Изобретение относится к области неразрушающего контроля, в частности к внутритрубной дефектоскопии, и может быть использовано для контроля состояния стенок выведенных из рабочего режима технологических трубопроводов в обвязке компрессорных газоперекачивающих станций.
Известен мобильный робот для внутритрубной диагностики трубопроводов (Егоров И.Н., Кадхим Д.А. «Применение мобильных роботов при внутритрубной диагностике трубопроводов с переменным поперечным сечением». Владимирский государственный университет, г.Владимир, Электронный научный журнал «Нефтегазовое дело», 2011, №3. Стр.73-85 http://www.ogbus.ru/authors/EgorovIN/EgorovIN_l.pdf), состоящий из основания, с колесным приводом в виде двух трехколесных движущих «поясов» и закрепленного на основании сенсорного оборудования системы неразрушающего контроля стенок труб. Недостатком известного устройства является низкая надежность трехколесной ходовой части, так как при попадании одного колеса в открытый отвод изделие перекашивается в трубе и не может самостоятельно продолжать движение.
Известен «Видеокроулер ROWER 600» [http://www.mirndt.ru/rovver/rovver600], состоящий из четырехколесной тележки с электроприводом, на которой укреплен осветитель и телевизионная камера, автоматический моторизованный кабельный барабан с регулируемой подачей с контактными кольцами под кабель различной длины. Кроулер снабжен системой дистанционного управления. Достоинством известного устройства является возможность перемещения внутри трубопровода и обеспечение визуального просмотра внутреннего состояния трубы. Недостатком известного устройства является неспособность обеспечить полноценную оценку состояния металла стенки трубы, а также невозможность проверять отводы от основной трубы, расположенные на удалении от открытого конца трубы.
Известен также «Робототехнический комплекс С-300»,http://xenandt.ru/equipment/?cat=1&group=15&sub=42&prod=16&by=gup], состоящий из герметичного корпуса, четырехколесного полноприводного транспортного модуля, цветной видеокамеры, датчиков движения, датчика угла качания видеокамеры, датчиков крена и тангажа, кабельного барабана, специального кабеля-троса, встроенного необслуживаемого вращающегося контактного устройства, электропривода намотки и механизма регулярной укладки кабеля, датчика метража кабеля, дополнительного пульта управления кабельным барабаном, поста управления, рабочей станции на базе ноутбука со специальным программным обеспечением. Комплекс обладает возможностью измерения размера дефектов и других объектов в трубопроводе. Достоинством известного устройства является возможность визуального контроля состояния внутренней поверхности и оценки размеров видимых дефектов прямого участка трубы в реальном масштабе времени. Недостатком известного устройства является невозможность контроля состояния протяженных вертикальных и боковых отводов от прямолинейного участка трубы.
Известно «Внутритрубное транспортное средство» (патент RU 2418234, ОАО “ОРГЭНЕРГОГАЗ”), предназначенное для передвижения подвижного аппарата диагностического комплекса внутри трубопроводной обвязки компрессорных газоперекачивающих станций. Его задачей является транспортирование диагностической аппаратуры, предназначенной для дистанционного автоматизированного внутритрубного контроля состояния технологических трубопроводов, в том числе их наклонных и вертикальных участков, тройников и отводов. Внутритрубное транспортное средство содержит несущую конструкцию с размещенными на ней в нижней части колесным движителем, а в верхней - механизмом вертикального перемещения опоры, снабженного направляющими и распорным механизмом, системы управления транспортным средством, энергоснабжения и информации. Несущая конструкция выполнена сочлененной, состоящей из передней и задней секций, каждая из которых снабжена одноосным колесным движителем и механизмом вертикального перемещения опоры, секции соединены между собой механизмом сочленения, выполненным в виде симметричного манипулятора, состоящего из четырех последовательно соединенных рычагов, свободные концы крайних рычагов которого снабжены приводами с продольной осью вращения, установленными на обращенных друг к другу сторонах несущей конструкции передней и задней секций, а центральные рычаги соединены между собой и с крайними рычагами приводами с поперечными осями вращения. Достоинством известного устройства является возможность перемещения в трубопроводах различной пространственной ориентации и возможность вхождения в отводы различной ориентации. Недостатками известного устройства являются сложность механической конструкции и отсутствие в составе устройства средств неразрушающего контроля. Наиболее близким к предлагаемому является телеуправляемый диагностический комплекс для обследования трубопроводов изнутри (ТДК) предприятия ЗАО «Диаконт». [ЭМА-контроль для выявления трещиноподобных дефектов. «Информационный листок ЗАО Проектный институт «Газпроект» 2007 г.». Известный комплекс состоит из подвижного внутритрубного аппарата и размещенного на поверхности около входа в трубу пункта управления. Подвижный внутритрубный аппарат состоит из корпуса, электропривода, гусеничного движителя, навесной электромагнитоакустической (ЭМА) сенсорной системы, телевизионной камеры с осветителями. ЭМА преобразователи установлены на рычагах, вращающихся вокруг оси, направленной параллельно продольной оси трубы. При движении аппарата в трубе происходит спиральное сканирование стенки трубы. Сигналы датчиков обрабатываются электронным бортовым устройством подвижного модуля. Обмен электрическими сигналами между подвижным модулем и стационарной аппаратурой, размещенной вне трубопровода, осуществляется по кабелю.
Достоинством известного комплекса является возможность контроля состояния продольной части выведенных из рабочего режима труб обвязки компрессорных станций. Недостатком известного комплекса является низкая надежность вхождения подвижного внутритрубного аппарата в боковые отводы и невозможность их самостоятельного перехода в вертикальные отводы, расположенные на удалении от открытого конца основной трубы.
Цель изобретения - создание простого с точки зрения механики комплекса для внутритрубного контроля состояния технологических трубопроводов произвольной ориентации, открытых с одного конца, а также контроля труб-отводов произвольной пространственной ориентации при удаленном расположении отвода от открытого конца основной трубы.
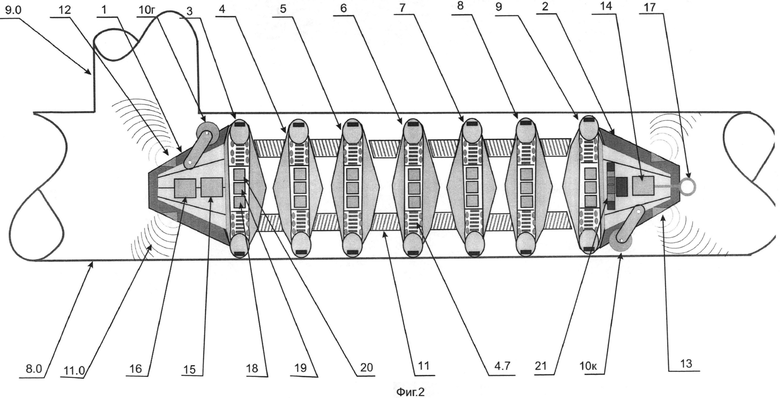
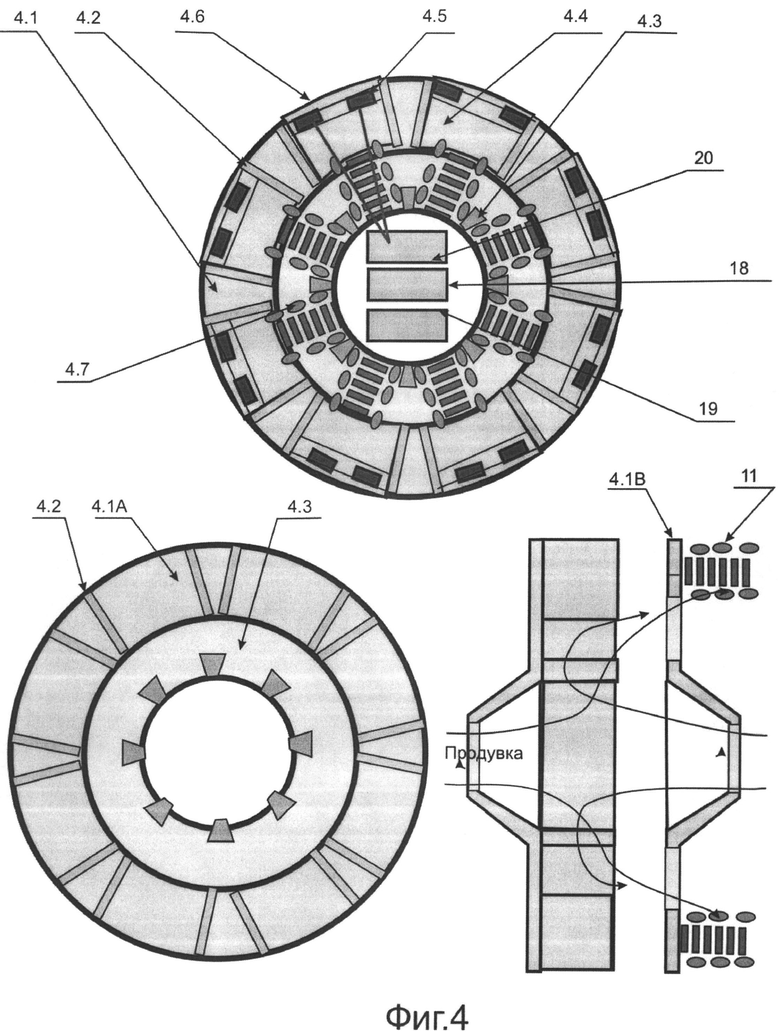
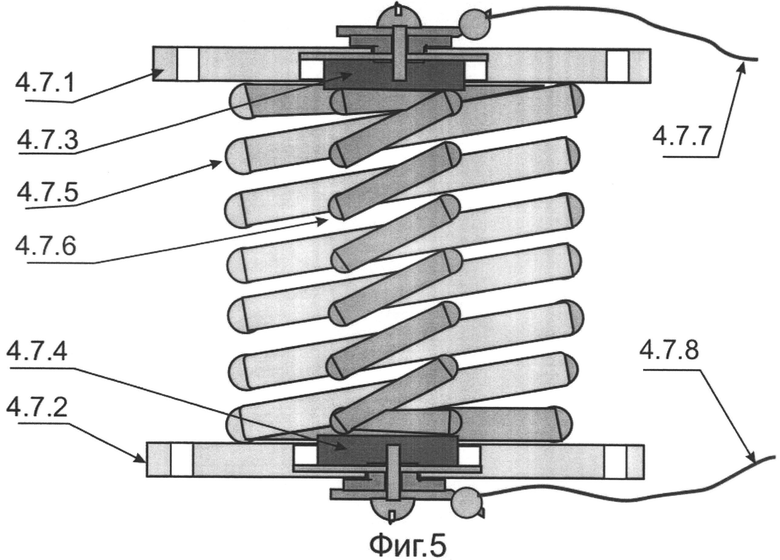
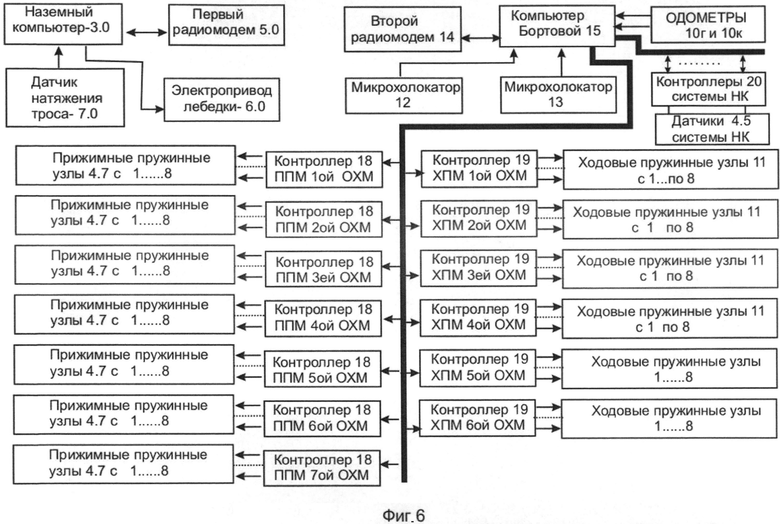
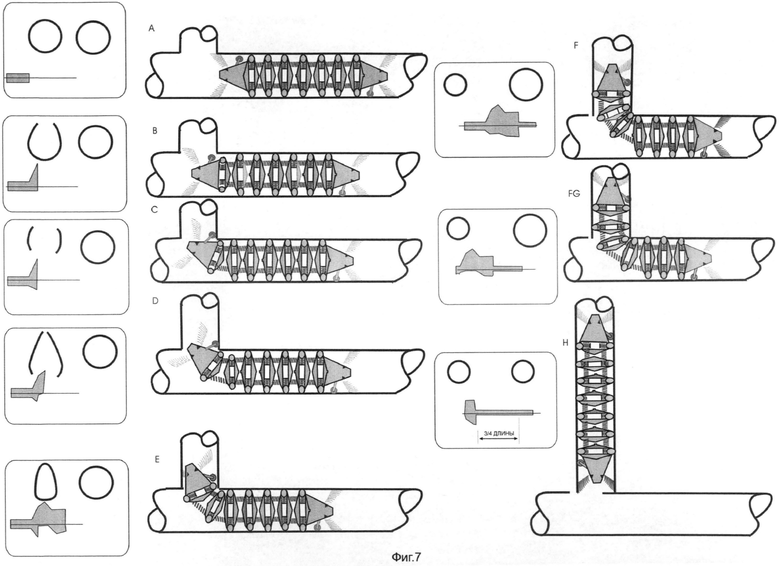
Указанная цель достигается тем, что в комплекс дефектоскопии технологических трубопроводов, состоящий из: подвижного модуля, бортовой электронной аппаратуры, бортового компьютера, датчиков дефектов, одометров, троса, наземной лебедки с барабаном для троса, бортового источника электропитания, наземного компьютера ведены: первый и второй направляющие конусы, несколько опорно-ходовых манжет (ОХМ), несколько групп ходовых пружинных узлов (ХПУ), несколько групп прижимных пружинных узлов (ГШУ), несколько групп ультразвуковых датчиков системы неразрушающего контроля (УДСНК), несколько групп толкателей, несколько ультразвуковых эхолокаторов, несколько контроллеров управления прижимными пружинными узлами, несколько контроллеров управления ходовыми пружинными узлами, первый радиомодем, второй радиомодем, несколько контроллеров управления ультразвуковыми датчиками системы неразрушающего контроля (КУУДС НК), причем подвижный модуль состоит из двух направляющих конусов и группы опорно-ходовых манжет, а направляющий конус и корпус опорно-ходовой манжеты выполнены из эластичного упругого материала, ходовой пружинный узел и прижимной пружинный узел состоят из обычной пружины и термоуправляемой пружины из материала с памятью формы, причем в ходовом пружинном узле термоуправляемая пружина «помнит» сжатое состояние, а в прижимном пружинном узле термоуправляемая пружина «помнит» растянутое состояние; при этом направляющий конус выполнен в виде многолепестковой конструкции, в носовой части которой в каждом лепестке установлены микроэхолокаторы, а в полости первого направляющего конуса установлены бортовой компьютер и источник питания, в центральной полости опорно-ходовой манжеты размещены контроллер управления ходовыми и прижимными пружинными узлами, а также контроллер управления ультразвуковыми датчиками системы неразрушающего контроля, а в радиальных пазах опорно-ходовой манжеты установлены толкатели и прижимные пружинные узлы, а к дисковым поверхностям опорно-ходовых манжет крепятся ходовые пружинные узлы, причем, первый направляющий конус соединяется своими лепестками с соответствующими толкателями опорно-ходовой манжеты, на наружных торцах которой крепятся ультразвуковые датчики системы неразрушающего контроля, поверх которых устанавливаются упругие пластичные накладки, а противоположные торцы толкателей соединены с первыми фланцами соответствующих прижимных пружинных узлов, опирающихся вторыми фланцами в корпус опорно-ходовой манжеты, с задней дисковой крышкой которой соединены первым фланцем соответствующие ходовые пружинные узлы, вторые фланцы которых соединены с передней дисковой крышкой следующей опорно-ходовой манжеты, к задней дисковой крышке которой прикреплены соответствующие ходовые пружинные узлы и так далее до последней опорно-ходовой манжеты, к соответствующим толкателям которой прикреплены лепестки второго направляющего конуса, в торце которого установлен рым-болт, соединенный с выходом антенны второго радиомодема, установленного в полости второго направляющего конуса и электрически соединенного с соответствующими выводами бортового компьютера, соответствующие выводы которого соединены с интерфейсными входами всех контроллеров, управляющих работой ходовых и прижимных пружинных модулей и со входами управления и обмена информацией контроллеров, управляющих работой ультразвуковых датчиков системы неразрушающего контроля, соответствующие выводы которых соединены с соответствующими выводами соответствующих ультразвуковых датчиков системы неразрушающего контроля, а электрические выводы термоуправляемых пружин ходовых и прижимных пружинных узлов соединены с соответствующими выводами контроллеров управления пружинными узлами; первый радиомодем размещен на открытом конце обследуемого трубопровода, и его выводы соединены с соответствующими выводами наземного компьютера, к соответствующим информационным входам которого подключены выводы датчика натяжения троса, намотанного на барабан лебедки, контрольно-управляющие выводы электропривода которой соединены с соответствующими выводами наземного компьютера, при этом трос охватывает ролик датчика натяжения троса, а второй конец троса соединен с рым-болтом подвижного модуля. Создание «Комплекса дефектоскопии технологических трубопроводов» вызвано практической необходимостью обеспечения оперативной диагностики технического состояния стенок труб-отводов технологических газопроводов в обвязке компрессорной станции и необходимостью своевременного формирования плана предупредительного ремонта трубопроводов. Предлагаемое устройство позволяет упростить и удешевить изготовление инспектирующего дефектоскопа и достигнуть высокой достоверности диагностических данных о состоянии стенок труб и сварных швов. Это является показателем промышленной целесообразности изобретения. Изобретение поясняется чертежами. На Фиг.1 показан состав комплекса. На Фиг.2 показана подвижная часть комплекса. На Фиг.3 показан направляющий конус. На Фиг.4 показана опорно-ходовая манжета. На Фиг.5 показано строение ходового и прижимного пружинного узла. На Фиг.6 показана функциональная электрическая схема подвижного модуля. На Фиг. 7 показаны фазы вхождения подвижного модуля в отвод. В Приложении 1 показаны блок-схемы алгоритмов микропрограмм контроллеров, управляющих работой прижимных и ходовых пружинных модулей, позволяющих формировать прямолинейное движение и повороты устройства в отводы, в том числе меньшего диаметра. Комплекс состоит из подвижной внутритрубной части и наружной (наземной) неподвижной части. Как показано на Фиг.1, в состав комплекса входят подвижный модуль 1.0, наземная лебедка 2.0, управляющий наземный компьютер 3.0, трос 4.0, первый радиомодем 5.0, второй радиомодем 14, управляемый электропривод лебедки 6.0, рычаг датчика натяжения троса 7.0. Основная труба отмечена цифрой 8.0, труба-отвод - 9.0, электромагнитный радиоканал - 10.0. Зондирующие сигналы ультразвуковых локаторов отмечены цифрой 11.0. Подвижная часть комплекса, как видно на Фиг.2, состоит из переднего направляющего конуса 1, заднего направляющего конуса 2, первой опорно-ходовой манжеты 3, второй опорно-ходовой манжеты 4, третьей опорно-ходовой манжеты 5, четвертой опорно-ходовой манжеты 6, пятой опорно-ходовой манжеты 7, шестой опорно-ходовой манжеты 8, седьмой опорно-ходовой манжеты 9, переднего одометра 10г, заднего одометра 10к, передней группы микроэхолокаторов 12, задней группы микроэхолокаторов 13, радиомодема 14, бортового компьютера 15, автономного источника электрического тока 16, рым-болта 17. Ходовой пружинный узел обозначен цифрами 11, прижимной пружинный модуль - цифрами 4.7. Контроллеры управления ультразвуковыми сенсорами обозначены цифрами 20. Контроллеры управления прижимными пружинными модулями обозначены цифрами 18, контроллеры управления ходовыми пружинными модулями обозначены цифрами 19. Вентилятор обозначен цифрами 21. Основная труба обозначена цифрами 8.0, труба-отвод - 9.0. Ультразвуковые волны микроэхолокаторов обозначены цифрами 11.0. Возможная конструкция направляющего конуса показана на Фиг.3. Корпус 1.1 направляющего конуса может быть выполнен в виде литой конструкции из полиуретана твердостью 90-95 по Шору А. Корпус многолепестковый, в собранном виде представляет собой усеченную пирамиду с различным числом граней, например с восемью. Как видно из развертки (Фиг. 3,С), между гранями имеются треугольные вырезы, позволяющие свободным концам граней сближаться и расходиться. Близко к вершине пирамиды в гранях с наружной стороны выполнены глухие отверстия 1.2 (Фиг.3,В), предназначенные для установки микроэхолокаторов 12 (или 13). В одну из щелей между гранями выходит колесо одометра 10г (или 10к), ось рычага которого крепится внутри направляющего конуса. В полости пирамиды размещаются бортовой компьютер 15 и автономный источник электрического тока 16. В заднем направляющем конусе 2 (Фиг.2) устанавливается вентилятор 21, радиомодем 14, а к вершине пирамиды этого конуса крепится рым-болт 17. В оконечной части каждой грани (лепестка) с внутренней стороны конуса выполнены пазы 1.3 (Фиг.3,В), в которые вставляются и закрепляются полиуретановые толкатели 4.4 опорно-ходовой манжеты 3 (или 9 для заднего направляющего конуса). Над пазом снаружи грани крепится узел пьезокерамических преобразователей 4.5, который накрывается накладкой 4.6. Узел пьезокерамических преобразователей 4.5 представляет собой группу пьезокерамических преобразователей с поглотителем ультразвука с нерабочей стороны пьезокерамической пластины. Группа преобразователей залита в полиуретан так, чтобы образовалась пластина нужного размера. Накладка 4.6 представляет собой пластину из упругого пластичного материала, например из полиуретана с твердостью 70-75 единиц по Шору А. Опорно-ходовая манжета (ОХМ) (Фиг.4) состоит из корпуса 4.1 с прямоугольными карманами, образованными ребрами 4.2, с сепараторами 4.3 и крышки 4.1В. Во внутренней полости корпуса размещены контроллеры 18 для управления прижимными пружинными узлами 4.7, контроллеры 19 для управления ходовыми пружинными узлами 11 и контроллеры 20 управления пьезокерамическими ультразвуковыми преобразователями 4.5. В прямоугольные пазы вставляются толкатели 4.4 и пружинные прижимные узлы 4.7. Поверх толкателей 4.4 крепятся узлы пьезокерамических преобразователей 4.5, которые накрываются накладкой 4.6 со стороны внешней цилиндрической поверхности опорно-ходовой манжеты. Боковая сторона опорно-ходовой манжеты закрывается полиуретановой крышкой 4.1В, снабженной элементами крепления ходовых пружинных узлов 11. Элементы крепления ходовых пружинных узлов не показаны. На Фиг.5 показана возможная конструкция ходового пружинного узла 11 (ХПМ). Такая же конструкция соответствует прижимному пружинному узлу 4.7 (НИМ). Пружинный узел состоит из первого фланца 4.7.1, второго фланца 4.7.2, первой шайбы 4.7.3, второй шайбы 4.7.4, стальной пружины 4.7.5, термоуправляемой пружины 4.7.6, первого токоподвода 4.7.7, второго токоподвода 4.7.8. Термоуправляемая пружина может быть изготовлена из материала с памятью формы, например из нитинола. Вторая шайба 4.7.4 устанавливается с возможностью ее вращения вокруг продольной оси относительно фланца 4.7.2. Обе шайбы 4.7.3 и 4.7.4 гальванически изолируются от фланцев 4.7.1 и 4.7.2. Термоуправляемая пружина для прижимного пружинного узла 4.7 изготавливается так, чтобы при ее нагревании происходило ее удлинение. Термоуправляемая пружина ходового пружинного узла 11 изготавливается так, чтобы при ее нагревании происходило ее сжатие. Фланцы 4.7.1. и 4.7.2 имеют отверстия для крепления пружинного узла. На Фиг.6 показана структурная схема информационной части системы. На рисунке показаны две части системы: наземная часть системы и структура подвижной части системы. Наземная часть системы состоит из компьютера 3.0 с соответствующим интерфейсом, первого радиомодема 5.0, электропривода лебедки 6.0 и датчика натяжения 7.0 троса лебедки. Подвижная часть системы - это информационно-управляющая часть подвижного диагностического аппарата. Эта часть состоит из бортового компьютера 15, связанного со вторым радиомодемом 14, с первой группой микроэхолокаторов 12, со второй группой микроэхолокаторов 13, с первым 10г и вторым 10к одометрами, с контроллерами 20 ультразвуковых пьезокерамических датчиков системы неразрушающего контроля (НК), с контроллерами 18 управления прижимными пружинными узлами 4.7 (ППУ) и с контроллерами 19 управления ходовыми пружинными узлами 11 (ХПУ). Большое количество датчиков ультразвуковой системы неразрушающего контроля и большое количество пружинных модулей требует адресуемой передачи команд и данных из бортового компьютера в соответствующие контроллеры и обратно. По этой причине двусторонняя связь между контроллерами и бортовым компьютером осуществляется последовательным кодом по мультиплексным шинам (на рисунке показаны жирными линиями). Контроллеры 18 и 19 имеют мощные выходы релейного типа, обеспечивающие требуемые токи в пружинные узлы 4.7 и 11. На Фиг.7 показаны различные стадии процесса вхождения подвижного модуля в отвод. Слева от рисунка трубы показан вид изображения на экране дисплея, формируемого компьютером по сигналам передней 12 (левое изображение на экране) и задней группы 13 (правое изображение) эхолокаторов, в нижней части экрана - изображение, соответствующее изменению вертикального и горизонтального диаметров обследуемой трубы по ее длине, формируемое по результатов измерений микроэхолокаторами и одометрами. Работа комплекса происходит следующим образом.
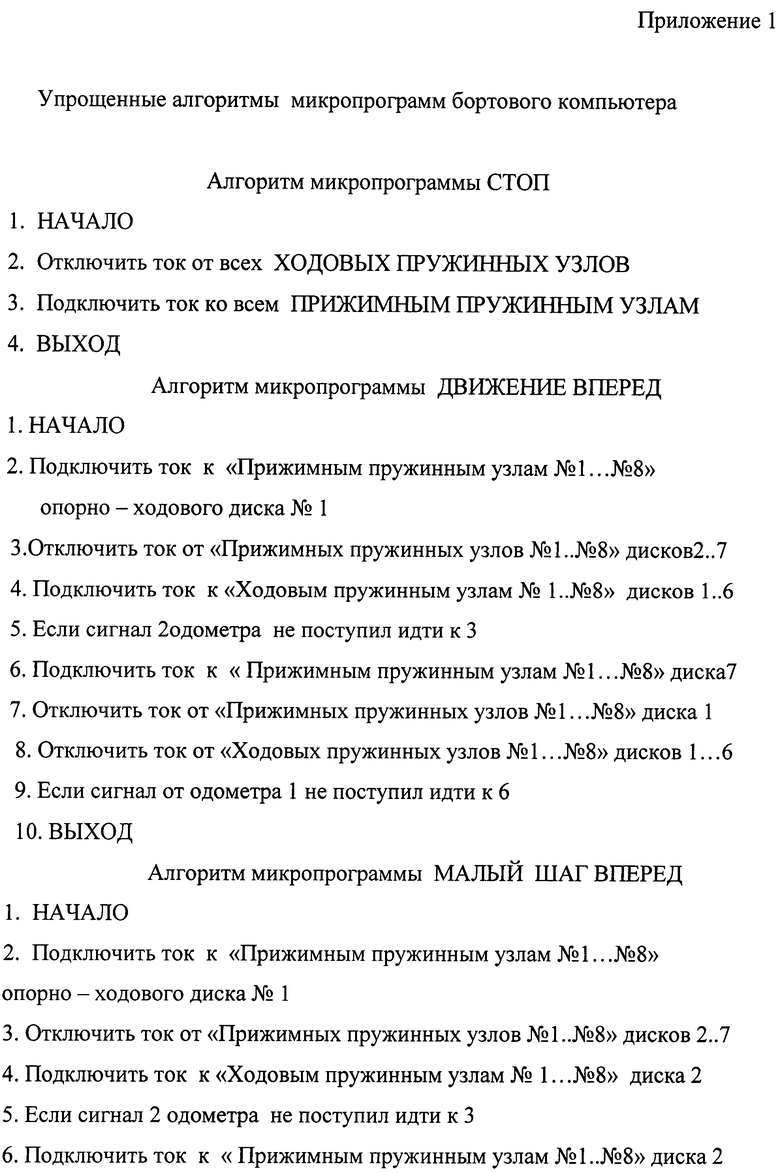
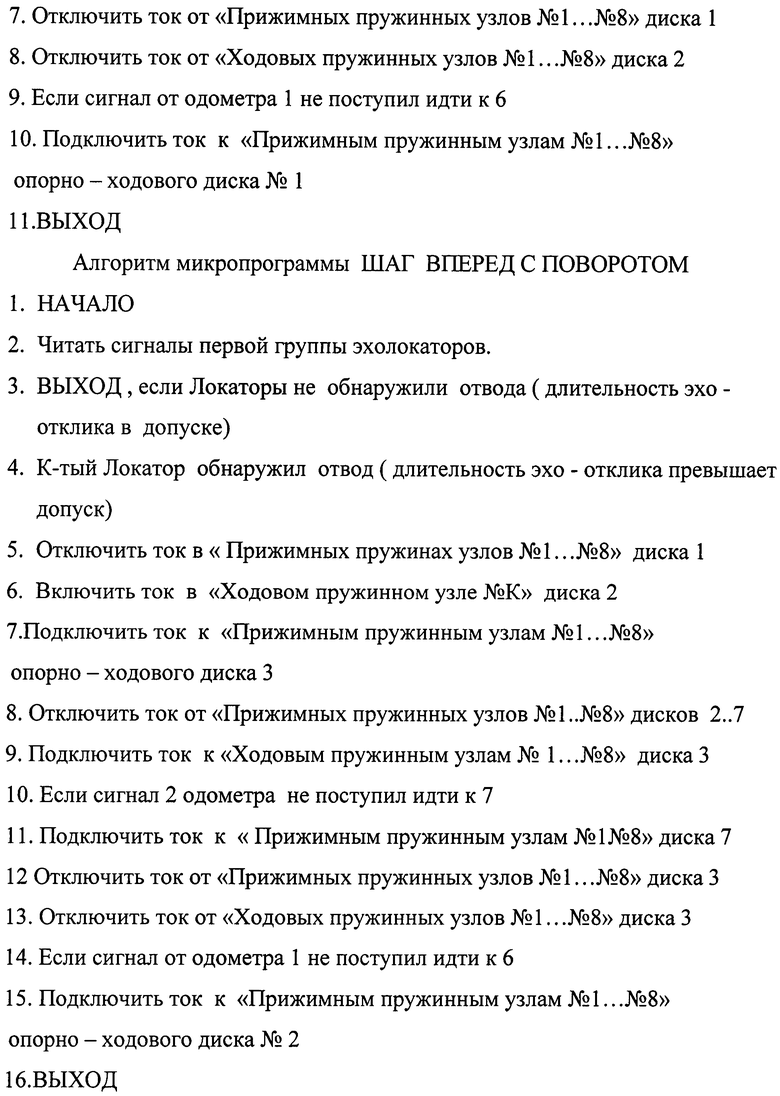
К кольцу рым-болта 17 подвижного модуля 1.0 (Фиг.1) крепится прочный легкий трос 4.0, например из кевлара. Трос 4.0 намотан на барабан лебедки 2.0. Включаются питание наземного оборудования и питание подвижного модуля 1.0. Опорно-ходовые манжеты 3...9 имеют минимальный диаметр, так как все толкатели 4.4 (Фиг.4) притянуты пружинными узлами 4.7. (Фиг.4) к центру соответствующей опорно-ходовой манжеты. Подвижный модуль 1.0 вводится в открытый конец основной трубы 8.0 (Фиг.1) и проталкивается внутрь трубы 8.0. После включения электропитания наземного компьютера 3.0 запускается его программа управления комплексом. Запускается рабочая программа бортового компьютера 15 (Фиг.2) подвижного модуля 1.0. Оператор, обслуживающий комплекс, инициирует в компьютере 3.0 (Фиг.1) программу привода в движение подвижного модуля 1.0. Управляющие сигналы из соответствующих интерфейсных выходов компьютера 3.0 поступают на соответствующие входы первого радиомодема 5.0. Электромагнитная волна 10.0 переносит информационные сигналы с первого радиомодема 5.0 на антенну второго радиомодема 14 подвижного модуля 1.0, а также для обратной связи переносит сигналы бортового компьютера 15 от модема 14 подвижного модуля 1.0 обратно к модему 5.0 и к компьютеру 3.0. В качестве антенны радиомодема 15 подвижного модуля 1.0 используется рым-болт 17. Управляющие сигналы с интерфейсного выхода радиомодема 14 поступают на соответствующие входы бортового компьютера 15 подвижного модуля. Бортовой компьютер 15 расшифровывает команды оператора, поступившие от наземного компьютера 3.0. В начале работы оператор выдает команду включения привода подвижного модуля. По этой команде включаются микроэхолокаторы 12 и 13. и инициализируются контроллеры 18 и 19 управления прижимными 4.7 и ходовыми 11 пружинными модулями, и включается вентилятор 21. Квитанция о включении электропривода и информация от микроэхолокаторов 12 и 13 передаются из компьютера 15 на соответствующие входы радиомодема 14 и через его антенну переносятся электромагнитной волной 10.0 к радиомодему 5.0 (Фиг.1) наземного компьютера 3.0. Компьютер 3.0 отображает на экране дисплея радиусы поперечного сечения трубы, измеренные группой головных и хвостовых микроэхолокаторов 12 и 13 подвижного модуля 1.0. Здесь же отображается картина изменения диаметра трубы вдоль направления перемещения подвижного модуля (Фиг 7а). Оператор, обслуживающий комплекс, может наблюдать на экране дисплея изменение положения подвижной части комплекса внутри трубы 8.0 и радиальные расстояния от микроэхолокаторов 12 и 13 до стенки трубы 8.0. По команде ДВИЖЕНИЕ ВПЕРЕД бортовой компьютер 15 выдает в мультиплексную шину команды для контроллеров 18 и 19 каждой опорно-ходовой манжеты 3, 4, 5, 6, 7, 8, 9 (Фиг.2). На структурной схеме информационной системы (Фиг.6) показаны информационные связи бортового компьютера 15 с контроллерами 18, управляющими прижимными пружинными узлами 4.7, и с контроллерами 19, управляющими ходовыми пружинными узлами 11 каждой из опорно-ходовых манжет. Движение выполняется при чередовании операций придания жесткого сцепления со стенкой трубы передней опорно-ходовой манжете 3, ослаблении сцепления со стенкой трубы остальных опорно-ходовых манжет 4, 5, 6, 7, 8, 9, подтягивания всех манжет 4, 5, 6, 7, 8, 9 к передней манжете 3 за счет сжимания ходовых пружинных узлов 11, расположенных между опорно-ходовыми манжетами. После этого включается жесткое сцепление задней опорно - ходовой манжеты 9 и ослабляется сцепление передней опорно-ходовой манжеты 3 со стенкой трубы 8.0. Затем восстанавливается исходное расстояние между всеми опорно-ходовыми манжетами 3, 4, 5, 6, 7, 8, 9. Это обеспечивается за счет отключения питания с ходовых пружинных узлов 11. В результате распрямления пружин в ходовых пружинных узлах 11 опорно-ходовые манжеты 3, 4, 5, 6, 7, 8 отталкиваются от зажатой в трубе 8.0 опорно-ходовой манжеты 9. После этого передняя опорно-ходовая манжета 3 перемещается со всеми остальными дисками (кроме последнего) вперед и ее положение относительно стенки трубы 8.0 опять фиксируется из-за увеличения силы ее сцепления со стенкой трубы за счет возрастающих сил трения при прижатии частей обода опорно-ходовой манжеты 3 к стенке трубы соответствующими прижимными пружинными узлами 4.7, на которые бортовой компьютер 15 выдает в этот момент через контроллеры 18 соответствующую управляющую команду. Режим интенсивного движения начинается с выдачи токовых импульсов в прижимные пружинные модули 4.7 всех опорно-ходовых манжет. Коммутаторы контроллеров 18 подключают термоуправляемые пружины 4.7.6 прижимных пружинных узлов 4.7 к источнику питания. Токовый импульс, протекающий по пружинам 4.7.6, нагревает их. Материал термоуправляемой пружины меняет свою кристаллическую структуру, пружина становится жестче и восстанавливает форму, которая была ей задана при изготовлении. В данном случае пружина 4.7.6 выполнена так, что при нагревании она начинает растягиваться. Сила нагретой пружины 4.7.6 превышает упругую силу обычной пружины 4.6.5. В итоге фланец 4.7.1 отжимается от фланца 4.7.2 (Фиг.5). Из Фиг.4 видно, что растягивание пружин 4.7.6 приводит к радиальному выталкиванию толкателей 4.4 из карманов диска 4.1 наружу. Толкатели выдвигаются до соприкосновения накладок 4.6 со стенкой трубы и прижимают к ней и накладки 4.6, и узлы ультразвуковых датчиков 4.5. Для выполнения неразрушающего контроля стенки трубы к ее стенке прижимаются ультразвуковые датчики нужного количества опорно-ходовых манжет, например двух - 3 и 4. По истечении заданного времени бортовой компьютер 15 (Фиг.2) инициирует работу ультразвуковых датчиков 4.5. Высокочастотный импульс механических колебаний ультразвукового датчика вызывает распространение упругих колебаний в полиуретановой накладке 4.6. Накладка 4.6 выполнена из материала с хорошей пластичностью (например, из полиуретана с твердостью около 70-75 единиц по Шору А) и под давлением толкателя 4.4 вдавливается в неровности металла стенки трубы, что обеспечивает акустический контакт ультразвукового датчика с контролируемой стенкой трубы. Для контроля может быть применен, например, «Дифракционно-временной метод контроля» [Ермолов И.Н. Дифракционно-временной метод контроля. В мире неразрушающего контроля, 2 июня, 2001. Стр.7-10] (зарубежное TOFD). При использовании волн, распространяющихся по образующей окружности трубы, можно обнаруживать продольные трещины. В этом случае используются ультразвуковые датчики 4.5 одной и той же опорно-ходовой манжеты, например опорно-ходовой манжеты 3. При использовании волн, распространяющихся вдоль трубы, ультразвуковые датчики соседних опорно-ходовых манжет, например 3 и 4, позволяют обнаруживать поперечные трещины тем же TOFD методом. Это дает возможность контролировать состояние кольцевых швов. Режим работы задается программой бортового компьютера 15 и может быть установлен оператором с компьютера 3.0 (Фиг.1) по радиоканалу. Временные интервалы распространения упругих колебаний в стенке трубы измеряются соответствующими контролерами 20 системы неразрушающего контроля. Результаты измерений накапливаются в памяти бортового компьютера 15 и передаются от него через радиомодемы 14 и 5.0 в наземный компьютер 3.0. В наземном компьютере 3.0 формируется описание дефектов, обнаруживаемых в стенке трубы. После получения результатов контроля стенки трубы в конкретном контролируемом месте трубы бортовой компьютер 15 формирует команду на перемещение подвижного модуля. По этой команде отключаются прижимные пружинные узлы 4.6 в опорно-ходовых манжетах 4, 5, 6, 7, 8, 9 и включаются ходовые пружинные узлы 11 в опорно-ходовых манжетах 3, 4, 5, 6, 7, 8. Прекращение нагревания пружин прижимных узлов 4.7.6 приводит к их остыванию и снижению их упругости. В итоге сила пружин 4.7.5 превышает силу упругости пружин 4.7.6 и толкатели 4.4 отжимаются от стенки трубы. В ходовых пружинных узлах 11 термоуправляемые пружины 4.7.6 изготавливают так, что при их нагревании пружины сжимаются. В результате сжатия пружин 4.7.6 в ходовых пружинных узлах 11 слабо прижатые к стенке трубы опорно-ходовые манжеты 4, 5, 6, 7, 8, 9 будут подтянуты к стенке соответствующей опорно-ходовой манжеты и указанные опорно-ходовые манжеты могут приблизиться одна к другой и потянуть за собой задний направляющий конус 2. Контроль продольного перемещения подвижного модуля 1.0 осуществляется бортовым компьютером 15 по сигналам одометра 10к, установленного на заднем направляющем конусе 2. После оценки величины перемещения направляющего конуса 2 на один заданный шаг бортовой компьютер 15 инициализирует торможение опорно-ходовой манжеты 9. Это осуществляется выдачей в соответствующие контроллеры 18 команды СТОП, приводящей к подключению электрического тока к прижимным пружинам 4.7.6 опорно-ходовой манжеты 9. Затем отключается питание от прижимных пружин 4.7.6 опорно-ходовой манжеты 3 и отключается питание всех ходовых пружинных узлов 11. Так как опорно-ходовая манжета 9 оказывается жестко заторможенной относительно стенки трубы, то при охлаждении пружин 4.6.7 в прижимных пружинных узлах манжет 3, 4, 5, 6, 7, 8 сцепление манжет со стенкой трубы ослабевает и толкатели 4.4 этих манжет отжимаются к центру манжет стальными пружинами 4.7.5. В ходовых пружинных узлах 11 упругие силы термоуправляемых пружин также резко уменьшаются, и общая длина каждого пружинного узла 11 увеличивается за счет расталкивающих сил витков стальных пружин 4.7.5. В результате происходящих процессов головной направляющий конус 1 и передняя манжета 3 будут вытолкнуты вперед на величину суммарной деформации шести групп ходовых пружинных узлов 11. Контроль перемещения ведется бортовым компьютером 15 по сигналам одометра 10г, размещенного в переднем направляющем конусе 1. По окончании требуемого перемещения компьютер 15 инициирует торможение передней манжеты 3 и последней манжеты 9. Если требуется контроль стенки трубы в продольном направлении, то производится торможение манжеты 4. После этого производится тестирование стенки трубы, как это было рассмотрено ранее. Далее процесс периодически повторяется. В процессе движения подвижного модуля 1.0 по трубе 8.0 на экране дисплея компьютера 3.0 будет наблюдаться картина изменений поперечного сечения трубы и картина распределения этих изменений по длине трубы (Фиг.7a…7h). Если внутренние размеры поперечного сечения трубы не изменяются, на экране будут наблюдаться изображения двух окружностей: одна, соответствующая результатам измерений передней группы микроэхолокаторов 12, и вторая - как результат работы кормовой группы микроэхолокаторов 13. В нижней части экрана может быть отображена картина изменения размеров трубы на пройденных участках (например, по положительному отклонению от оси абсцисс т может отображается вертикальный диаметр трубы, по отрицательному отклонению - горизонтальный). В тот момент, когда подвижный модуль 1.0 приблизится к отводу, например вертикальному, передняя группа микроэхолокаторов 12 обнаружит наличие пространства, из которого не поступает эхосигнал. На экране дисплея компьютера 3.0 это отобразится в виде подковы (слева), обращенной открытым концом в сторону отвода (Фиг.7b). По данным от микроэхолокаторов оператором наземного компьютера 3.0 оценивается диаметр обнаруженного отвода. Если требуется обследовать обнаруженный отвод, то оператор выдает с наземного компьютера 3.0 (Фиг.1) команду на совершение поворота и сообщает цифровое значение диаметра отвода. Эта команда и данные через радиомодемы 5.0 и 14 поступают на бортовой компьютер 15, который инициирует процедуру вхождения в отвод. Процедура поворота и вхождения в отвод реализуется по следующему алгоритму. Сначала уменьшается диаметр первой опорно-ходовой манжеты 3 и, следовательно, переднего направляющего конуса (Фиг.7b) и осуществляется отклонение конуса в ту сторону, где расположен отвод (Фиг.7 с). Координаты направления поворота сохраняются в памяти бортового компьютера 15. После этого осуществляется пошаговое перемещение вперед. В некоторой позиции подвижного модуля 1.0 два противоположных эхолокатора перестанут получать отраженный сигнал от стенок отвода и основной трубы, так как их излучения будут распространяться вдоль осей трубы и отвода (Фиг.7с). В этот момент инициируется уменьшение диаметра второй опорно-ходовой манжеты 4 и осуществляется ее отклонение ее продольной оси в ту же сторону, в какую был отклонен направляющий конус (Фиг.7d). При продолжении продольного перемещения направляющий конус упирается в стенку трубы-отвода. В этот момент на экране дисплея наземного компьютера 3.0 появится изображение сильно искаженного овала, так как один из противоположных эхолокаторов будет принимать сигналы от приблизившейся стенки, а второй будет принимать отраженные сигналы от появившейся в зоне его обзора противоположной стороны стенки отвода (Фиг.7е). На этом этапе перемещения начинается уменьшение диаметра третьей опорно-ходовой манжеты и изменение ее ориентации относительно продольной оси основной трубы 8.0 в сторону отвода. После нескольких шагов проталкивания подвижного модуля передний направляющий конус 1 примет ориентацию, практически совпадающую с продольной осью трубы-отвода (Фиг. 7f). Это определяется по сравнению изображений на экране от передней и задней групп микроэхолокаторов 12 и 13. По сигналам заднего одометра 10к бортовой компьютер 15 определяет величину перемещения подвижного модуля 1.0 от позиции, в которой было обнаружено вхождение направляющего конуса в отвод (Фиг.7е). Когда перемещение достигнет величины, равной двум расстояниям между опорно-ходовыми манжетами, прекращается режим отклонения оси первой опорно-ходовой манжеты 3. После дальнейшего изменения пройденного пути еще на половину расстояния между опорно-ходовыми манжетами в процесс перемещения включаются первая (головная) 3 и вторая 4 опорно-ходовые манжеты и уменьшается диаметр четвертой опорно-ходовой манжеты 5. Работая синхронно с остальными опорно-ходовыми манжетами, опорно-ходовые манжеты 3 и 4 обеспечивают втягивание в отвод третьей опорно-ходовой манжеты 5. Оценка изменения расстояний производится по головному одометру 10г. После дополнительного изменения пути на дистанцию между манжетами (строительная величина расстояния между манжетами), оговариваемую документацией, бортовой компьютер 15 инициирует уменьшение до минимума диаметров опорно-ходовых манжет 6, 7, 8. В процессе пошагового перемещения теперь участвуют опорно-ходовые манжеты 3, 4 и 9. По мере изменения пройденного расстояния на величину, соответствующую конструкторским данным, на расстояние между двумя опорно-ходовыми манжетами, изменяется ориентация продольной оси очередной манжеты относительно продольной оси основной трубы. Для манжеты, вошедшей в отвод по оценке изменения расстояний, восстанавливается исходная ориентация. В тот момент, когда программа бортового компьютера 15 вычислит по показаниям одометра 10к, что в отвод втянулись 3, 4, 5, 6, 7 опорно-ходовые манжеты и в основной трубе остались только 8 и 9 опорно-ходовые манжеты, бортовой компьютер 15 выдает контроллерам 18 опорно-ходовых манжет 8 и 9 команду на минимизацию их диаметров и изменение ориентации их продольных осей относительно продольной оси трубы 8.0. Вся тяга переключается на опорно-ходовые манжеты, вошедшие в трубу-отвод. Кормовой одометр 10к будет выдавать неустойчивые сигналы до тех пор, пока задний направляющий конус не войдет в трубу. Появление устойчивого сигнала одометра 10к является условием для отключения усилий отклонения опорно-ходовой манжеты 9. Этот момент определяется оператором наземного компьютера 3.0 по появлению на экране дисплея окружностей одинакового диаметра (Фиг.7b). С этого момента процесс работы устройства будет идентичен рассмотренному ранее для движения по основной трубе. Отдельные операции, требуемые при входе в отвод, исполняются следующим образом:
1. Исполнение команды на уменьшение диаметра первой опорно-ходовой манжеты достигается прекращением подачи импульсов электрического тока в пружины 4.7.6 прижимных пружинных модулей 4.7 первой опорно-ходовой манжеты 3. Диаметр манжеты уменьшается до предельно малого. Таким же образом исполняется команда уменьшения диаметра J-й манжеты, но с выдачей компьютером этой команды в адрес 18 контроллера J-й манжеты, управляющего работой прижимных пружинных узлов 4.7
2. Для изменения ориентации продольной оси J-й опорно-ходовой манжеты относительно продольной оси трубы бортовой компьютер 15 определяет номера (нумерация для нашего примера от 0 до 7) микроэхолокаторов, на которые не пришли отраженные сигналы. Нумерация микроэхолокаторов 12 и 13 в группе осуществляется по окружному периметру подвижного модуля и соответствует нумерации по окружности всех продольных линий, по которым расположены ходовые пружинные модули 11. Для изменения ориентации продольной оси J-й манжеты необходимо уменьшить ее диаметр и создать силу, которая притянула бы один край J-й манжеты к другой (J+1)-й манжете. По этой причине бортовой компьютер 15 начинает сжимать те пружинные модули 11, номера которых соответствуют номерам микроэхолокаторов, не получивших из трубы-отвода отраженные сигналы (в нашем примере - это верхний ряд ходовых пружинных модулей 11). При этом опорно-ходовая манжета поворачивается в нужную сторону. Для возвращения манжеты в исходное положение прерывается подача электрического тока в соответствующие ходовые пружинные модули 11, после чего упругость пружин 4.7.6 уменьшается и стальные пружины 4.7.5 восстанавливают габаритную длину соответствующего ходового пружинного модуля 11. Опорно-ходовая манжета примет нормальное положение вдоль оси трубы.
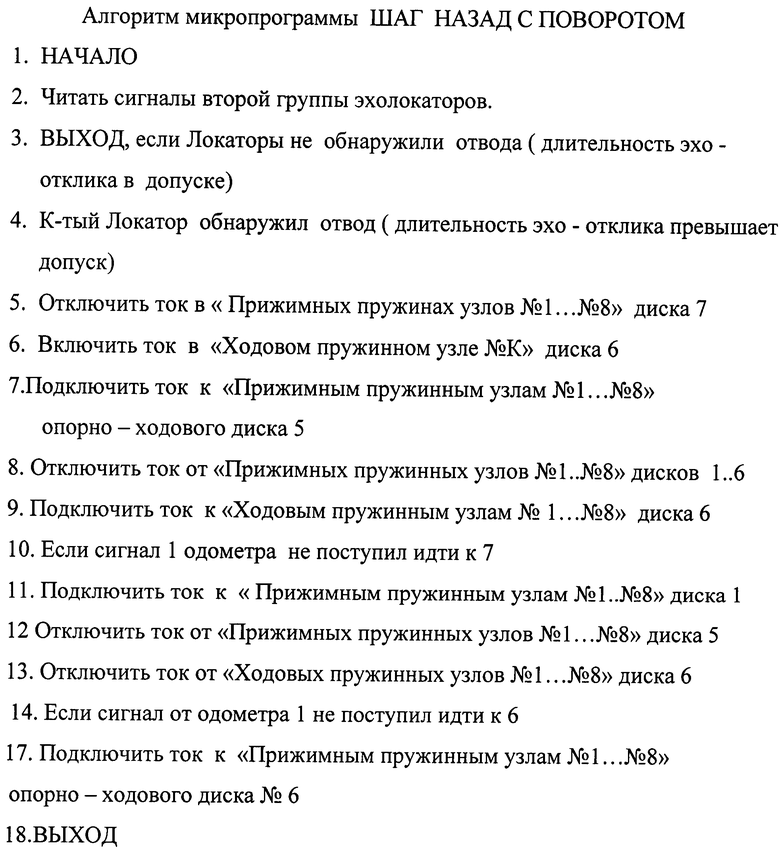
3. Управление продольным перемещением осуществляют соответствующие контроллеры 18 опорно-ходовых манжет. Упрощенные алгоритмы управляющих микропрограмм приведены в Приложении 1.
В процессе продольного перемещения движущийся внутри трубы 8.0 или в отводе 9.0 подвижный модуль 1.0 увлекает за собой трос 4.0, который сматывается с расторможенного барабана лебедки 2.0 (Фиг.1). Датчик натяжения 7.0 троса 4.0, установленный на лебедке, формирует сигнал пропорционально усилию, с которым трос сматывается с барабана лебедки. Этот сигнал поступает в компьютер 3.0. Компьютер 3.0 формирует сигнал управления двигателем электропривода 6.0 лебедки 2.0 так, чтобы натяжение троса 4.0 всегда осуществлялось с минимальным усилием. В определенный момент тяговый модуль 1.0 достигает окна отвода 9.0 и входит в отвод, как это было рассмотрено. Прикрепленный к рым-болту 17 подвижного модуля 1.0 кевларовый трос тянется за подвижным модулем. Кевлар обладает низким коэффициентом трения скольжения, что снижает тормозящее усилие, возникающее от трения троса на ребре сопряжения трубы-отвода 9.0 с основной трубой 8.0. При окончании обследования отвода оператор наземного компьютера 3.0 выдает команду СТОП и затем - ВОЗВРАТ. Команда ДВИЖЕНИЕ НАЗАД исполняется таким же образом, как команда ДВИЖЕНИЕ ВПЕРЕД. Отличие состоит в последовательности включения режимов торможения опорно-ходовых манжет и их подтягивания друг к другу. Для движения в обратную сторону жестко фиксируется последняя опорно-ходовая манжета 9 и ослабляется торможение манжет 8, 7, 6, 5, 4, 3. Инициируется стягивание всех ходовых пружинных модулей 11. При этом манжеты сближаются и направляющий конус 1 подтягивается к неподвижному направляющему конусу 2. По равенству величины оценки перемещения одометра 10г, заданному в рабочей программе значению шага перемещения направляющего конуса 1 в сторону направляющего конуса 2 бортовой компьютер инициирует фиксацию положения опорно-ходовой манжеты 3 и прекращение торможения опорно-ходовой манжеты 9. При прекращении токового импульса в пружинах 4.7.6 и в пружинно-ходовых узлах 11 размеры пружинно-ходовых узлов восстанавливаются до исходного значения и опорно-ходовая манжета 9 вместе с направляющим конусом 2 передвигаются в сторону открытого окна трубы (или к месту соединения отвода 9.0 с основной трубой 8.0). Процесс периодически повторяется. Для выхода из отвода 9.0 с поворотов в нужную сторону основной трубы 8.0 используется информация о направлении поворота, зарегистрированная при входе в отвод ранее, или используется картина изменений радиусов труб, получаемая от микроэхолокаторов 12 и 13. Подвижный модуль 1.0 может случайным образом вращаться вокруг продольной оси. Угол поворота оценивается по показаниям специальных датчиков угла продольного поворота (на рисунках не показаны). Эти датчики могут входить в состав бортового компьютера 15. Информация о текущем угле поворота подвижного модуля 1.0 вокруг продольной оси используется для вычисления направления поворота подвижного модуля 1.0. При этом используются хранящиеся в памяти бортового компьютера сведения о направлении последнего поворота, проведенного при прямом ходе подвижного модуля 1.0. Когда эхолокаторы 13 обнаружат выход в основную трубу 8.0, отключаются прижимные пружинные узлы 4.7 опорно-ходовой манжеты 9. Диаметр опорно-ходовой манжеты 9 устанавливается минимальным. В качестве манжеты, формирующей процесс движения, теперь используется манжета 8. Бортовой компьютер 15 оценивает изменение пройденного пути по показаниям одометра 10г. Когда путь изменится на величину, равную расстоянию между опорно-ходовыми манжетами в невозмущенном их состоянии (соответствующему конструкторской документации), из процесса формирования движения исключается манжета 8 и формируется усилие поворота в нужную сторону манжеты 9 и направляющего конуса 2. Поворот начинается при выходе направляющего конуса 1 из отвода 9.0 в основную трубу 8.0. Для поворота выдается импульс тока в соответствующий пружинный ходовой узел 11, прикрепленный к опорно-ходовой манжете 9. Направляющий конус 2 поворачивается в нужную сторону. После очередного изменения пройденного пути на величину заданного перемещения исключается из процесса формирования перемещений опорно-ходовая манжета 7 и инициируется пространственный поворот опорно-ходовой манжеты 8. Вместе с опорно-ходовой манжетой 8 будет поворачиваться и прикрепленная к ней манжета 9, и направляющий конус 2. Такая последовательность действий будет продолжаться до момента, когда в трубе-отводе 9.0 останутся только две манжеты: опорно-ходовая манжета 4 и опорно-ходовая манжета 3 с направляющим конусом 1. В этот момент отключаются ходовые пружинные узлы 11, задающие отклонение осей опорно-ходовых манжет 9, 8, 7, 6. Затем бортовой компьютер 15 выдает в контроллеры 18 опорно-ходовых манжет 8 и 9 команды на увеличение диаметра этих манжет. Толкатели 4.4 в манжетах выталкиваются термоуправляемыми пружинами 4.7.6 из пазов опорно-ходовых манжет 8 и 9. Опорно-ходовые манжеты перекрывают полностью окно поперечного сечения трубы 8.0. В контроллеры 18 манжет 3 и 4 выдается из бортового компьютера 15 команда, инициирующая минимизацию размеров опорно-ходовых манжет 4 и 3. Контроль изменений пройденного расстояния после этого ведется по показаниям одометра 10к. При выходе опорно-ходовой манжеты 3, а затем и 4 в основную трубу отключается поворот оси соответствующей опорно-ходовой манжеты. После оценки по изменениям пройденного пути нахождения в основной трубе всех опорно-ходовых манжет восстанавливается ориентация всех манжет по оси трубы 8.0. Далее движение формируется с использованием всех опорно-ходовых манжет по рассмотренному принципу. При обратном движении подвижного модуля 1.0 трос 4.0 может провиснуть и попасть под наползающие на него опорно-ходовые манжеты. Этого не происходит благодаря автоматической регулировке натяжения троса, осуществляющейся автоматической системой, реализованной в лебедке 2.0 с использованием управляемого электропривода 6.0 с датчиком усилия натяжения 7.0 и компьютера 3.0. Если на борту подвижного модуля 1.0 иссякли источники электропитания при нахождении подвижного модуля 1.0 в трубе 8.0 или в трубе-отводе 9.0, то все опорно-ходовые манжеты переводятся пружинами 4.7.5 в состояние с минимальным наружным диаметром и снаряд может быть извлечен из трубы с помощью прикрепленного к его рым-болту 17 кевларового троса 4.0. При извлечении искривление подвижного модуля на поворотах будет принудительным за счет изгиба пружин пружинно-ходовых узлов 11 силой тянущего троса 4.0. После завершения диагностики всех отводов подвижный модуль 1.0 выходит из трубы 8.0 Данные, хранящиеся в памяти бортового компьютера 15, могут быть использованы для анализа состояния стенок основной трубы 8.0 и трубы-отвода 9.0.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКАНИРУЮЩИЙ ДЕФЕКТОСКОП | 2009 |
|
RU2402760C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ТРУБОПРОВОДА | 2009 |
|
RU2390769C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СТЕНОК ТРУБОПРОВОДОВ | 2011 |
|
RU2453835C1 |
| НАРУЖНЫЙ СКАНИРУЮЩИЙ ДЕФЕКТОСКОП | 2013 |
|
RU2539777C1 |
| КОМПЛЕКС ВНУТРИТРУБНОЙ ДЕФЕКТОСКОПИИ С ТРОСОВОЙ ПРОТЯЖКОЙ | 2015 |
|
RU2586258C1 |
| КОМПЛЕКС ДЛЯ ПОЛУНАТУРНЫХ ИСПЫТАНИЙ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ ВНУТРИТРУБНЫХ ИНСПЕКТИРУЮЩИХ СНАРЯДОВ | 2012 |
|
RU2511057C1 |
| ВНУТРИТРУБНЫЙ ПРОФИЛОМЕТР | 2014 |
|
RU2572221C1 |
| НАВИГАЦИОННО-ТОПОГРАФИЧЕСКИЙ ВНУТРИТРУБНЫЙ ИНСПЕКТИРУЮЩИЙ СНАРЯД | 2007 |
|
RU2321828C1 |
| РЕГУЛЯТОР СКОРОСТИ ПЕРЕМЕЩЕНИЯ ВНУТРИТРУБНЫХ ИНСПЕКТИРУЮЩИХ СНАРЯДОВ | 2013 |
|
RU2533754C1 |
| УСТРОЙСТВО ДЛЯ НАМАГНИЧИВАНИЯ СТЕНОК ТРУБ ДЕЙСТВУЮЩИХ ТРУБОПРОВОДОВ | 2006 |
|
RU2304279C1 |



Использование: для дефектоскопии технологических трубопроводов. Сущность изобретения заключается в том, что комплекс дефектоскопии технологических трубопроводов состоит из: подвижного модуля, бортовой электронной аппаратуры, бортового компьютера; датчиков дефектов; одометров; троса; наземной лебедки с барабаном для троса; бортового источника электропитания; наземного компьютера; при этом в него ведены: первый и второй направляющие конусы, несколько опорно-ходовых манжет, несколько групп ходовых пружинных узлов (ХПУ), несколько групп прижимных пружинных узлов (ППУ), несколько групп ультразвуковых датчиков системы неразрушающего контроля (УДСНК), несколько групп толкателей, несколько ультразвуковых эхолокаторов, несколько контроллеров управления прижимными пружинными узлами, несколько контроллеров управления ходовыми пружинными узлами, первый радиомодем, второй радиомодем, несколько контроллеров управления ультразвуковыми датчиками системы неразрушающего контроля (КУУДСНК). Технический результат: обеспечение возможности создания простого с точки зрения механики комплекса для внутритрубного контроля состояния технологических трубопроводов произвольной ориентации, открытых с одного конца, а также контроля труб-отводов произвольной пространственной ориентации при удаленном расположении отвода от открытого конца основного трубы. 7 ил.
Комплекс дефектоскопии технологических трубопроводов, состоящий из: подвижного модуля, бортовой электронной аппаратуры, бортового компьютера; датчиков дефектов; одометров; троса; наземной лебедки с барабаном для троса; бортового источника электропитания; наземного компьютера; отличающийся тем, что в него ведены: первый и второй направляющие конусы, несколько опорно-ходовых манжет, несколько групп ходовых пружинных узлов (ХПУ), несколько групп прижимных пружинных узлов (ППУ), несколько групп ультразвуковых датчиков системы неразрушающего контроля (УДСНК), несколько групп толкателей, несколько ультразвуковых эхолокаторов, несколько контроллеров управления прижимными пружинными узлами, несколько контроллеров управления ходовыми пружинными узлами первый радиомодем, второй радиомодем, несколько контроллеров управления ультразвуковыми датчиками системы неразрушающего контроля (КУУДСНК), причем подвижный модуль состоит из двух направляющих конусов и группы опорно-ходовых манжет, а направляющий конус и корпус опорно - ходовой манжеты выполнены из эластичного упругого материала, ходовой пружинный узел и прижимной пружинный узел состоят из обычной пружины и термоуправляемой пружины из материала с памятью формы, причем в ходовом пружинном узле термоуправляемая пружина «помнит» сжатое состояние, а в прижимном пружинном узле термоуправляемая пружина «помнит» растянутое состояние; при этом направляющий конус выполнен в виде многолепестковой конструкции, в носовой части которой в каждом лепестке установлены микроэхолокаторы, а в полости первого направляющего конуса установлены бортовой компьютер и источник питания, в центральной полости опорно-ходовой манжеты размещены контроллер управления ходовыми и прижимными пружинными узлами, а также контроллер управления ультразвуковыми датчиками системы неразрушающего контроля, а в радиальных пазах опорно-ходовой манжеты установлены толкатели и прижимные пружинные узлы, а к дисковым поверхностям опорно-ходовых манжет крепятся ходовые пружинные узлы, причем первый направляющий конус соединяется своими лепестками с соответствующими толкателями опорно-ходовой манжеты, на наружных торцах которой крепятся ультразвуковые датчики системы неразрушающего контроля, поверх которых устанавливаются упругие пластичные накладки, а противоположные торцы толкателей соединены с первыми фланцами соответствующих прижимных пружинных узлов, опирающихся вторыми фланцами в корпус опорно-ходовой манжеты, с задней дисковой крышкой которой соединены первым фланцем соответствующие ходовые пружинные узлы, вторые фланцы которых соединены с передней дисковой крышкой следующей опорно-ходовой манжеты, к задней дисковой крышке которой прикреплены соответствующие ходовые пружинные узлы и так далее до последней опорно-ходовой манжеты, к соответствующим толкателям которой прикреплены лепестки второго направляющего конуса, в торце которого установлен рым-болт, соединенный с выходом антенны второго радиомодема, установленного в полости второго направляющего конуса и электрически соединенного с соответствующими выводами бортового компьютера, соответствующие выводы которого соединены с интерфейсными входами всех контроллеров, управляющих работой ходовых и прижимных пружинных модулей, и со входами управления и обмена информацией контроллеров, управляющих работой ультразвуковых датчиков системы неразрушающего контроля, соответствующие выводы которых соединены с соответствующими выводами соответствующих ультразвуковых датчиков системы неразрушающего контроля, а электрические выводы термоуправляемых пружин ходовых и прижимных пружинных узлов соединены с соответствующими выводами контроллеров управления пружинными узлами; первый радиомодем размещен на открытом конце обследуемого трубопровода и его выводы соединены с соответствующими выводами наземного компьютера, к соответствующим информационным входам которого подключены выводы датчика натяжения троса, намотанного на барабан лебедки, контрольно-управляющие выводы электропривода которой соединены с соответствующими выводами наземного компьютера, при этом трос охватывает ролик датчика натяжения троса, а второй конец троса соединен с рым-болтом подвижного модуля.
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2418234C1 |
| УСТРОЙСТВО ВНЕСЕНИЯ/ВЫДАЧИ БАНКНОТ И УСТРОЙСТВО ТРАНЗАКЦИИ С БАНКНОТАМИ | 2014 |
|
RU2633271C2 |
| Способ измерения коэрцитивной силы постоянных магнитов | 1945 |
|
SU66547A1 |
| US 4443948A, 24.04.1984 | |||
| US 2008011063A1, 17.01.2008 | |||
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ СВАРНЫХ СТЫКОВ РЕЛЬСОВ | 2005 |
|
RU2309402C2 |

