Изобретение относится к гидроавтоматике и может быть использовано, например, в системах управления судовыми пароэнергетическими установками.
Известен многоканальный электрогидравлический привод с коррекцией, содержащий исполнительные механизмы с датчиками обратной связи, каналы управления по числу исполнительных механизмов, включающие последовательно соединенные задатчик, сравнивающий усилитель, электромеханический преобразователь и гидроусилитель, связанный с одним из исполнительных механизмов, а также кворум-элемент, входы которого связаны с датчиками обратной связи исполнительных механизмов, а выход - с каналами управления, и механическое суммирующее устройство, связанное с исполнительными механизмами и объектом регулирования, датчик положения которого соединен со сравнивающими усилителями 1.
Недостатками известного привода являются низкие точность и надежность вследствие возможности отказа всегр привода при отказе одного из исполнительных механизмов.
Цель изобретения - повышение точности и надежности.
Указанная цель достигается тем, что механическое суммирующее устройство выполнено в виде плоского равностороннего треугольника, вершины которого шарнирно соединены с исполнительньими механизмами, а геометрический ценгр - с объектом регулирования, при этом каждый канал управления снабжен блоком коррекции, выполненным в виде сравнивающего устройства I входы которого соединены с выходами кворум-элемента и датчика обратной связи соответствующего канала, а выход - со сравнивающим усилителем того же канала.
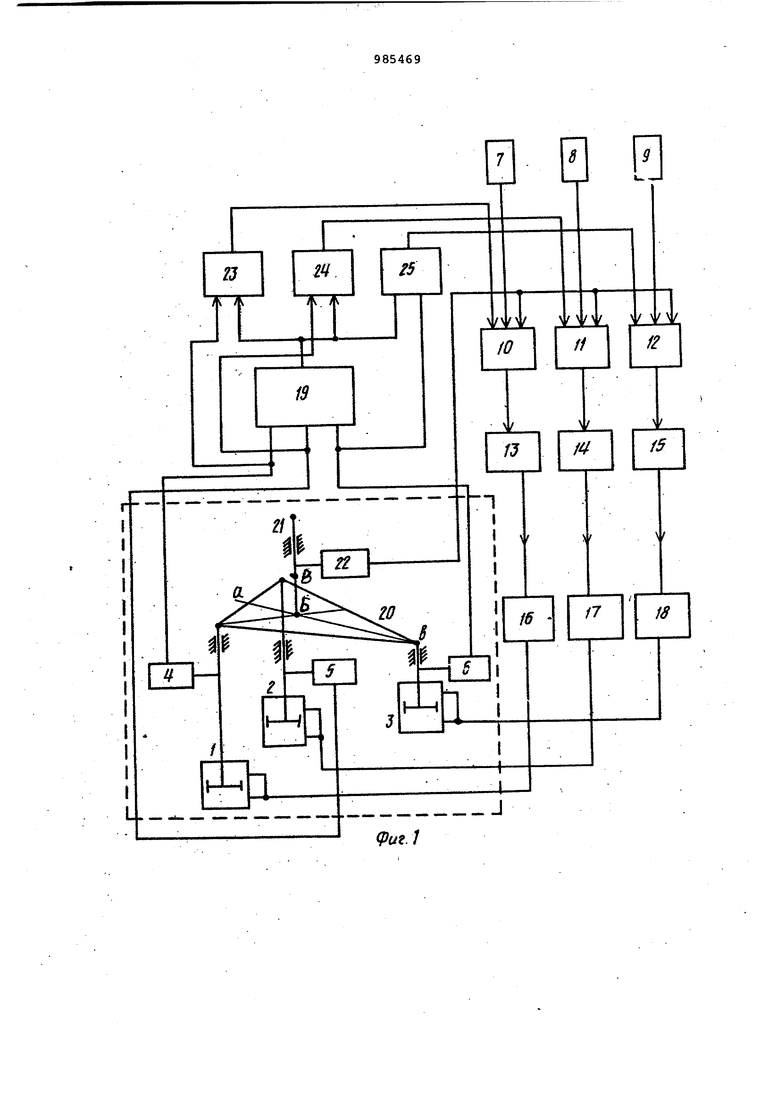
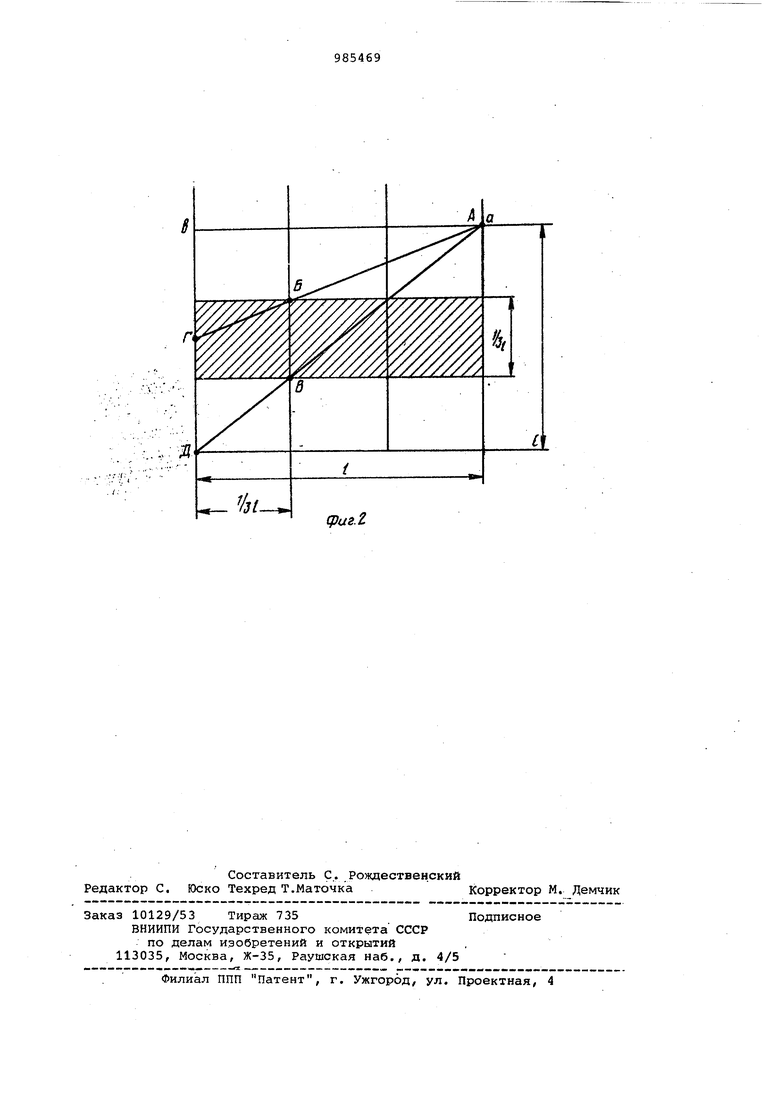
На фиг. 1 изображена схема многоканального электрогидравлического привода с коррекцией, на фиг. 2 график перемещения точек, расположенных на высоте аЪ равностороннего треугольника.
Привод содержит исполнительные механизмы 1-3 с датчиками 4-6 об- . ратной связи соответственно, каналы управления по числу исполнительных механизмов, включающие соответственно последов.ательно соединенные задатчики 7-9, сравнивающие усилители 10-12 постоянного тока, электромеха нические преобразователи 13-15 и гид роусилители 16-18, связанные с исполнительными механизмами 1-3 соответртвенно, а также кворум-элемент входы которого связаны с датчиками 4-6 и механическое суммирующее устройство, выполненное в виде плоского равностороннего треугольника 20, вер шины которого шарнирно соединены с исполнительными механизмами 1-3, а геометрический центр - с объектом 21 регулирования, датчик 22 положения которого соединен с усилителями 10-12, при этом каналы управления снабжены блоками коррекции, выполнен ными в ниде сравнивающих устройств 23-25, входы которых соединены с выходами кворум-элемента 19. и датчиков 4-6 соответственно, а выходы - с уси лителями 10-12 соответственно. Полный ход каждого из исполнитель ных механизмов 1-3 выполнен в три раза большим, чем полный ход объекта 21 регулирования. Многоканальный электрогидравлический привод с коррекцией работает следующим образом. Сигналы задания, пропорциональные требуемому значению положения объекта 21 регулирования от задатчиков 7-9, поступают на входы усилителей 10-12, где они сравниваются с сигна лами датчиков 4-6 обратной связи, пропорциональными фактическому положению исполнительных механизмов 1-3 Усиленные сигналы рассогласования поступают на электромеханические пре образователи 13-15, с которыми связаны гидроусилители 1б-18. При наличии напряжений на выходах усилителей 10-12 начинают перемещаться исполнительные.механизмы 1-3, которые изменяют положение качающегося треугольника 20, с которым шарнирно связан объект 21 регулирования. Перемещение происходит до тех пор пока сигнал положения, вырабатываемый датчиком 22, не сравняется с сигналом задания. В Каждом канале осуществляется выявление неисправности с .помощью кворум-элемента 19 и сравнивающих устройств 23-25. На входы кворумэлемента 19 поступают сигналы с датчиков 4-6. В кворум-элементе 19 вырабатывается средний по величине сиг нал, который устройствами 23-25 сравнивается с сигналами датчиков 4-6 соответственно. С выходов усттройств 23-25 сигналы рассогласования подаются как корректирующие на усилители 10-12 соответственно для обеспечения синхронной работы всех каналов. В случае увеличения сигнала рассо.г4;а ования одного .., из каналов до определенной, наперед заданной величины, в соответствующем сравнивающем устройстве канала вырабатывается сигнал на oтк Jючeниe этого канала и сигнализация об этом обслуживающему персоналу. При этом исполнительный механизм вышедшего из строя канала может занять любое (в том числе крайнее) положение. При выходе из строя одного из каналов, например перемещения его ис полнительного механизма вверх до упора (точка А на фиг. 2), рабочий диапазон Б-В перемещения объекта регулирования 21 обеспечивается при перемещении оставшихся в работе каналов в диапазоне Г-Д (фиг. 2). Нормальная работа привода обеспечивается при любом зафиксированном положении одного из исполнительных механизмов. Использование предлагаемого изобретения позволит повысить точность и надежность систем управления судовыми пароэнергетическими установками. Формула изобретения Многоканальный электрогидравлический привод с коррекцией, содержащий исполнительные механизмы с датчиками обратной связи, каналы управления по числу исполнительных механизмов, включаначие последовательно соединенные задатчик, сравнивающий усилитель, электромеханический преобразователь и гидроусилитель, связанныйс одним из исполнительных механизмов, а также кворум-элемент, входы которого связаны с датчиками обратной связи исполнительных механизмов, а вьдход с каналами управления, и механическое суммирующее устройство, связанное с исполнительными механизмами и объектом регулирования, датчик положения которого соединен со сравнивающими усилителями, отличающийся тем, что, с целью, повышения точности и надежности механическое суммирующее устройство выполнено в виде плоского равностороннего треугольника, вершины которого шарнирно соединены с исполнительными механизмами, а геометрический центр с объектом регулирования, при этом каждый канал управления снабжен блоком коррекции, выполненным в виде сравнивающего устройства, входы которого соединены с выходами кворумэлемента и датчика обратной связи соответствующего канала, а выход со сравниваю1(им усилителем того же канала. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 416466, кл. F 15 В 9/17, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОКАНАЛЬНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 1972 |
|
SU335446A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1999 |
|
RU2161579C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ МОЩНОСТИ ЭНЕРГОБЛОКА | 2003 |
|
RU2258146C1 |
| Многоканальный электрогидравлический привод | 1991 |
|
SU1772432A1 |
| СИСТЕМА УПРАВЛЕНИЯ МНОГОКАНАЛЬНЫМ ВИБРОСТЕНДОМ | 1998 |
|
RU2159949C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД ОБЪЕМНОГО РЕГУЛИРОВАНИЯ | 2007 |
|
RU2347952C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД ДРОССЕЛЬНОГО РЕГУЛИРОВАНИЯ | 2007 |
|
RU2347949C1 |
| Устройство для автоматического контроля и управления самоходной уборочной машиной | 1977 |
|
SU701569A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1988 |
|
RU2119185C1 |