(54) СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ АНАЛОГОВЫХ ИНТЕГРАЛЬНЫХ МИКРОСХЕМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ разбраковки полупроводниковых приборов и микросхем | 1990 |
|
SU1714541A1 |
| Устройство для контроля выходных параметров электронных схем | 1981 |
|
SU954904A1 |
| СИСТЕМА И СПОСОБ ИДЕНТИФИКАЦИИ ПОЛЬЗОВАТЕЛЕЙ ЭВМ (ВАРИАНТЫ) | 2011 |
|
RU2459252C1 |
| Способ обнаружения и локализации подвижных источников ионизирующих излучений | 2018 |
|
RU2680671C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕХОДНОЙ ХАРАКТЕРИСТИКИ ЦИФРОВЫХ ИНТЕГРАЛЬНЫХ МИКРОСХЕМ | 2020 |
|
RU2766066C1 |
| Способ регулирования электропотребления в энергосистемах с вентильными преобразователями | 1987 |
|
SU1700679A1 |
| Устройство для контроля и управления насосной установкой гидротранспортной системы | 1980 |
|
SU882895A2 |
| Устройство для контроля параметров линейных интегральных микросхем | 1981 |
|
SU981906A1 |
| Устройство для контроля канала связи | 1987 |
|
SU1478351A1 |
| Способ автоматического контроля параметров технологического процесса | 1987 |
|
SU1562930A1 |
1
Изобретение относится к контрольноизмерит льной технике и может быть использовано при контроле параметров аналоговых интегральных микросхем и мик- росборок.
Известен способ контроля параметров линейных интегральных микросхем, заключающийся в подаче на вход испытуемой микросхемы стимулирующего воздействия и измерений параметра. При этом о годности интегральной схемы по контролируемому параметру судят по измеренному значению последнего 1
Этот способ имеет низкое быстродействие из-за больщого времени контроля интегральных микросхем, имеющих бопьщое число параметров.
Наиболее близким техническим рещением к предлагаемому является способ проверки выходного параметра электронных схем, заключающийся в том, что на вход контролируемой и эталонной микросхем подают стимулирующее воздействие и сравнивают выходные сигналы контролируемой и эталонной микросхем в заданные интервалы времени 2 J .
Однако согласно , известному способу контролируется количество значений выходного сигнала контролируемых интегральных схем, лежащих за пределами допуска на параметр к не учитывается величина отклонения значений параметра от .эталонных или допустимых значений.
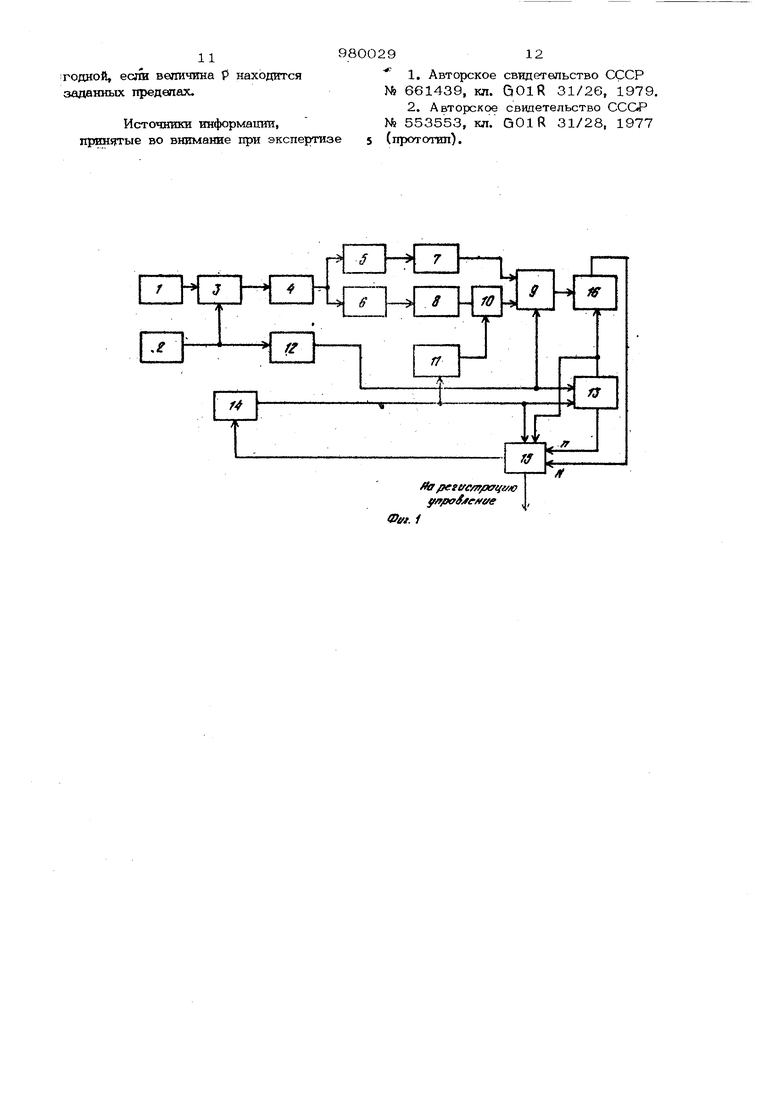
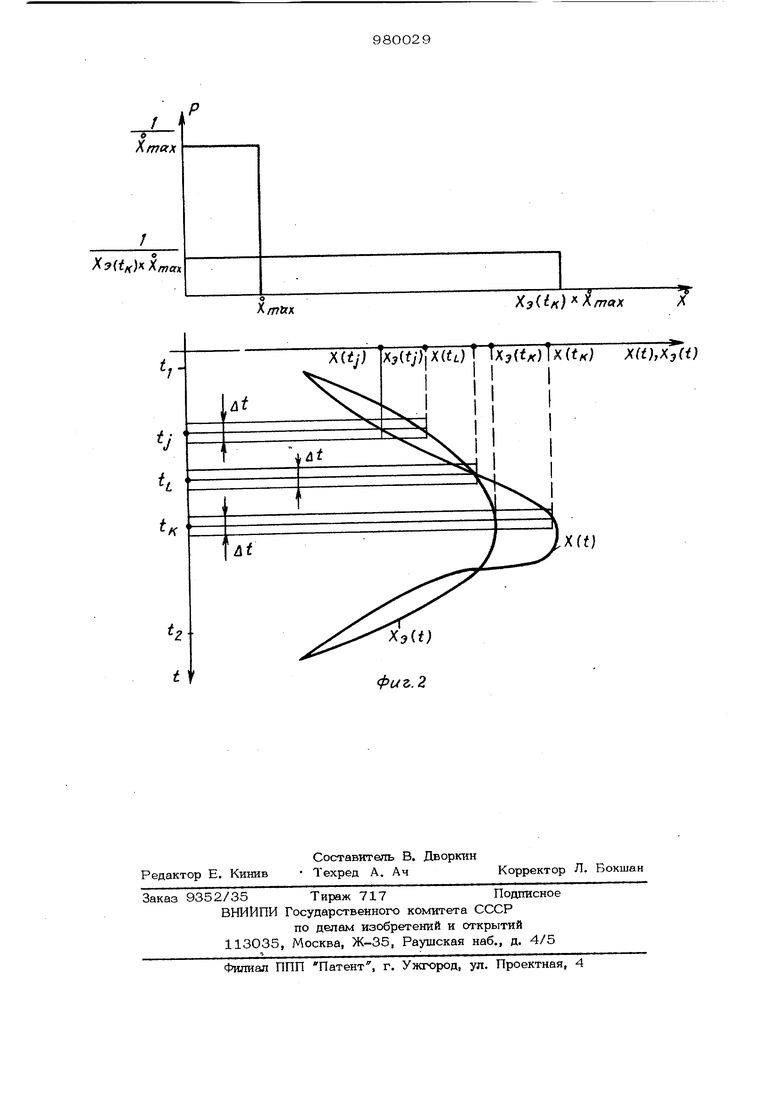
Допустим исследуемые выходные сигналы двух контролируемых интегральных схем превышают верхнюю возможную границу параметра в заданный интершал времени, но один из них лищь незначительно отличается (0,1-0,2%) от допустимых значений, а другой имеет значительные отклонения (5-10%) при наличии во втором высших гармоник, сильно искажающих форму сигнала. При контроле по известному способу различий между исследуе,мыми схемами выявлено не будет, и информация об количественном значении отклонения испытуемьтх сигналов от этащими нижнему и верхнему допустимым значениям отклонения мгновенного значения выходного сигнала контролируемо схемы от эталонного, формируемого эта лонной схемой в данном временном инте вале A-ti и равными соответственно. I. - . S I - I -IH ) (-к ) мглкг 1 макс e(-ti) 9,) где дХ (-t ) нижнее допустимое знач ние отклонения выходног сигнала контролируемой схемы от эталонного в -i -м интервале (ЛЬ; ), ДУ„ (tJ) - верхнее допустимое знач ние отклонения выходног сигнала контролируемой схемы от эталонного в i -м интервале (Л ), X fL.) - мгновенное значение эта лонного сигнала в 1 -м интервале ( Д Ь ) (выход ного сигнала эталонной схемы), f(,) значение относительного fci ) отклонения выходного си нала контролируемой схе мы от эталонного в -i -м интервале ( Д t ); uXCti ) - значение отклонения выходного сигнала контрол руемой схемы от эталон ного в -i -м интервале (л-ь. Если окажется, что р. . ДЛЯ всех временных интервалов, в течение времени контроля, то схема признается годной, в противном случае схема признается не годной, а значение относительного отклонения cf (..{ мгновенного значения выходного сигнала контрол руемой схемы от эталонного для i -го интервала Д-t равняется (5 Ct i) PI где Р:; - значение величины Р для -i -го интервала. На фиг. 2 приведены графшт, поясня щие сущность предлагаемого способа. Необходимо, чтобы внутренние параметры схемы были такими, что выходно сигнал контролируемой схемы находился 29 в зоне определяемой верхним ДХ (-1 и нижним А Х.,(-у допустимыми отклонениями от эталонного сигнала, формируемого эталонной схемой, причем AX(t)--XCt)-X9tU, а для i -го интервала AX(.t) (i:i)-X3(ti). Т.е. для каждого временного интервала ДТ,; должно выполняться неравенство дХц(-ь)дха)лХаа). На временном отрезке -Ь,-Ь2Кфйг.2)1, равном времени контроля и на котором определены параметры контролируемой схемы, рассмотрим достаточно малые интервалы времени Д-t , соответствующие 1 -му моменту времени -Ь , в течение которых изменение значений выходных сигналов эталонной и контролируемой схем незначительны, или можно пренебречь и принять значений выходных сш налов постоянными и равными соответственно ХэН)и x(-ti ) Как видно из графиков на фиг. 2 для интервалов Д-fc , в которых мгновенные значения выходного сигнала ;(-t) контротгаруемой схемы превыщают мгновенные значения выходного сигнала y{-k) эталонной , т.е. X (-1) 7 Хэ (t- (например, для , т.е. Дt) вероятность Р превышения случайным сигнал ом XX9(i; значения X Н) - X (tit) .равного значению выходного сигнала контролируемой схемы в интервале Atj в момент выборки рав-на величине Р,()(к.)ХлАакс -{ xio - Х9(Ьк.)Х ууОкс-Х(к) .р /.,) V гС W1 и равна О, если X Ci) Хд .t) Если X (-t) - X 3 в рассматриваемом интервале времени, например для интервала ЛС(, , то вероятность р -. )Хмд1сс-х(ь) . ХЛ.)(ллакс.-0, ); --const--РО --PI(X) 7 Если X t,-fc) Хэ (jc.) для рассматриваемо интервала (например, для -i- j , т.е. A-t| , то вероятность Р-1 : aa;,)CN4QKc- eij),o р. W7p, ) Х лсакс Для произвогаьного интервала Д -t и р - ХСЬт) 9 / : -. УЭ (i)y OKC-il 3 i))l . ).g(i)X lyvCJKC Для величины р-рр-р можно запис P-VPiH- - r.AMtiM. .L )-:,{Ъ) 3 XCt X C-t Рар -р Z т.е. величина О S «Ь NVOKt Э прямо Пропорциональна величине относительного отклонения vt.- ) , ) yfJ.. Э. значений выходного сигнала контролируемой схемы от эталонного Xgli-H) в рас матриваемом интервале. Для предельных значений отклонения выходного сигнала контролируемой схемы в t-м интервале I Xu(-fci) При условии, iTo X(i.)xCi)Xe(tO Таким образом, если , то р рассматриваемся интервале Л-1 значение выходного сигнала Х(Ь)лежит в зоне определяемой нижним ЛУ„()и вер ним Д X в (t ) допустимым отклонением. зн чения выходного сигнЕита контролируемо схемы от эталонного, причем, если Р О то Ха)--Хэ(1) При этом дX,()дXьet). 9 Если неравенство p-g выполняется для всех временных интервалов, то это значит, что для всех временных интервалов Л-ti выполняется неравенство лХ(Ъ),)) т.е. схема годна. В предлагаемом способе осуществляется статистическое определение величины путем К -кратного сравнения между собой в совпадающие моменты значений выходного сигнала X контролируемой схемы и промодулированного случайного сигнала подсчета числа случаев N , когда значения промодулированной случайной величины Х превьппают значение выходного сигнала х контролируемой схемы, при этом N VT Устройство, реализующее предлагаемый-способ, работает следующим обраом (фиг. 2). С генераторов 1 и 2 сигналы поступают на смеситель 3, с выхода которого разностной частоты поступает на формирователь 4. Сформированный по амплитуде и длительности (частоте, фазе) сигнал через согласующие устройства 5 И 6 поступает на интегральные схемы 7 и 8. С контролируемой схемы 7 выходной сигнал поступает на первый вход компаратфа 9, на второй вход которого с выхода умножителя 10 поступает случайный сигнал с выхода генератора 11 случайных сигналов, промодулированный выходным сигналом эталонной схемы 8. Импульсы с формирователя 12, запускаемые с выхода генератора 2, поступают на стробирующий вход компаратора 9 и счетный вход счетчика 13. По команде с блока управления 14 в счетчик 13. заносится предустановка в виде числа Y статистических испытаний. Это же число У заносится в операционные регистры вычислителя 15. В вычислитель 15 заносятся также числа и Р.; ц для первого интервала ( i 1) и значениеХ аксГенератор случайных сигналов 11 генерирует равномерно распределенньй в интервале от О до определенного % .„ значения случайный сигнал . В исходном состоянии счетчик 16 обнулен,в счетчике 13 записано число ц . По команде с блока управления 14 запускается генератор 998 случайных сигналов 11. Импульсы с формирователя 12 поступают на стробирующий вход компаратора 9, и одновременно списывают содержимое счетчика 13. Еели в момент прихода импульса на стробируюншй вход компаратора 9, случайный сигнал с выхода умножителя 10 больше выходного сигнала контролируемой схемы, на выходе компаратора 9 появляется импульс, увеличивающий содержимое счетчика 16. При прохождении и импульсов с формирователя 12 счетчик 13 обнуляет ся, а в счетчике 16 записывается число М случаев, когда в момент прихода импульса на стробирукшщй вход компаратора 9 значение случайного сигнала с выхода умножителя 1О больше значения выходнего сигнала контролируемой схемы 7. При этом на выхоае переполнения счетчика 13 появляется командный импульс, по которому код Ыиз счетчика 16 поступает в вычислитель 15, а сам счетчик 16 обнуляется. В вычислителе 15 происходит вычисление значения величины Р по формуле ( V wvCJKC и сравнение значения величины р с и , если PIM Р Pif г последний выдает команду блоку управления 14 на продолжение контроля в следующем временном интервале. Блок управления 14 заносит в счетчик 13 значение и , а в вычислитель 15 значения Р, и для следующего (второго) временного интервала н цикл ксвггроля повторяется. Если после очередного пикла контроля в i -м временном интервб1ле величина Р окажется равной значению, выходящему за предельт , для данного шггервала, то вычислитель не дает команды в блок 14 для продолжения контроля, а вьщает на регистрацию информацию о том, что контро лируемая схема негодна. Если в течение времени контроля во всех временных интер -валах значение р лежит в пределах допустимых значений, то по окончании последне го временного интервала вычислитель 15 выдает на регистрацию сообщение о том, что контролируемая схема годна. Таким образом, предлагаемый способ в отличие от известного позволяет фиксировать отклонение мгновенных значений выходных параметров интегральных микросхем за допустимые пределы и производить оценку этого отклонения по величине отклонения выходного сигнала контролируемой схемы от эталонного. Причем пре 910 дельные отклонения выходного сигнала могут задаваться как в абсолютных, так и в относительных значениях. Кроме того, предлагаемый способ обладает более ВЫСОКОЙ, чем известный, помехозшшпценностью от воздействия случайной помехи, так как контроль в нем производится по среднестатистической оценке. В результате этого достоверность контроля по предлагаемому способу значительно повышается. I Таким образом, контроль параметров :линейных интегральных микросхем по предлагаемому способу значительно повышает достоверность контроля за счет повышения помехозащищенности и определения оценки абсолютных и относительных отклонений параметров от эталонных по величине отклонения выходного сигнала контролируемых схем от эталонного, Формула изобретения Способ контроля параметров аналоговых интегральных микросхем, по которому на вход контролируемой и эталонной микросхем подают стимулирующее воздействие и сравнивают выходные сигналы контролируемой и эталонной микросхем в заданные интервалы времени, о т л и чаюлдийся тем, что, с целью повышения достоверности контроля, задают равномерно распределенный в интервале от нулевого до заданного значения случайный сигнал, модулируют его выходным сигналом эталонной микросхемы, в каждс интервале времени сравнивают между собой У раз значения выходного сигнала контролируемой интегральной схемы и промодулированного случайного сигнала и регистрируют число сигналов N о превьпцешш мгновенными значениями промодулированного случайного сигнала мгновенных значений выходного сигнала контролируемой интегральной схемы, определяют значение величины г по формулесравнивают значения Р в каждом интервале времени с заданными, соответствующими нижнему и верхнему допустимым значениям отклонения мгновенного значения выходного сигнала контролируемой интегральной схемы от эталонного и счктают контролируемую интегральную схему
980029
годной, ecjffl величина Р находится заданных пределах.
Источники информации,
принятые во внимание при экспертизе s (прототип).
Ла/fe tfc/ rflffify/o yff/xffjteffefe
Х/Г7ЙХ
Хэ(л) лтах х5(0-)ха)Т hj{tff))({tK) xajM i)
