1
Изобретение относится к автоматиэа,1ШИ управления и конгропя сложных техшгчсескюс объектов, например самолетов, и может йлтъ использовано для повышения безопасности их хкционирования.
В процессе управления сложными техническими объектами возможно возникновение критических ситуаций (КС), в которых , точное вьшолнение необходимой программы действий, выводящей объект уйравления из критической ситуации. Поэтому дпя обеспечения безопасности необходимо оказывать помощь оператору в виде советов, {)екомецдаЩ1й, а при резком дефиците времени необходимо автоматически вьтести объект из КС.
Известно устройство для оповещения экипажа самолета, содержащее блоки логической обработки сигналов, пороговые датчики и индикатор..
Достоинством известного устройства является обеспечение помощи летчику
в щиррком диапазоне разновидностей КС (в условиясх неопределе1шости), поскольку в этом случае экипажу предоставляются рекомендации общего характера, действие производит летчик с учетом собстве1шого более глубокого анализа обстановки Г11 .
Недостатксм данного устройства является то, что в некоторых случа$пс лет10чик плохо справляется с ручным управлением в критических ситуациям и допускает ошибки.
Наиболее близким техзетческим решением к изобретению явгшетсяустройство 5 для автоматизированного управления объектом, содержащее блок датчиков параметров, блок пороговых элементов, блок распознавания криггической ситуации, блок логической оценки достоверности
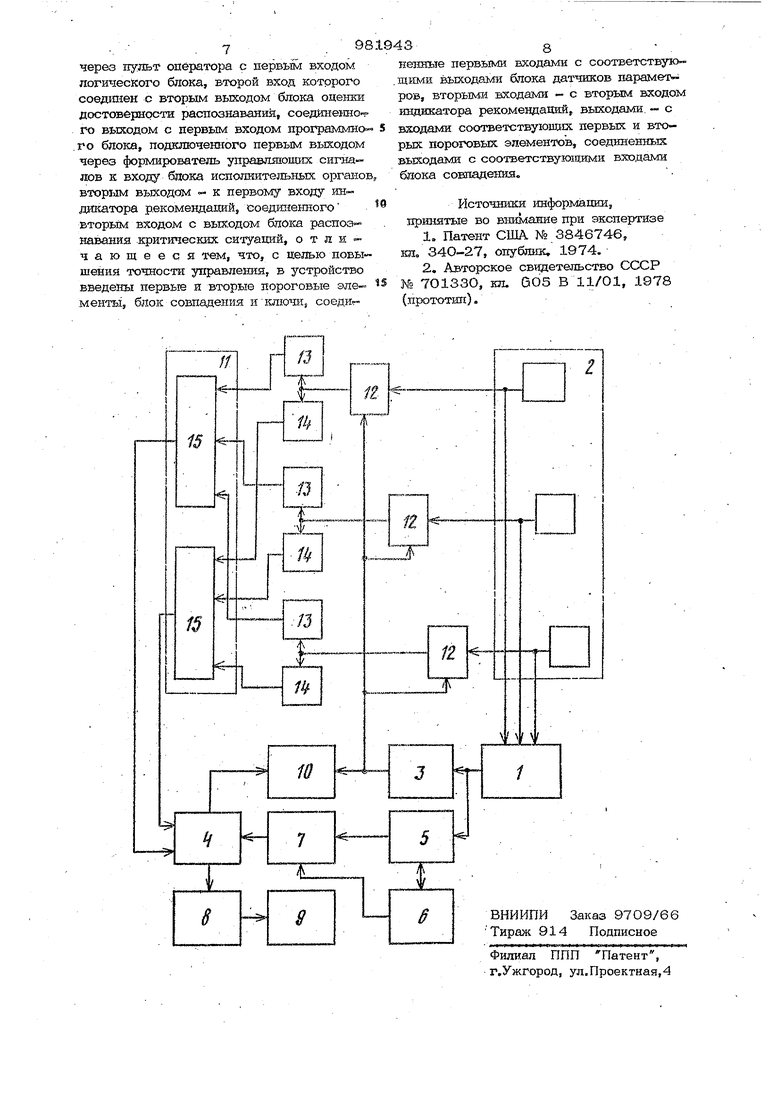
20 распознавания, пульт оператора, логвсческий блок, блок программ, формирователь управляющих сигналов, нспошп те зьных органов и шздшсатор рекомендаций. В устройстве предусмотрено несколько режимов автоматизированного вывода объек та из КС в зависимости от уровня компетентности ойшружения КС, т.е. в зависимости от обнаруженных признаков КС, При большом уровне компетентности осуществляется автоматический вывод из КС, при срермем - вывод из КС в режиме сопровождения экаспажа подсказкой, а при малом уровне компетентности летчик сообщается только об обнаруженных приз наках КС л предлагается обеспечить безопасность самостоятельно . Недостаттсом известного устройства является то, что, при возникновении КС в устройстве используется программа вывода на данной.КС без учета действительного состояния объекта управления, т.е. калодой КС ставится в соответствие определенная (одна) программа вывода из нее, В то же время некоторые КС, например штопор, дредусматривают несколько программ вывода из. КС в зависимости от имеющих место условий полета. При правильнее определении КС, но не точном метода (прогршлмн вывода из КС, сйтушсия лишь усугубгетет : с я и как правило приводит к катастрофе. Цель изобрет шя - повышение точности ухфавлениа путем учета нмбюпшх место условий полета при. вы&)ре программы вьюода объекта йз КС, Поставленная аеяь достигается тем, что в устройство Д1Ш автоматизированного унрйвдшшя с штсфл, содержащее блок датчиков аараметров, соединенный выходами с соответствующими входами блока порсйгошлх элеалвЕтов, выходы кото рого соединевы со входами блока распоз навания критической ситуации и с выхода мн блока ояенки достоверности распознавання, соединенного первым выходом через пульт «ператора с первым входом логического блока, второй вход которого соединен со вторым выходом блока опенки достоверности распознавания, соеди нешюго выходом с первым входом программного блока, подключенного первым выходом через формирователь управляюзвдх сигналов ко входу блока исполнитель iqux органов, вторым выходом - к первому входу индикатора рекомендаций, соединеннохю вторым входом с выходом бно ка распознавання критнческих ситуаций, введены первые и вторые пороговые элементы, бпок совпадения и ключи, соединенные первыми- входами с соответствую щими выходами блока датчиков парамет ров, вторыми входами - со вторым вхоДОМ индикатора рекомендадии, выходами - со входами соответствующих первого и второго пороговых элементов, соединенных выходами с соответствующими входами блока совпадения. На чертеже приведена блок-схема устройства автоматизированного управления объектом. Устройство содержит блок пороговых элементов 1, блок датчиков параметров 2, блок распознавания критических ситуаций 3, блок программ 4, блок логической опенки достоверности распознавания 5, пульт оператора 6, логический блок 7, формирователь управл5ао1цих сигналов 8, блок исполнительных органов 9, индикатор рекомендаций 1О и блок, совпадения 11, ключи 12, первые 13 и вторые 14 пороговые элементы и элементы И 15. Устройство работает следующим образом. При попадании объекта управления в критическую ситуацию, nporpaN-iMa дейст ВИЙ выбирается в зависимости от имеющих место условий. Для определения ймеюшнх место условий при вознккнов.е- НИИ КС контролируемые параметры объекта управления оцениваются по величине с помощью пороговых элементов 13 и 14. Комбинация величин контролируе- мых параметров на вьссоде пороговых элементов оценивается с помощью логических элементов. Выход каждого из логическзях элементов И 15 определяет имеющие место условия, поэтому выходу каждого из логических элементов соответствует своя программа действий, точно соответствующая этим условиям. Тава м образом, точность управления в даннем изобретении увеличивается за счет того, что при возникновении одной и той же КС выбираемая программа действий точно соответствует имеющим место условиям. Блок пороговых элементов 1, предназначенный для обнаружения признаков появления КС, на основе пороговой и логической обработки сигналов блока датчиков параметров 2 осуществляет выявление признаков КС, Появление сигнала на каком-либо выходе блока пороговых элементов 1 означает появление соответствующего признака КС, Сигналы признаков КС поступают в блок распознавания КС 3 и в логический блок оценки достоверности распознавания 5. Блок распознавания КС 3 при наличии всех необходимых признаков выдает сигнал о соответствующей КС на индикатор рекоменда ций 10, а также в блок логической опен- 1Ш достоверности распознавания 5. Креме того, сигнал с вьсюда бщжа распознавания КС 3 поступает в блок одшоси состояния 11 на ключи 12, в результате ключи 12 открываются и пропускают сигналы блока датчиков параметров 2 на вход пороговых элементов 13 и 14. образом, блок оденки состояния 11 начинает работать в случае появления сигнала на выходе блока распознавания КС 3, т.е. если КС обнаружена. Пороговые элементы 13 л 14 настроены на пороги срабатывания соответствукяцие верхней и нижней гранила поля допуска каждого из параметров. В соответствии с величиной сигналов, поступающих на вход поговых элементов 13,на их выходах появляются сигналы. Выхошсые сигналы пороговых элементов 13 поступают на входы логтгческйх элементов И 15, каждый из которых скокалутирован на , одно сочетание значений парвыетров В зависимости о наличных входных сигна лов характерных для данной КС на выходе одного из элементов И 15 появляется сигнал. Этот сигнал соответствует име11 щим место условиям полета, т.е. имею- .щим место величинам сигналов параме ров. Он поступает на сортветствукшщй вход блока программ 4, псщключая тем самым к работе программу действий, пр€(дназначевдую для возникшей КС и . имеющих место условий полета,
Блок.логаческой OBffssn достоверности распознавания 5 щеиивает на сколько близко состояние объекта управления в: предполагаемой КС, оценивая Количество появившихся признаков КС с учетом их важности, например, на основе сравнения взвешенной суммы появившихся признако КС с тремя установленными порогами уровня. Верхний пороговый уровень COOTV ветствует высокому уровню; компетвпт ности системой по распознаванию КС, состояния между верхним и средним уровнями - среднему уровню компетен-л ности, а ниже среднего - низкок уровшо .кофлпетентности.
В соотЬетсгоии с решениями бшжов 3 и 5 на пульт оператора 6 выдается сигнал, предупреждающий пилота о выборе устройством режима вывода объекта из КС.
Предусмотрено три режима выводу объекта из КС: автофлатический режим сопровождения и ручной (устро Лво
сообцает летчику только об обнаружек ных признаках КС),
Окончательный выбор реж11Ма предоставлен оператору, кхпоуяА посредством цульта оператора 6, взыоает твравляюошй сигнал о выборе управпения, который поступает в логяческкй блок 7, кофорый представляет собой логическое устройство, согласующее решешю системы с решением пилота.
После согласования с пнгютом сигнал с блока 7 поступает в впсж программ 4, который в зашссимости ст режима выдает по выбранной шш ДВИНОЙ КС программе инфор шшоо в формирователь уяравляющяос сигналов 8 и индикатор 1О - при автоматяческсм режиме , , система автоматически вывсуцпг объект на КС н янформирует оператора о свопе действиях, шш только в индикатор рекомездаций 10 в режиме согласования, когда пилот сам выводит объект из КС, «спользуя выдАва;емую ему ияфор лашоо в виде поцскаэок и соввто яа эцразю ияцщсатора 10. При автоматическом режшле, в случае, если caiepaTOp ве замечает дрвцствв шемой ему ияфофмааии о возникшей КС, то пульт оператора 6 через оорэдепенный промежутсж врвмешя вмдает сягвал в блок программ 4, С формирователя управляюокх сшгчииюв 8 управпяхяше сигналы поступают к исполнительным гавам 9,
Технически преимущества преддагае мого изо % егтешш эаклочаются в том,
что поваьаоается упразалення щш ваыводе объекта за счет учета щм выборе 1Храграалал ущ аяаюйяя имеющих место услснзий попета; расширяется список КС, для которых может быть использовано хф««щв1гаемое устроАство по сравнению с нэвестшАШ, так как свимшется ограяичевке иа те кЬ, дди иа требуется выбцсипь программу управлшгая в эавйсимсюти. от инеюошх место условий попета.
Формула изобретеви
Уст ройстяо В1ая saaxitJMtK pofa Kar управпеэтя с ьектом conefBicamee баак датчиков парсшютре, соедннеявк выхо,дами с соответстгующкМЁ Bjcooaihar бпо.ка пороговых эяемевтов, ЕШСКОДН котороtjrb соединен с укор/выя asK& распознавашщ цшфкческой сятувшт и с выходами бпсиеа oueras достоверввсгт рвкшозвавання, оовАин ш(хч першьо выходом
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2370416C1 |
| АВТОМАТИЗИРОВАННАЯ ВЫСОКОИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2388663C1 |
| ПИЛОТАЖНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС | 2004 |
|
RU2263973C1 |
| СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА В ОПАСНЫХ СИТУАЦИЯХ | 1996 |
|
RU2128854C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| АВТОМАТИЗИРОВАННАЯ ВЫСОКОИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2339547C9 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| СИСТЕМА ЗАЩИТЫ САМОЛЕТА ОТ ОШИБОЧНЫХ ИЛИ УМЫШЛЕННЫХ ДЕЙСТВИЙ, ПРИВОДЯЩИХ К КАТАСТРОФЕ | 2001 |
|
RU2228885C2 |
| СИСТЕМА ИМИТАЦИИ ВИЗУАЛЬНОЙ ОРИЕНТИРОВКИ ЛЕТЧИКА | 1997 |
|
RU2128860C1 |
| Устройство для распознавания аварийных ситуаций | 1976 |
|
SU643919A1 |
