Изобретение относится к измерительной технике и может быть использовано при индикации положения элементов гидротехнических сооружений, частей химических и атомных реакторов механизмов и устройств подводного строительства и промысла, которые периодически устанавливаются из некоторого центрального положения в периферийные и обратно.
Известно устройство для измерения перемещений, содержащее неподвижные датчики сопло-сопло и расположенный между ними подвижный нормально осям датчиков экран с передней торцовой г занью для взаимодействия со струями датчиков, а задней частью жестко закрепленный на объекте, перемещение которого контролируется. Центральный датчик и два датчика расположены на оси устройства на расстоянии 6. друг от друга, равном величине перемещения в одну сторону от центрального датчика в направлении оси устройства . Оси этих трех датчиков проходят через контролируемые положения, расположенные на оси устройства, 4п датчика для измерения перемещений в 4п контролируемых положениях плоскости расположены группами по четыре по обе стороны от оси устройства и сиивлетркчно перпендикуляру к оси устройства, проходящему через ось центрального датчика. Передняя торцовая грань экрана расположена перпендикулярно оси устройства, проходящей через центральный датчик, и пару датчиков на окружности. Устройство содержит 4п Датчиков,, рав10ноотстоящих друг от друга п .рядёши симметрично относительно оси устройства, расстояния между датчиками в каящом ряду равны между собой и расстояниям расположенных на окружности
ts и соответствукадих этому ряду датчиков от оси устройства, а экран выполнен в виде сикметричной ступенчато расширяющейся от торцовой грани пластины с п ступенями, У которой
20 торцовая грань выполнена перпендикулярной оси устройства, а боковые грани - паргшлёльрыми этой оси, ширина ступени выполнена равной расстоянию между датчиками ряда, срответ25ствукнцего данной ступени, а длина ступени - расстоянию вдоль оси устройства между датчиками на окружноЪти, сортветствукнцими данным ступени и ряду датчиков. Устройство можбт
30 быть снабжено двумя датчиками на диаметре, нормальном оси устройства, и соответствующими этим двум датчикам дополнительным рядом и дополнительной ступенью экрана 1. Во время работы устройства в одни (напорн ле) сопла датчиков подается под давление)у1 жидкость, например вода. Сформированная напорным соплом струя передает свою энергию в другие (приемные) соосные напорным сопла датчиков, создавая Е; них давление, являющееся выходным сигналом. Извест ное устройство предназначено для измерения перемещения в 4п +3+2 контролируемых положениях плоскости, в нем используются 4п датчиков распор ложенных рядами пеготендикулярно оси устройства, и 4п+3+2 датчиков, оси которых проходят через контролируемые положения плоскости. . Недостатком известного устройства является большой расход рабочей ереды на питание датчиков сопло-сопло, пропорциональный числу контролируемых положений плоскости, поэтом устройство неэкономично. Цель изобретения - снижение расхода рабочей среды. Эта цель достигается тем, что в устройстве для измерения перемещений предназначенном для контр| ля 4п+3 рабочих положений на плос|сости, три из которых лежат на оси устройства одно в центре и два равноудалены от центрального на расстояние €, а остальные 4п контролируемых положений расположены п группами по четыре на расстоянии В от оси устройства, где i - номер группы, и симметрично относительно оси устройства и перпендикуляру к оси устройства, проходящему через центральное контролируе мое положение, содержащем датчики сопло-сопло, располагае уше. в контролируемых положениях в .4п датчи ков, расположенных п рядами по четыре симметрично относительно оси уст ройства, каждый из которых соответствует i-ой группе контролируемых положений, расположенный между датчиками подвижный экран, выполненный в виде симметричной относительно оси устройства, пластины с расположенной перпендикулярно к оси устройства передней торцовой гранью и параллельными оси устройства боковыми гранями, каждая из которых , соотвеоствую щая двум контролируемым положениям i-ой группе, отстоит от оси устройства на расстоянии расстояния между датчиками в каждом ряду равны между собой и расстоянию , три да чика сопло-сопло установлены в контролируемых положениях на оси устройства, в экране выполнено прям угольное окно, расположенное симмет рично относительно оси устройства и образугацее в пластине заднюю торцовую грань, отстоящую от ее передней грани на расстояние t , и экран выполнен с 4п дополнительными торцовыми гранями, попарно задними и передними, соответствующими контролируемым положениям, расстояние от середины дополнительной торцовой грани . до оси устройства равно расстоянию Ei , дополнительные передние торцовые грани относительно передней торцовой грани пластины смещены вперед, а дополнительные задние торцовые грани назад на величину , где т - расстояние между центральным контролируемым положением и контролируемым положением, соответствующим данной .торцовой грани, измеренное вдоль оси устройства. По второму варианту в устройстве для измерения перемещений на оси устройства в контролируемых положениях установлены два датчика, один из которалх - в центральном контролируемом положении, в экране выполнено прямоугольное окно, расположенное симметрично относ,итвльно оси устройства и образующее в пластине заднюю торцовую грань, отстоящую от ее передней грани на расстояние Р, и экран выполнен с 4п дополнительными торцовыми гранями попарно задними и передними и соответствующими контролируемым положениям, расстояние от середины дополнительной торцовой грани до оси устройства равно расстоянию , дополнительные передние и задние торцовые грани относительно передней торцовой грани пластины смещены назад, дополнительные передние торцовые грани - на величину I -щ а дополнительные задние торцовые грани - на величину т, где т - расстояние между центральным контролируемым положением и контролируемым положением, соответствующим данной торцовой грани, измеренное вдоль оси устройства. Основной особенностью предлагаемых устройств является то, что для числа контролируемых положений используется в первом случае три датчика сопло-сопло, расположенных в контролируемых положениях на оси устройства, а во втором случае, два датчика сопло-сопло на. оси устройства, один из них - р центральном контролируемом положении. Вариант устройства с тремя датчиками на оси является предпочтительным в случаях,когда требуется большая достоверность измерения положения,достигаемая за счет дублирования показаний третьим датчиком на оси устройства, когда существенным показателем является металлоемкость экрана, когда из условий компоновки устройства экран должен быть симметричным относительно перпендикуляра к оси устройства. Вариант устройства с двумя датиками на оси по сравнению с рассмотренным имеет меньше на один датчик и, таким образом, более экономичен.
Кроме того, для обоих вариантов устройства указанная цель при измерении перемещения в 4п+3+,2 контролируемых .положениях достигается тем, что экран выполнен с двумя дополнительными торцовыми гранями, соответствующими контролируемым положениям на перпендикуляре к оси устройства, проходящем через центральное контролируемое положение, и соо,тветствующими этим контролируемым положениям двумя боковыми гранями., и устройство снабжено дополнительным рядом четырех датчиков сопло-сопло.
В устройстве снижение расхода рабочей среды достигается вследствие уменьшения числа датчиков, располагаемых в контролируемых положениях. Во всех вариантах предложенного устройства каждое контролируемое положение определяется по совокупности сигналов в паре датчиков сопло-сопло , расположенных в соответствующем ряду, и в трех или двух: датчиках, расположенных на оси устройства. При достижении контролируемого положения на оси устройства передней торцовой гранью устройства в датчиках, расположенных на оси, появляется совокупность сигналов, соответствующих данному контролируемому положению . При достижении любого контролируемого положения из п групп той же передней торцовой гранью соответствующая дополнительная передняя или задняя торцовая грань достигает соответствующего датчика на оси устройст.ва, и совместно с парой сигналов от датчикрв соответ;ствук щего ряда получается совокупность сигналов, достаточная для однозначной характеристики данного контролируемого положения ..
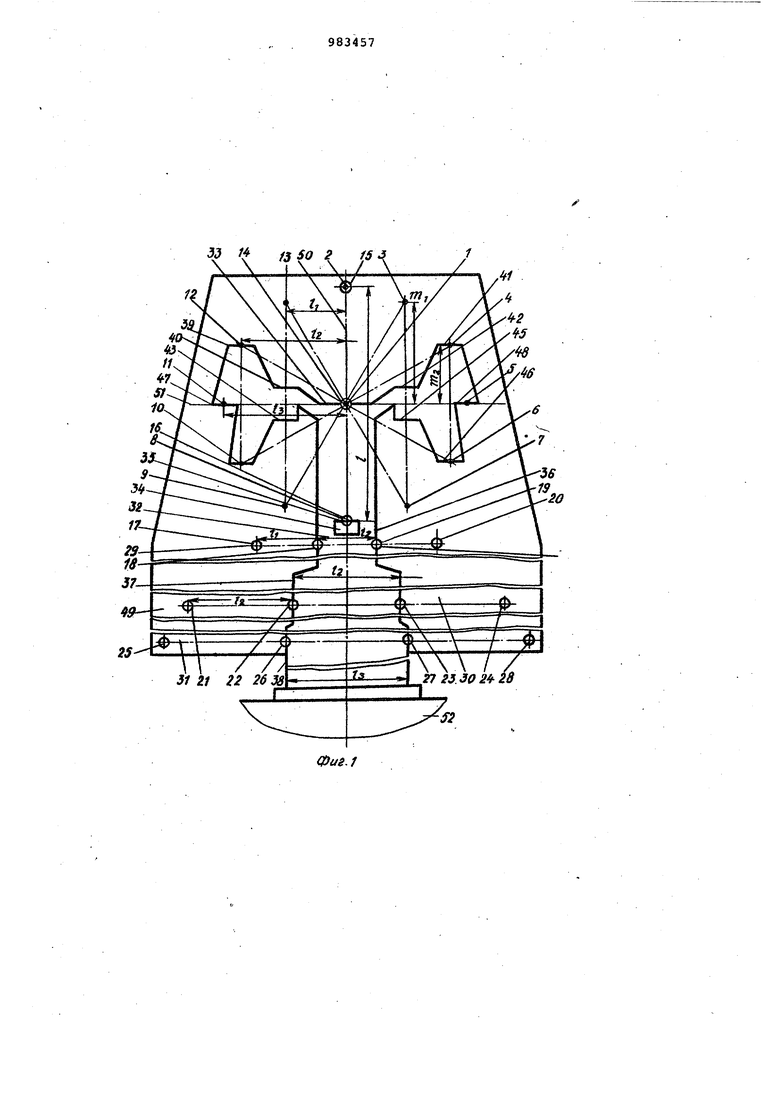
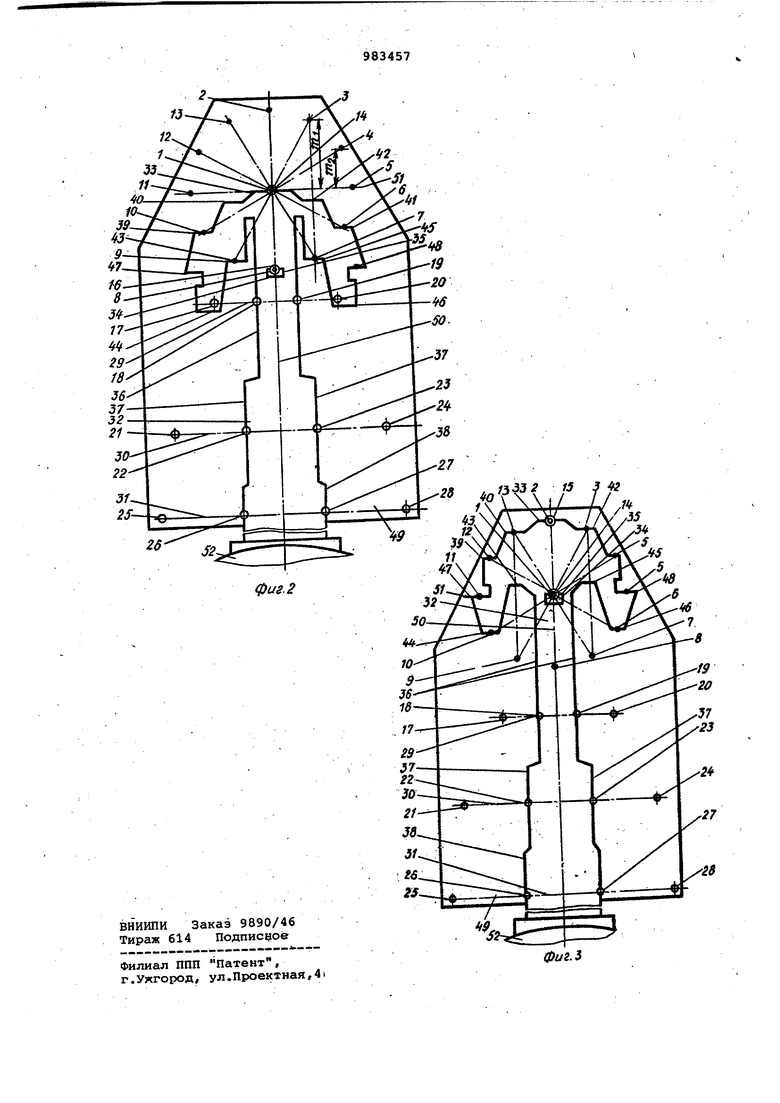
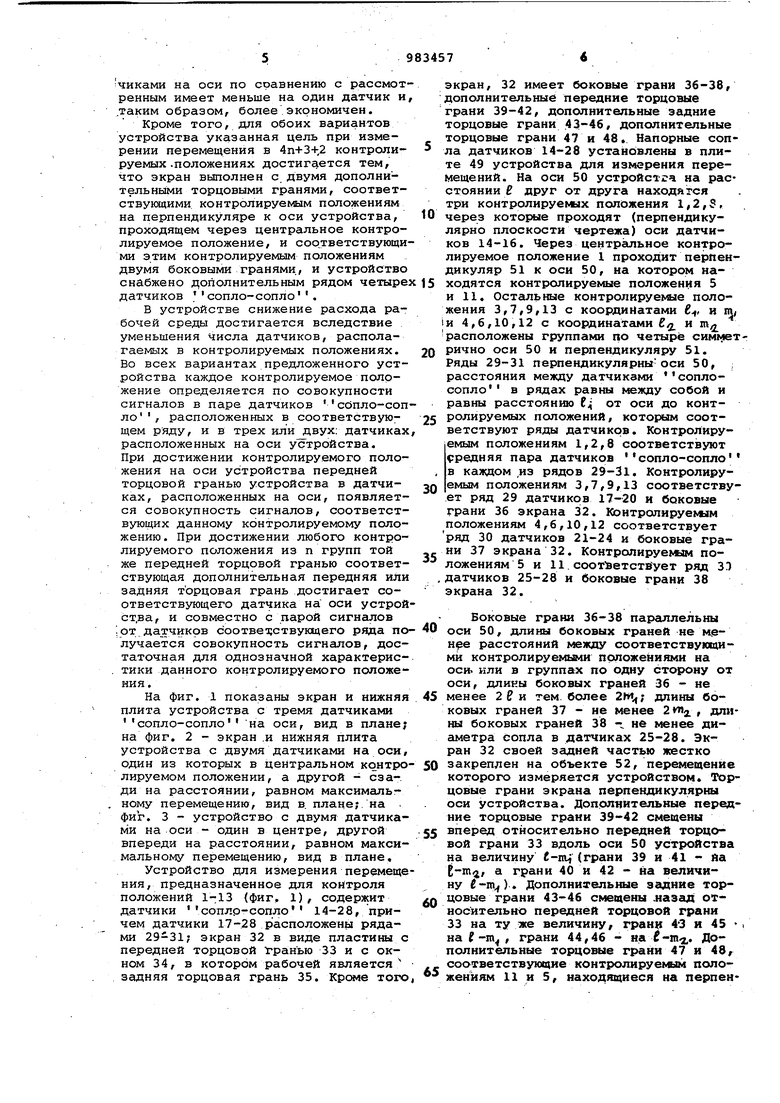
На фиг. 1 показаны экран и нижняя . плита устройства с тремя датчиками сопло-сопло на оси, вид в плане; на фиг. 2 - экран .и нижняя плита устройства с двумя датчиками на оси, один из которых в центральном контролируемом положении, а другой - сза-. ди на расстоянии, равном максимальному перемещению, вид в. плане;, на . фиг. 3 - устройство с двумя датчиками на оси - один в центре, другой впереди на расстоянии, равном максимальному перемещению, вид в плане.
Устройство для измерения перемещения, предназначенное для контроля положений 1-13 (фиг. 1), содержит д.атчики соплр-сопло 14-28, причем датчики 17-28 расположены рядами 29-31; экран 32 в виде пластины с передней торцовой гранью 33 и с окном 34, в котором рабочей является задняя торцовая грань 35. Кроме того,
экран, 32 имеет боковые грани 36-38, дополнительные передние торцовые грани 39-42, дополнительные задние торцовые грани 43-46, дополнительные торцовые грани 47 и 48. Напорные сопла датчиков 14-28 установлены в плите 49 устройства для измерения перемещений. На оси 50 устройстга на расстоянии Е друг от друга находятся три контролируеких положения 1,2,3, через которые проходят (перпендикулярно плоскости чертежа) оси датчиков 14-16. Через центральное контролируемое положение 1 проходит перпендикуляр 51 к оси 50, на котором находятся контролируемые положения 5 и 11. Остальные контролируемое положения 3,7,9,13 с координатами К, и т, 1и 4,6,10,12 с координатами f и ш расположены группами по чеп:1рё симметрично оси 50 и перпендикуляру 51.
Ряды 29-31 перпендикулярны оси 50, ; расстояния между датчиками соплосопло
в рядах равны между собой и
равны расстоянию ( от оси до контролируемых положений, которым соответствуют ряды датчиков. Контролируемым положениям 1,2,8 соответствуют ;редняя пара датчиков сопло-сопло в каждом из рядов 29-31. Контролируемым положениям 3,7,9,13 соответствует ряд 29 датчиков 17-20 и боковые грани 36 экрана 32. Контролируемым положениям 4,6,10,12 соответствует ряд 30 датчиков 21-24 и боковые грани 37 экрана 32. Контролируемым положениям 5 и 11. соотЬетствует ряд ЗЭ датчиков 25-28 и боковые грани 38 экрана 32.
Боковые грани 36-38 параллельны
оси 50, длины боковых граней не м гнре расстояний между соответствуквдими контролируемыми положениями на оси. или в группах по одну сторону от оси, длины боковых граней 36 - не
менее 2 и тем более длины боковых граней 37 - не менее 2 , длины боковых граней 38 - не менее диаметра сопла в датчиках 25-28. Экран 32 своей задней частью жестко
закреплен на объекте 52, перемещение которого измеряется устройством. Торцовые грани экрана перпендикулярны оси устройства. Дополнительные передние торцовые грани 39-42 смещены
вперед относительно передней торцовой грани 33 вдоль оси 50 устройства на величину б-пц (грани 39 и 41 - йа t-m, а грани 40 и 42 - на величину Й-го). Дополнительные задние торцовые грани 43-46 смещены .назад относительно передней торцовой грани 33 на ту же величину, грани 4-3 и 45 , на f-т , грани 44,46 - на f-m,. Дополнительные торцовые грани 47 и 48, соответствующие контролируекем положениям 11 и 5, находящиеся на перпен
дикуляре 51 к оси 50, и имея , могут быть смещены назад на величину , т.е. для работы с датчиком 16, или выполнены фиг. 1) для работы с датчиком 14, находящемся в центральном положении 1. Расстояние между серединг1ми торцовых граней каждой группы контролируемых положений до оси 50 равны между собой и равны расстояниям g от соответствующих котролируемых положений до оси.
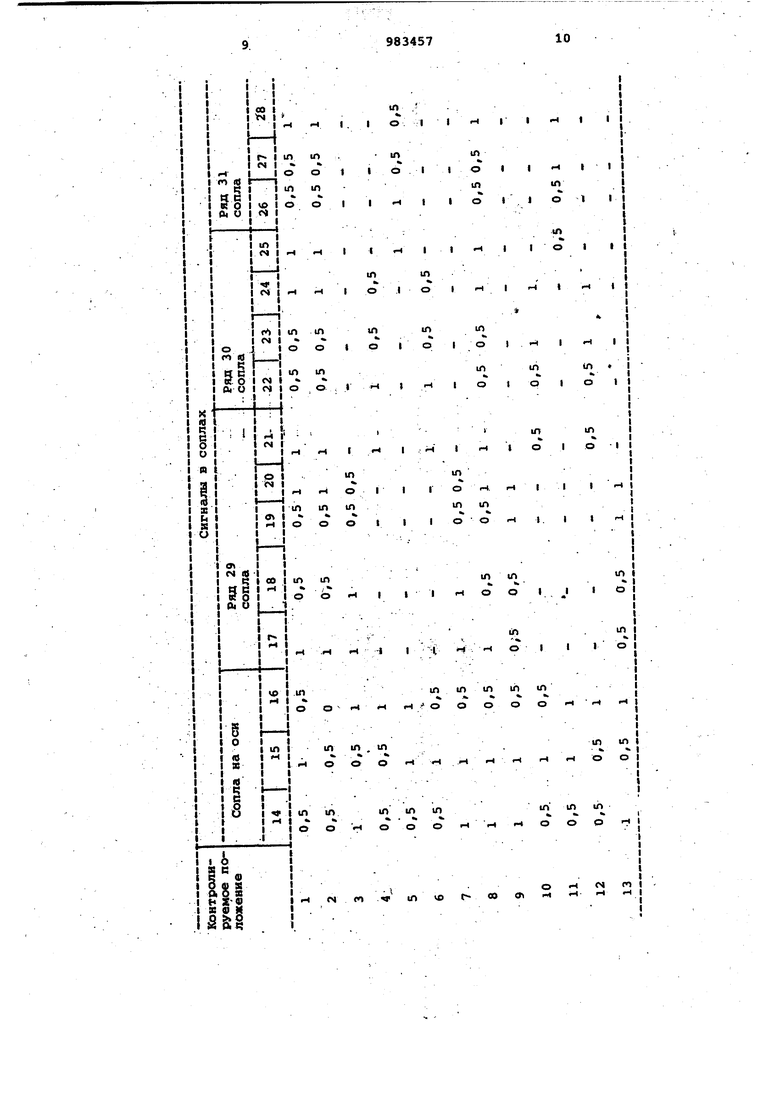
При перемещении контролируемого объекта 52 м экрана 32, рабочие грани последнего взаимодействуют со струями датчиков сопло-сопло. Если рабочая грань экрана не достигает какого-либо датчика и не касается струи, то в приемном сопле этого датчика возникает максимальное значение выходного сигнала, которое обозначим 1,0. При перекрытии проходного сечения сопел наполовину выходной сигнал равен приблизительно 0,5. При полном перекрытии проходного сечения датчика выходной сигнал в приемном сопле датчика равен 0. Например, при центральном контролируемом положении объекта 52 и экрана 32 (фиг. 1) в датчиках 14 и 16 на оси и в средних датчиках 18t 19, 22, 23, 26, 27 выходные сигналы равны по 0,5, в датчике 15 на оси и в остальных датчиках рядов значения выходных сигнёшов рав№1 по 1. При смещении объекта 52, например, в контролируемое положение l3, середина передней торцовой грани 33 достигает этого положения, дополнительная передняя грань 42 наполовину перекрывает проходнре сечение датчика 15, где появляется сигнал
и ,5, а боковые 36 перекрывают сечения датчиков 17 и 18 соответствующего этой группе контролируемых положений ряда 29, и в датчиках 17 и 18 выходные сигналы также равны по 0,5. В датчиках 14 и 16 выходные сигналы по 1. При перемещении объекта 52, например, в контролируемое положение 6 середина передней торцовой грани 33 достигает этого положения, дополнительная передняя грань 39 наполовину перекрывает сопла датчика 14, дополнительна задняя тор цовая грань 44 перекрывает сечение датчика 16, а боковые грани 37 перекрывают сопла датчиков 23 и 24. В датчике 15 выходной сигнал равен 1. При перемещении тела в положение 4 сигналы, равные 0,5, в датчиках 23 и 24, сохраняются, а при совмещении
середины передней торцовой грани 33 с контролируемым положением 4 дополнительная задняя торцовая грань 44 перекрывает сечение датчика 14, дополнительная передняя торцовая грань
5 перекрывает сечение датчика 15, а в датчике 16 выходной сигнал достигает максимального значения, равного 1. Opif перемещении объекта 52 в контролируемое положение на перпендикуляре к оси 50 устройства, проходящем череэ центр, например в положение 11, боковые грани 38 экрана перекрывают сопла датчиков 25 и 26, а дополнительная торцовая 48 перекрывает сопла датчика 14.
Значения си нгшов в датчиках варианта устройства (фиг.. 1), соответствующие коитропируемым положениям 1-13, представлены в таблице. Все контролируемые положения (см. таблиц Л однозначно определяются соответствующей совокупностью сигналов в датчиках на оси и в датчиках .в рядах устройстйа, что обеспечивается благодаря наличию в экране окна с задней торцовой гранью и дополнитель ных передних и задних торцовых граней , Экран 32 варианта устройства с двумя датчиками на оси, один из кото рык в центральном контролируемом положении, а другой сзади на расстоянии, равном максимальному перемещению (фиг. 2) отличается от экрана варианта устройства с тремя датчиками на оси тем, что и задние 43-46 и передние 39-42 дополнительные торцовые грани смещены вдоль оси устройства назад относительно передней тор цовой грани 33. Величина смещения дополнительных передних торцовых граней равна -т|, величина смещения дополнительных задних торцовых граней - т. Дополнительные торцовые грани- 47 и 48, соответствующие контролируемым положениям 11 и 5, могут иметь нулевое смещение относительно грани 33 и тогда воздействовать на струю датчика.14 или (фиг. 2) иметь смещение, равное € и воздействовать на струю датчика 16. Датчик 15 (ось которого проходит через положение 2) в варианте устройства (фиг. 2) не яв ляется необходимым для обеспечения однозначной совокупности сигналов, соответствующих каждому контролируемому положению. Следствием отличий в выполнении экрана и количестве датчиков сопло сопло на оси устройства является отличие в совокупности сигналов, поступающих от датчиков при нахождении объекта 52 в контролируемых положениях. Например, при перемещении объекта в контролируемое положение 13 середина грани 33 достигает этого по ложения, дополнительная задняя торцо вая грань 45 перекрывает наполовину датчик 14, вызывая сигнал, равный 0,5; в датчике 16 сигнал равен 1; в датчиках 17 и 18 ряда 29 выходные си налы равны 0,5, в датчиках 19 и 20 того же ряда сигналы равны по 1. Экран 32 варианта устройства с двумя датчиками на оси, один из которых в центральном контролируемом положении а другой впереди на расстоянии, равном максимальному перемещению (фиг.З также имеет дополнительные передние и задние торцовые грани, смещенные назад относительно передней торцовой грани 33,/Общая длина экрана для это го случая больше примерно на величину 8 по сравнению с длиной экрана дл :варианта устройства (см. фиг. 2). Для одного практического случая, когда число групп контролируемых положений равно п 1 и на оси устройства находятся три контролируемых положения, уменьшение числа датчиков в двух одновременно работающих устройствах делает возможным уменьшение расхода питания на 36,4% в варианте устройства с тремя датчиками на оси и на 45% в варианте устройства с двумя датчиками на оси. Формула изобретения 1. Устройство для измерения перемещений, предназначенное для контроля 4п+3 рабочих положений на плоскости, три из которых лежат на оси устройства - одно в центре и два равноудалены от центрального на расстояние С , а остальные 4п контролируемых положений расположены п группами по четыре на расстоянии i от оси устройства, где 1 - номер группы, и симметрично относительно оси устройства и перпендикуляру к оси устройства, проходящему через центральное контролируемое положение, содержащее датчики сопло-сопло , располагаемые в контролируемых положениях; и 4п датчиков, расположенных п рядами по четыре симметрично относительно оси устройства, каждый из которых соответству-. ет i-ой группе контролируемых положений , расположенный между датчиками подвижный , выполненный в виде симметричной относительно оси устройства пластины с расположенной перпен.дикулярно к оси устройства передней торцовой гранью и параллельными оси устройства боковыми гранями, каждая из которых, соответствующая двум контролируемым положениям в i-ой группе, отстоит от оси устройства на расстоянии расстояния между датчиками в каждом ряду равны между собой и расстоянию , о т л ич аю щ е е с я тем, что, с целью снижения расхода рабочей среды, три датчика сопло-сопло установлены в контролируемых положениях на оси устройства, в экране выполнено прямоугольное окно, расположенное симметрично относительно оси устройства и образующее в пластине заднюю торцовую грань, отстоящую «Л ее передней грани на расстояние Е, и экран выполнен с 4у, дополнительными торцовыми гранями, попарно задними и передними, соответствующими контролируемым положениям расстояние от середины дополнительной торцовой грани, до оси устройства равно расстоянию g , дополнительные передние торцовые грани относительно передней торцовой граHiTпластины .смещены вперед, а дополнительные задние торцовые грани - назад на величину f-m, где т/ - расзтояние между центральным контролируемым положением и контролируемым положе нием,соответствующим данной торцовой грани,измеренное вдоль оси устройства 2. Устройство для измерения перемещений, предназначенное для контроля 4.+3 рабочих положений на плоскости, три из которых лежат на оси устройства - одно в центре и два рав ноудалены от центрального на расстоя ние 8, а остальные 4 контролируемы положений расположены п группами по четыре на расстоянии от оси устрой ства, где i-номер группы, и симметрично относительно оси устройства и перпендикуляру к оси устройства, про ходящему через центрашьное когнтролируемое положение, содержащее датчики сопло-сопло, располагаемые в контролируемых положениях, и 4 датчиков, расположенных п рядами по четыре симметрично отйосчтельно оси устройства, каждый из которых соответствует 1-ой группе контролируемых положений, расположенный между датчи ками подвижный экран, выполненный в виде симметричной относительно оси устройства пластины с расположенной перпендикулярно к оси устройства передней торцовой гранью и параллельными ос(1 устройства боковыми гранями каждая из которых, соответствующая двум контролируемым положениям в i-о группе отстоит от оси устройства на расстоянии , расстояния между датчиками в каждом ряду равны между собой и расстоянию Е, о т л и ч аю щ е е с я тем, что, с целью снижения расхода рабочей среды, на оси устройства в ко нт ролируемых положениях установлены два датчика, один из которых - в центральном контролируемом положении, в экране выполнено {Прямоугольное окно, расположенное симметрично относительно оси устройства и образующее в пластине заднюю торцовую грань, отстоящую от ее перезней грани на.расстояние С и экран выполнен с 4 дополнительными торцовыми гранями попарно задними и перед- ними и соответствуницими контролируемым положениям, расстояние от середины дополнительной торцовой грани до оси устройства равно расстоянию t , дополнительные передние и задние .торцовые грани относительно передней торцовой грани пластины смещены назад, дополнительные передние торцовые грани - на величину, в-т.,, а дополнительные задние торцовые грани на величину , где т., - расстояние между центральным контролируемым положением и контролируемым положением, соответствующим-данной торцовой грани, измеренное вдоль оси устройства. 3. Устройство для измерения перемещений по пп. 1 и 2,отлич ающее с я тем, что экран выполнен с двумя дополнительными торцовыми гранями, соответствующими контролируемым положениям на перпендикуляре к оси устройства, проходящем через центральное контролируемое положение, и соответ- ствующими этим контролируемым положениям двумя боковыми гранями, и устройство снабжено дополнительным рядом четырех датчиков сопло-сопло. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 734503, кл. G 01 В 13/02, 1978 (прототип).
fsio
0uS.J
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения перемещений | 1981 |
|
SU1019240A1 |
| Устройство для измерения перемещений | 1978 |
|
SU734503A1 |
| Устройство для измерения перемещений | 1979 |
|
SU832330A1 |
| Устройство для измерения перемещений | 1979 |
|
SU983456A1 |
| Устройство для измерения перемещений | 1979 |
|
SU905638A2 |
| Устройство для измерения перемещений | 1980 |
|
SU887925A1 |
| Устройство для перемещения грузов | 1982 |
|
SU1074814A2 |
| УСТАНОВКА ДЛЯ ЗАКАЛКИ СТЕКЛА | 1989 |
|
SU1630229A1 |
| ЛАЗЕРНЫЙ ПРОФИЛОМЕТР | 2004 |
|
RU2285234C2 |
| КОМПЛЕКС ДЕФЕКТОСКОПИИ ТЕХНОЛОГИЧЕСКИХ ТРУБОПРОВОДОВ | 2012 |
|
RU2516364C1 |