Изобретение относится к вибрационной сейсмической технике и может быть использовано в дебалансных вибраторах при вибрационных исследованиях Земли.
Целью изобретения является повышение КПД за счет снижения потерь, обусловленных изменением потенциальной энергии дебалансов.
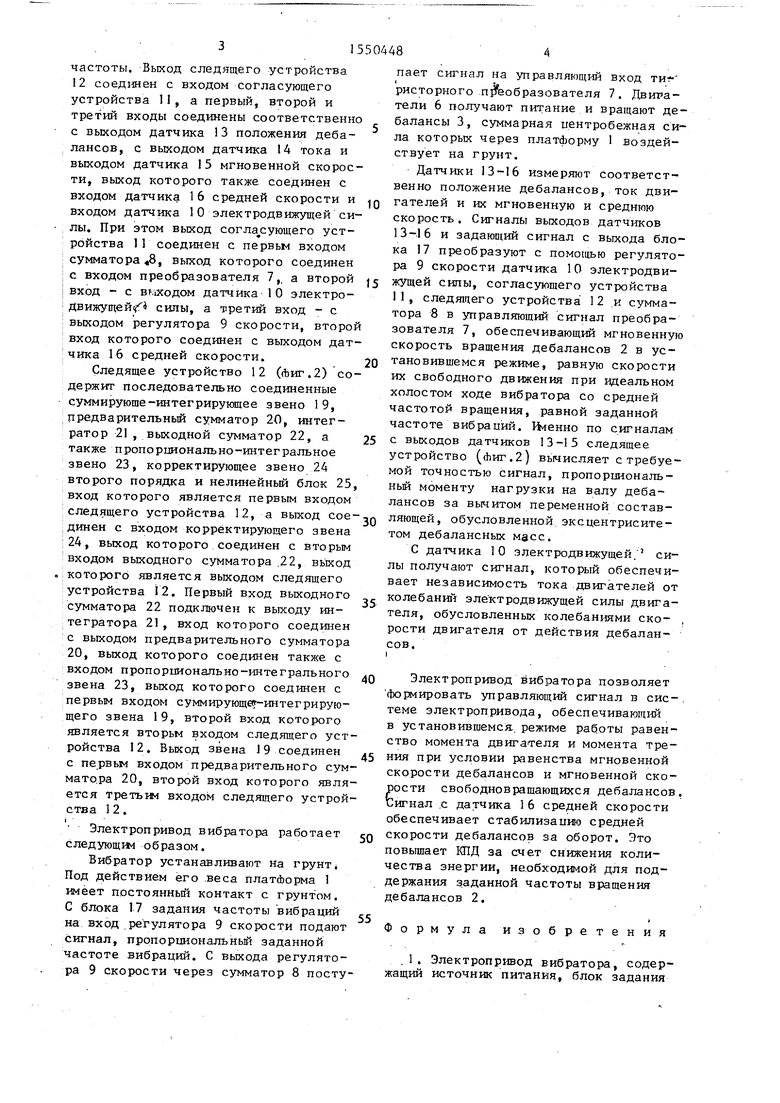
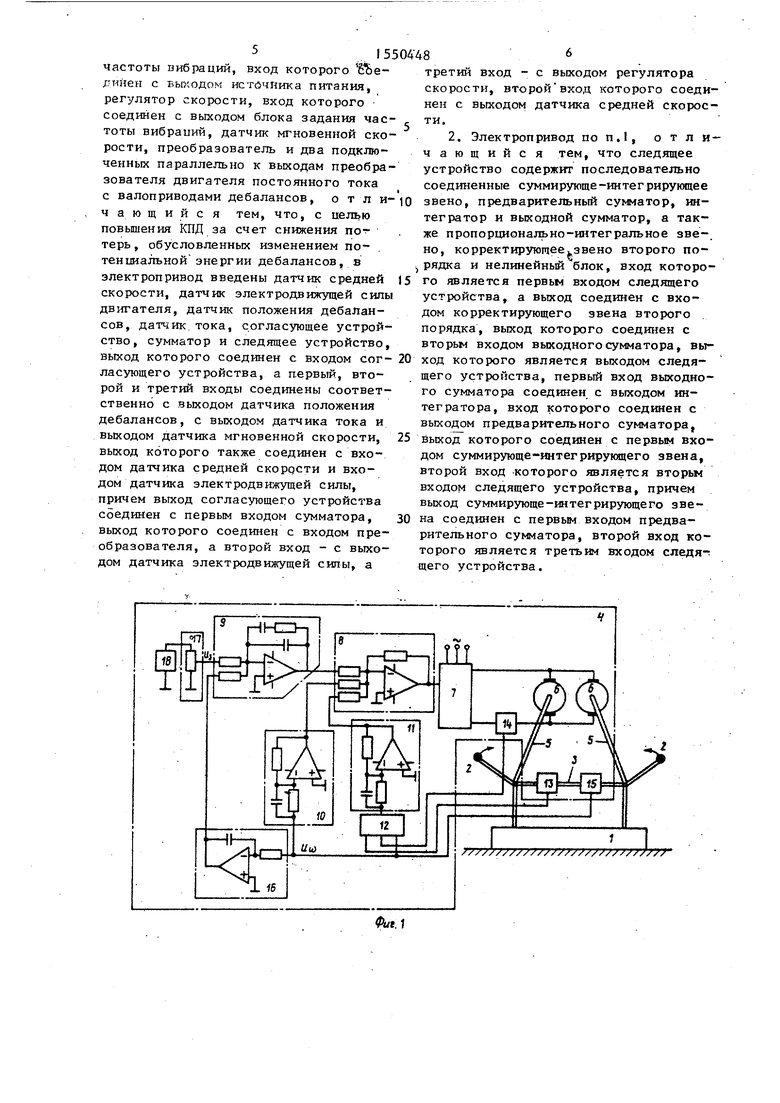
На фиг.1 приведена функциональная блок-схема вибратора; на Фиг.2 - блок-схема следящего устройства.
Вибратор содержит установленную на грунт платформу 1 с расположенными на ней двумя дебалансами 2, блокировочный вал 3, электропривод 4 вибратора, валопроводы 5. Электропривод 4 вибратора содержит два двигателя 6 постоянного тока, подключенные параллельно к выходам реверсивного преобразователя 7, сумматор 8, регулятор 9 скорости, датчик 10 электродвижущей силы, согласующее устройство 11, следящее устройство 12, размещенный на блокировочном валу 3 датчик 13 положения дебалансов 2, установленный в линии соединения двигателей 6 постоянного тока с выходами преобразователя 7 датчик 14 постоянного тока, размещенный на блокировочном валу 3 датчик 15 мгновенной скорости, датчик 16 средней скорости, блок 17 задания частоты, источник 18 питания.
Вход блока 17 задания частоты виб- раиий соединен с выходом источника 18 питания, вход регулятора 9 скорости соединен с выходом блока 17 задания
ел
01
о
Јъ Дь
00
астоты. Выход следящего устройства 12 соединен с входом согласующего стройства 11, а первый, второй и третий входы соединены соответственно с выходом датчика 13 положения дебалансов, с выходом датчика 14 тока и выходом датчика 15 мгновенной скорости, выход которого также соединен с входом датчика 16 средней скорости и входом датчика 10 электродвижущей силы. При этом выход согласующего устройства 1 1 соединен с первьм входом сумматора «8, выход которого соединен с входом преобразователя 7, а второй вход - с вводом датчика 10 электродвижущей силы, а третий вход - с выходом регулятора 9 скорости, второй вход которого соединен с выходом датчика 16 средней скорости.
Следящее устройство 12 (Лиг.2) содержит последовательно соединенные суммируюше-интегрирующее звено 19, предварительный сумматор 20, интегратор 21, выходной сумматор 22, а также пропорционально-интегральное звено 23, корректирующее звено 24 второго порядка и нелинейный блок 25, вход которого является первым входом следящего устройства 12, а выход соединен с входом корректирующего звена 24, выход которого соединен с вторым входом выходного сумматора 22, выход которого является выходом следящего устройства 12. Первый вход выходного сумматора 22 подключен к выходу интегратора 21, вход которого соединен с выходом предварительного сумматора 20, выход которого соединен также с входом пропорционально-интегрального звена 23, выход которого соединен с первым входом суммирующег-интегрирую- щего звена 19, второй вход которого является вторьм входом следящего устройства 12. Выход звена 19 соединен с первьм входом предварительного сумматора 20, второй вход которого является третьим входом следящего устройства 1 2.
Электропривод вибратора работает следующим образом.
Вибратор устанавливают на грунт. Под действием его веса платформа 1 имеет постоянный контакт с грунтом. С блока 17 задания частоты вибраций на вход регулятора 9 скорости подают сигнал, пропорциональный заданной частоте вибраций. С выхода регулятора 9 скорости через сумматор 8 посту0
5
0
5
0
5
0
5
0
5
пает сигнал на управляющий вход ристорного преобразователя 7. Двигатели 6 получают питание и вращают де- балансы 3, суммарная центробежная сила которых через платформу 1 воздействует на грунт.
Датчики 13-16 измеряют соответственно положение дебалансов, ток двигателей и их мгновенную и среднюю скорость. Сигналы выходов датчиков 13-16 и задающий сигнал с выхода блока 17 преобразуют с помощью регулятора 9 скорости датчика 10 электродвижущей силы, согласующего устройства 11, следящего устройства 12 и сумматора 8 в управляющий сигнал преобразователя 7, обеспечивающий мгновенную скорость вращения дебалансов 2 в установившемся режиме, равную скорости их свободного движения при идеальном холостом ходе вибратора со средней частотой вращения, равной заданной частоте вибраций. Шенно по сигналам с выходов датчиков 13-15 следящее устройство (фиг.2) вычисляет с требуемой точностью сигнал, пропорциональный моменту нагрузки на валу дебалансов за вычитом переменной составляющей, обусловленной эксцентриситетом дебалансных масс.
С датчика 10 электродвижущей силы получают сигнал, который обеспечивает независимость тока двигателей от колебаний электродвижущей силы двигателя, обусловленных колебаниями ско- , рости двигателя от действия дебалансов. i
Электропривод вибратора позволяет формировать управляющий сигнал в системе электропривода, обеспечивающий в установившемся режиме работы равенство момента двигателя и момента трения при условии равенства мгновенной скорости дебалансов и мгновенной скорости свободноврешающихся дебалансов. Сигнал с датчика 16 средней скорости обеспечивает стабилизацию средней скорости дебалансов за оборот. Это повышает КПД за счет снижения количества энергии, необходимой для поддержания заданной частоты вращения дебалансов 2.
Формула изобретения
1. Электропривод вибратора, содержащий источник питания, блок задания
515504
частоты вибраций, вход которого сЪе- гтаен с выходом источника питания, регулятор скорости, вход которого соединен с выходом блока задания частоты вибраций, датчик мгновенной скорости, преобразователь и два подключенных параллельно к выходам преобразователя двигателя постоянного тока с валоприводами дебалансов, о т л и- ю
чающийся тем, что, с целью повышения КПД за счет снижения потерь , обусловленных изменением потенциальной энергии дебалансов, в электропривод введены датчик средней скорости, датчик электродвижущей силы двигателя, датчик положения дебалансов, датчик тока, согласующее устройство, сумматор и следящее устройство, выход которого соединен с входом сог- ласующего устройства, а первый, второй и третий входы соединены соответственно с выходом датчика положения дебалансов, с выходом датчика тока и выходом датчика мгновенной скорости, выход которого также соединен с входом датчика средней скордсти и входом датчика электродвижущей силы, причем выход согласующего устройства соединен с первым входом сумматора, выход которого соединен с входом преобразователя, а второй вход - с выходом датчика электродвижущей силы, а
третий вход - с выходом регулятора скорости, второй вход которого соединен с выходом датчика средней скорости.
2. Электропривод по п.1, о т л и - чающийся тем, что следящее устройство содержит последовательно соединенные суммирующе-интегрирующее
звено, предварительный сумматор, интегратор и выходной сумматор, а также пропорционально-интегральное звено, корректирующее.звено второго порядка и нелинейный блок, вход которого является первым входом следящего устройства, а выход соединен с входом корректирующего звена второго порядка, выход которого соединен с вторым входом выходного сумматора, выход которого является выходом следящего устройства, первый вход выходного сумматора соединен с выходом интегратора, вход которого соединен с выходом предварительного сумматора, выход которого соединен с первым входом суммирующе-интегрирующего звена, второй вход которого является вторым входом следящего устройства, причем выход суммирующе-интегрирующего звена соединен с первым входом предварительного сумматора, второй вход которого является третьим входом следящего устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления электроприводом постоянного тока дебалансного виброисточника и устройство для его осуществления | 1983 |
|
SU1144065A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2422979C1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 2012 |
|
RU2499351C1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ИСПОЛНИТЕЛЬНЫМ ДВИГАТЕЛЕМ | 2014 |
|
RU2580823C2 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ИСПОЛНИТЕЛЬНЫМ ДВИГАТЕЛЕМ | 2015 |
|
RU2621716C2 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНО-ИНДУКТОРНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2182743C1 |
| Следящий электропривод с синхронным исполнительным двигателем | 2018 |
|
RU2695804C1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ЧАСТОТНО-РЕГУЛИРУЕМЫМ ЭЛЕКТРОПРИВОДОМ С КОРОТКОЗАМКНУТЫМ РОТОРОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2458447C1 |
| Способ формирования силового воздействия для возбуждения низкочастотных сейсмических сигналов и автоматизированный электропривод дебалансного вибромодуля | 1986 |
|
SU1462216A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 1992 |
|
RU2046537C1 |
Изобретение относится к вибрационной сейсмической технике и может быть использовано в дебалансных вибраторах при вибрационных исследованиях Земли. Цель изобретения - повышение КПД за счет снижения установочной мощности. Электропривод содержит два двигателя постоянного тока, соединенные валопроводами с дебалансами и параллельно подключенные к выходу реверсивного тиристорного преобразователя, регулятор скорости, датчики положения, тока, электродвижущей силы, мгновенной и средней скоростей дебалансов, следящее и согласующее устройства. 1 з.п. ф-лы, 2 ил.
LJ LJ
ЈM «M
N
J
| Сейсмический вибратор | 1978 |
|
SU744404A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Житилин В.В | |||
| и др | |||
| Системы управления электромеханического вибросейсмического источника | |||
| Сб | |||
| науч.трудов, Электромагнитные силовые импульсные системы, СО АН СССР, Новосибирск, 1982, с | |||
| Способ обделки поверхностей приборов отопления с целью увеличения теплоотдачи | 1919 |
|
SU135A1 |
