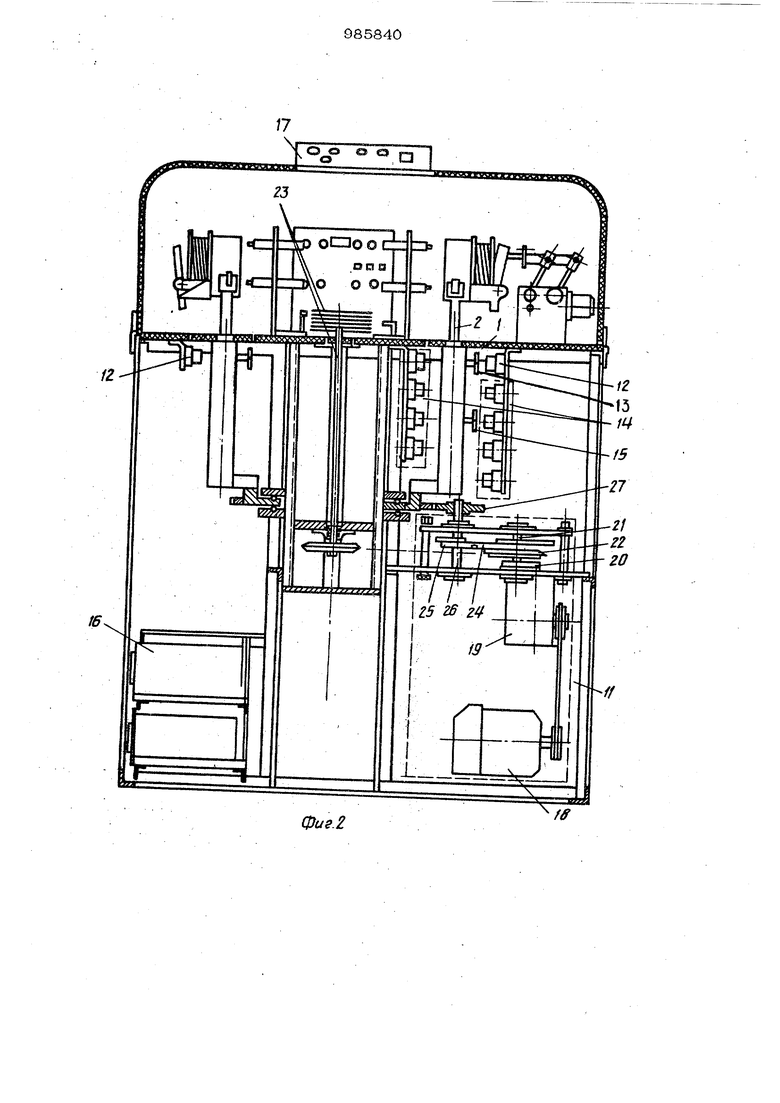
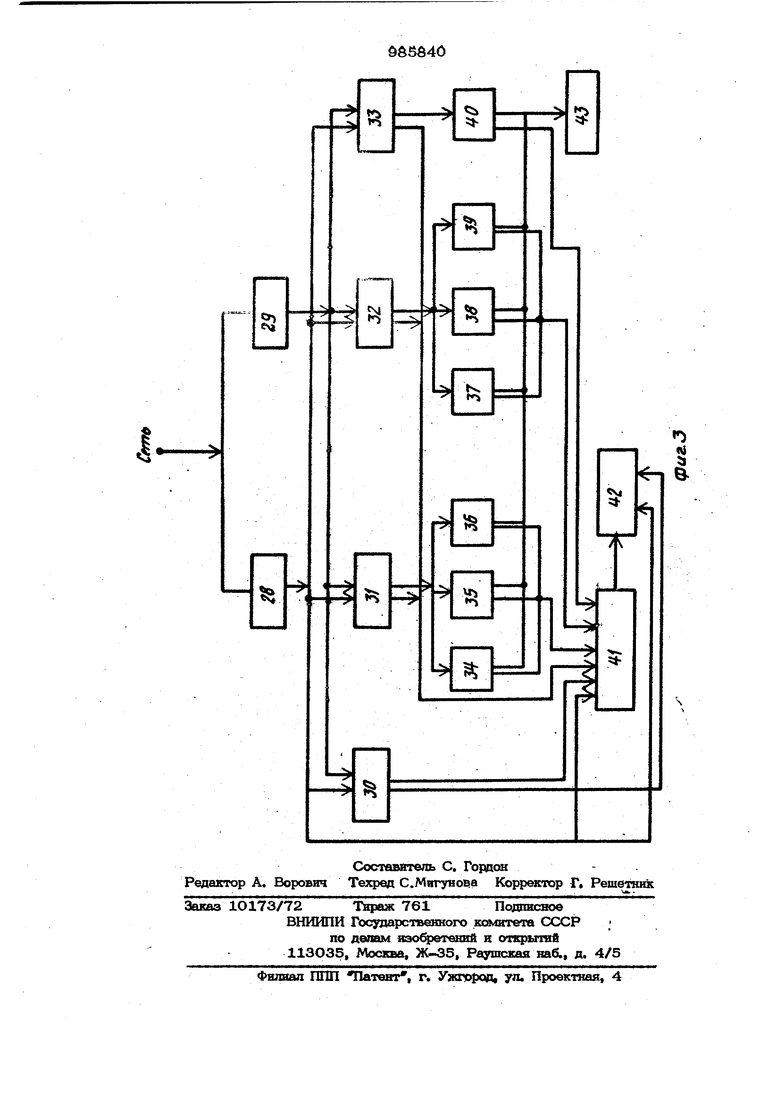
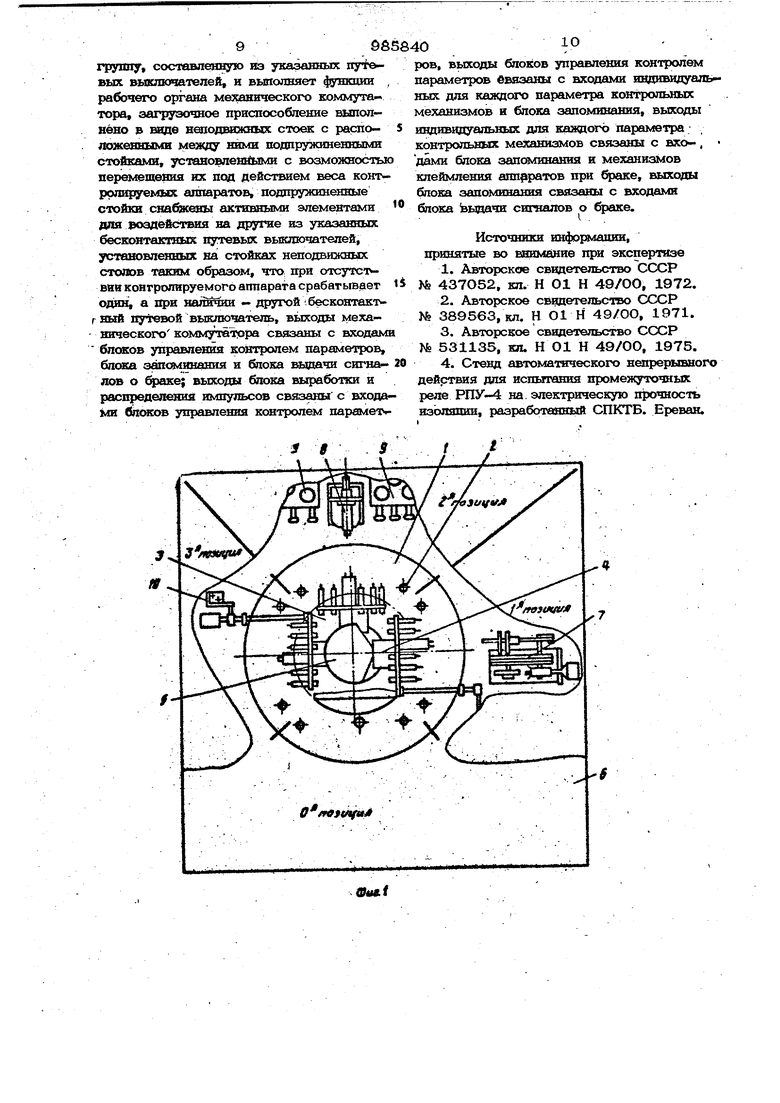
(54) АВТОМАТИЧЕСКИЙ СТЕНД ДЛЯ КОНТРОЛЯ ЭЛЕКТРИЧЕСКИХ АППАРАТОВ 1 Изобретение относится к эпектротехвике и может быть использовано при разработке средств автоматического x.c№S роля параметров крнтакторов я ядентичнзых им аппаратов массового производс ва. Согласш ГОСТ 2933-74 Аппараты эпек1ри:4Ьские ва вапряжёяие до 1ООО В Методы испытания проверка осношп 1Х параметров контакторов я идентичных им аппаратов в процессе пряемно-сдаточных испытаний произвйуфятсв либо путем иЯ: вязуально- :луховой, оцезоси (четкость сра батыва ния, тврежение размыкания размыкающих вспомогательных ковтактьв относитешзно замыЕ:ания главных тов, cnoco octb к удержанию яЕоря rtpa снижении напраже няя а катушке вибрация яксфя), днбо с помощью ручного мерительного ш трумен-га (шабоонов я ка либров при контроле {застворов и провалов контакзч в« jpg«q oMnn|ip при кошр ле контактных нажатий) и т.п. Известно устройство для автоматичЕеокого КОН1РОЛЯ четкости cpaGEtniBQaEiHa и отбраюэвки эаектрж юскнх аппаратов, в KtyfopoM тфедускютр ш трехкратная автоматическая псщача кжштроаьйоых жмЮульсов напряжения на катушку ковтролирув- мого ашсараФа щхжзааоаится. як учет и последукхцее сравнение с колнчестао14 фактическвос срабатываний висва аЛе щя совпадения количества ЛП ЙЕШНЫХ кмп Юасов с количестЕиях фЕостическях срабатываний аппарата устро твом выдерется снгяал о годности, itps нессжпадении - сигявл о бреак& аюшрата по даннооуцг ковтрсйшруемому параметру tl3 . Известны также устройсчш автомаФВ)ческого контроля нажатий на контактах электрических аппар&товв С2Л,ГЗ , Известны анайогвчныз ршнешш я по другим napA«etpaM. Все эти охкёльаые устройства имЕеют соответствующие шпнвцдуалавью датчики и мт урп уТу эдЯИ контрольные схемы, яозволяюоше ajsTo матязировать прсщессы колсропя этях отдельных параметров. Однако поскольку эти устройства не имеют мезвду собой никакой взаимосвязи, они не находят практического применения, так как про иэводительносчь контроля при их испольэовании рказывается крайне низкой из-еа необходимости вьшолнения целого.р5эда технологических переходов (перестановка аппаратов с одного устройства на другое их подключение и т.п.}, на которые за трачнвается значительное технологическое }емя. Наиболее близким по технической суш ностк к предлагаемому является автоматический стенд для контроля электрических аппаратов, содержащий бесконечную транспортную систему, вьшолненную в вдде дискретно вращающегося cTonai с расположенными на нем загрузочными приспособлениями для размещения конт ролируемых аппаратов, приводимую от приводного электродвигателя, а также индиввдуалыше для каждого параметра контрольные механизмы, включающие контактные узлы, датчики и механизмы для их перемещения С4 .. Недостатком указанного устройства является низкая производительность KOHT роля за счет значительных затрат времени на контроль. Цель изобретения - повьвиение производительности контроля путем сокращ&шш времши контроля. Указанная цель достигается благодар тому, что автоматический. стенд для контроля электрических аппаратов снабжен системой управления контролем, состоящей из механического коммутатор механизмов для фиксашш наличия контро лируемых аппаратов на загрузочных приспособлениях, блока выработки и распре деления импульсов, блоков управления контролем параметров, управляющюс работой индивидуальных для каждо1ч параметра контрольных механизмов, меха низмов клеймления, блока запоминания, блока выдачи сигналов о браке; дискрет но вращакшщйся стол выполнен в виде вращающегося на опорном подшипнике кольда, по обе стороны которого расположены внутренний и наружный неподыокные стошд, причем внутренний стол предназначен для размещен1{Я контактных узлов, а наружный - для размещения индивидуальных для каждого контролируемого параметра датчиков с механизмами их перемещения, механический коммутатор вьлолн 1 на базе бесконтактаоых путевых взЕЛКЛючателей, расположенных ПО периферии вращающегося ст -ла, вращающийся стол снабжен активным элеме -. том, воздействующим при определенном взаимном положении на группу, состгш- ленную из указанных путевых выключателей, и выполняют функции рабочего органа механического коммутатора, загрузочное приспособление выполнено в воде неподвижных стоек с расположенными между ними подпружиненными стойками, установленными с возможностью перемещения их под действием веса контролируемых аппаратов, подпружиненные стойки снабжены активныкш элементами для воздействия на другие из указаннзых бесконтактных путевых выключателей, устадовленных на стойках неподвижных столов таким образом, что при отсутствии контролируемого аппарата срабатывает один, а при наличии - другой бесконтактный путевой выключатель, выходы механического коммутатора связаны с входами блоков управления контролем параметров, блока запо 1инания и блока выдачи сигналов о браке; выходы блока выработки и распределения импульсов связаны с входами блоков управления контролем параметров, выходы блоков управления контролем параметров связаны с входами индивидуальных для каждого параметра конт ролышх механизмов и бцока запоминания, выходы индивидуальных для каждого параметра контрольных механизмов св5ьзаны с входами блока запоминания и клеймления аппаратов при браке, выходы блока запоминания связаны с входами блока выдачи сигналов о браке. На фиг. 1 и 2 представлен автсэ шти- ческий стенд для контроля электрических аппаратов, общий вид; па фиг. 3 - его структурная электричеслля схема. Основным элементом конструкции стенда является транспортное устройство- вращающийся стол 1 (фш. 1 и 2), выполненный в ввде вращающегося кольца с расположенными на нем четырьмя (поскольку щжмер дается для четььрехпозшшонного устройства) /Ьтоек 2 для установки контролируемьсс аппаратов. Внутри врашакякегося стола устан(жлен внутренний неподвяжнзый стол 3, по коTop /iy перемешаются три кошшпяых узла 4, приводимые кулачками 5. Снаружи вращающегося стола расположен ва ружный непояаяжныё стоя 6, на ко1х ром разметены шщивидуальные для каждого параметра кешрольнне згстройств81, состоящие из следящего ycTpofcit. л 7, предназначенного для контроля растворов и провалов контактов, устройство подвода датчика 8 вибрации для контроля вибрации якоря, устройство подвода датчиков 9 нажатий для контроля конечных нажатой wa контактах, стойки с контактными узлами 1О для подвода напряжения к вспомогательным контактам контролируемых аппаратов. Под плоскостью вращающегося и неподвижного столов расположен приводной механизм 11, предназначйпшй для привода основных кинеэлатических узлов, комплект 6есконтактш 1Х путевых выключателей 12, управляемых активным элементом (стальнымфлажком) 13,. перёмешаю1шо«1ся вместе с вращающимся столом, комплект других бесконтактных путевых выключателей 14, управляемых активным элемеятом (ставпъным флажком) 15, перемещакшщмся под действием мас. сы контролируемых аппаратов, и комплект блоков 16, в которых размещены элемент ты электрических схем контроля и управл ния, над плоскостью вращающегося и не- подвижного столов размещена панель 17 управления, на которой расположены эле- менты электрической схемы, обеспечиваю щие.ручной выбор режимов, исполнений азгшаратов, управление и другие операхши, требующие вмещательства обслуживающег персонала. Приводной механизм состоит из двига теля 18 и редуктора 19. Через зубчатую пару 2 О вращение передается валу 21, на котором насажены звездочка 22, передающая вращение с помощ&ю цепной передачи на ось кулачксж 23, и сектор 24, периодически вступающий в зацепление с щестерней 25, создавая прерывистое вращение вала 26, связанного через зубчатую пару 27 с вращающимся столом. Электрическая схема предлагаемого устройства (фиг. 3) содержит механический коммутатор 28, который предназначен для выработки электрических сигналов фиксации вращакндегося стола на позшши после предшествующего перемещения, а также наличия контролируемого аппарата на загрузочных стойках; блок 29 вьфаботки и распределения импульсов предназнач ношсй для выработки управляю щих электрических импульсов и их распределения по блокам управления процессами контроля на различных контрош ных позициях; блоки 30-33 управления KOHTW ролем параметров соответственно на 0-й, 1-й, 2-й, и 3-Й позициях стецда, предназначенный для приема 7Правл5Оощих сигналов от блока 29 и формирования временных командных сигналов для управления процессом контроля на соот ветствующих указанных позициях; блоки 34-4О контроля соответственно четкости срабатывания аппаратов, растворов и провалов контактов, опережения размыкания размыкающих вспомогателыдарс кон тактов относительно замыкания главных контактов, спбсобности аппарата к удержанию якоря, конечных нажатий на главных контактах, электрической прсучности и: оля1гаи, предназначенные для осуществления контроля указанных параметрёв по сигналам блока 31 - блоки контроля 34 - 36, блока 32 - блоки 37-39 KOHTV. роля и блока 33 - блок 4О контроля получения результирующих сигналов о браке или годности аппарата; блок 41 запоминания, предназначенный для запоминания сигналов о браке контролируемых аппаратов по какому-либо одному или группе параметров; блок 42 выдачи сигналов о браке, предназначенный для принятия сигд1ала о браке от блока запоминания и выдачи их после возвращения алшарата на загрузочно-)азгрузочную позицию по командам блока ЗО; механизмы 43 клеймления аппаратов, пре;ьназначенные для нанесения клейма на аппарат при наличии брака по одному или группе параметров по сигналам, выдаваемым непосредственно контрольными блоками 34-40. Предлагаемое устройство работает следующим образом. Вращающийся стол 1 получаетпрерывистое вращение от вала 26. При этом четырехпозидионный стенд (пара: сектор 24 - шестерня 25) и зубчатая пара 27 подобраны так, что за один оборот вала 26 вращаклцийся сшол совершает 1/4 оборота. При этом поворот стола происходит по времени неравномерно: 1/6 времени - поворот, 5/6 - вьюотой. Таким об1 азом; предлагаемым приводным устройством обеспечивается: поворот и остваношса вращакщегося стола на позициях стенда (три являются испытательными, одна - загрузочно-фазгру- зочной), сдвинутых относительно дрзгг друга на продолжительный вьютой стола на позициях, во время которого осуществляется контроль параметров контролируемых аппаратов. Привод кулачков 5, осуществляемый от того же приводного уст хэйства череэ цепную первщ&чу, обеспечивает подвод контакгшых узлов 4 к контрогофуемым аппаратам, выстой их в этом положении 798 в период контроля и возврат в исходное положение по окончании процесса контрол перед поворотом стола йа следующую позицию. Комплект бесконтактных путевы выключателей 12 размещается под плоскостью вращающегося стола по периа дарии со сдвигом относительно друг друга на .90°. В процессе работы стальной флажок 13 в момент фиксации стола на той или иной позиции, (е1цаясь вместе со сто , останавливается последовательно про тив каждого бесконтактного путевого вььключатепя; вызывая их срабатывание, т.е. вращшощийся стол с пажком 13 вместе с системой бесконтактных иуте- вых выключателей 12 выполняет функции механического коммутатора, вьщающего электрические сигналы в моменты остановок вращающегося стола на поэици5сс. Комплект бесконтактных путевых выключателей 14, управляемых стальными флажками 15, выполняет функции конечного выключателя, свидетельствующего о наличии аппарата на загрузочных стой-, ках вращающегося стола. Принцип работы электрической схемы функционально выглядит следующим образом. Блок 29 обеспечивает выработку и вы дачу управляющих импульсов по сигналам механического коммутатора 28 блокам ЗО-ЗЗ. Последние обеспечивают формирование команд (временных интервалов) и их выдачу непосредственно контрольным блокам 34-4О, обеспечивая на каждой позиции сдвиг контрольных процессов во времени. Результирующие сигналы о браке аппарата {при его наличии) по какому-либо одному или группе параметров выдаются, во-первых, на механизмы 43, обеспечивающие нанесение клейма на аппарат, и во-вторых, запоминаются в блоке 41 до момента возвраше шя аппарата на исходную (загрузочно-разгрузочную) позшшю. После возвращения аппарата на эту позицию сигнал о браке, запомненный блоком 41, по сигналу блока 30 блоюм 42 выдается Обслуживающему персоналу. Синхронизация выработки сигналов и их вьщача блоками 30-33 с дик лограммой перемещений вращающегося стопа обеспечивается механическим коммутатором 28. Таким образом, на предлагаемом четырезшоэиционном стенде обеспечиваются: автоматический последовательный контроль аппаратов на трех испытательных позициях с выдачей окончательних результатов контроля на 0-й загрузочно108раагрузочЛЕй позиции} автсхматическкй последовательный переход аппаратов с каждой испытательной позиции на последующук одновременный контроль трех аппаратов на трех испвтательных позиЕсиях (на исходаой позиции в это время выдаются результаты контроля четвертого аппарата, после чего устанавливается новый). Указанные преимущества позволяют значительно увеличить производительность контроля при сохранении его объективности по сравнению с известными ус- ройствами автоматического контроля. Фо|эмула изобретения Автоматический стенд для контроля электрических аппаратов, содержащий бесконечную транспортную систему, вь полненную в виде дискретно вращакнцегося стола с расположенными на нем загрузочными приспособлениями для размещения контролируемых аппаратов, приводимую . от приводного электродвигателя, а также индивидуальные для каждого параметра контрольные механизмы, включающие контактные узлы, датчики и механизмы для их перемещения, отличающийся тем, что, с целью повышения производительности контроля путем сокра щения времени контроля, он снабжен св стемой управления контролем, состоящей из механического коммутатора, механизмов для фиксации наличия контролируемых аппаратов на загрузочных, приспособлениях, блока отработки и распределения импульсов, блоков управления контролем параметров, управляющих работой шздявидуальных для каждого параметра конт рольных механизмов, механизмов клеймления, блока запоминания, блока вьздачи сигналов о браке, дискретно вращающийся стол вьшолнен в виде вращающегося заа опорном подщипнике кольца, по обе стороны которого расположены внутренний и наружный неподвижные столы, причем внутренний стол предназначен для размещения контактных узлов, а наружный для размещения индивЕщуальшлх для каж дого контролируемого параметра датчиков с механизмами их перемещения, механический коммутатор выполнен на базе бесконтактных путевых вьщлючателей, расположенных по периферии вращающегося стола, вращающийся стол активным элементом,- воздействующим при определенном взаимном положении на
rpyuuyt составленную из указанных выключателей, н выполняет фтнкшга , рабочего органа механического коммутатора, загрузочное приспособление выполнено в виде неподшоюшрс стоек с распо- 5 яоженными между ними подасружиненными стойзеами, установленными с возможностью перемещения гос под действием веса контролируемых ашшратов, поопружин шые СТОЙКЕ снабжены ак-швиыми элементами дин эоздёйствня на щгугяе вз указанных бескошаклшых путевых выключателей, устазювл шых на стойках неподвижных столов такнм образом, что при отсутс-овии конгропируемого аппарата срабатывает один, а при натЁчии - другой бесконтакт
ный путгевой выключатель, выходы механического коммута рра связаны с входами
блоков управления контролем параметров, блока запсминання и блока сигна- 20 лов о факе; выходы блока выработки и распределсения импульсов сззязаны с входами блсясов управления контролем napaMetv
ров, выходы блоков управления контролем параметров ввязаны с входами индивидуал ных для каждого параметра контрольных механизмов и блока запоминания, выходы
индивидуальных для каждого параметра контрольных механизмов связаны с вхо-, дами блока запоминания и механизмов клеймления аппаратов при браке, выходы блока запоминания связаны с входами блока выдачи сигналов о браке.
Источники информашга, принятые во вш1Мбние при экспертизе
1.Авторское сввдетелЕаСтво СССР
№ 437052, кл. Н О1 Н 49/ОО, 1972.
2.Авторское свадетельстгео СССР № 389563, кл. Н 01 Н 49/ОО, 1971.
3.Авторское свидетельство СССР
№ 531135, кп. Н О1 Н 49/00, 1975.
4.Стенд автомат гческого непрерывног дейртвия для испытания промежуточных реле РПУ-4 на. электрическую прочность изЬляпин, разработанный СПКТБ. Ереван.

| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытания изделий на герметичность | 1990 |
|
SU1756787A1 |
| Стенд для измерения схождения и развала колес транспортного средства | 1983 |
|
SU1147947A1 |
| Устройство для контроля параметров | 1977 |
|
SU630616A1 |
| Стенд для испытания электроприводов стрелочных переводов | 2020 |
|
RU2750306C1 |
| Устройство системы потокового поэкземплярного контроля качества и сортировки единичных изделий в виде плоских многоугольников правильной формы | 2022 |
|
RU2784322C1 |
| СТЕНД ПРОВЕРКИ ЭЛЕКТРИЧЕСКОЙ ПРОЧНОСТИ ИЗОЛЯЦИИ ПУСКАТЕЛЕЙ И РЕЛЕ | 1994 |
|
RU2079919C1 |
| Автомат для контроля усилий пружин коммутационных аппаратов | 1978 |
|
SU741237A1 |
| АВТОМАТ ДЛЯ КОНТРОЛЯ И СОРТИРОВКИ ИЗДЕЛИЙ | 1970 |
|
SU264127A1 |
| Стенд для диагностических испытаний электроприводов стрелочных переводов | 2023 |
|
RU2810891C1 |
| Устройство для контроля и сортировки сердечников | 1980 |
|
SU895552A1 |