В ЭВМ по известным фотограмметрическим формулам производится вычисление трех пространственных координат (Х,У,2) всех точек исследуемой поверхности. Причем этот процесс вычислен1Л существенно упрощается, так как координаты Ху, У/у 1элемёнтарных излучателей можно заложить в ЭВМ в виде констант.
возможность одновременного высвечивания нескольких точек с использо- ванием всех излучателей и параллель(Ная обработка информации от многострочного, светочувствительного элемента приводят к повышению быстродействия предлагаемого устройства. Особую важность положительный эффект быстродействия приобретает в том случае, если измеритель используется на подвижной транспортной машине, ;когда в процессе непрерывного перемещения обзорно-информационной системы
относительно объекта измерения образуются динамические искажения. В этом случае существенную роль играет одновременность ввода всей информации. При использовании безинерционных светочувствительных матриц ПЭС с быстрым переносом зарядов в защиценную от света область время ввода информации может составлять доли микросекунды в соответствии с длительностью импульсов подсвета.
Формула изобретения
Стереометрический способ определения координат поверхности объекта, включающий импульсное высвечивание каждой измерительной точки узконаправленным световым лучом, пересекающим линию базиса стереосистемы в одной и той же точке, измерение линейного параллакса каждой высвечен ной точки в плоскости, проходящей через линию базиса и световой луч, и вычисление пространственных координат измерительной точки, отличающийся тем, что, с целью повышения точности определения координат перемещающегося объекта, все измерительные точки высвечивают одновременно пучком световых лучей, причем в каждой плоскости измерения линейного параллакса находится не более одного светового луча.
Источники информации, принятые во внимание при экспертизе
1.Катыс Г.П. Оптические и информационные системы роботов-манипуляторов. Машиностроение, 1977, c.2i45-250.
2,Козлов Б.Л.,Лупичев Л.Н., Орел Е.Н.,Ходарев Ю.К., Шаманов И.В. Об одном методе построения системы управления самоходными аппаратами. Доклад на XXI конгрессе МАФ, Констанца, 1971 (прототип).