Известны автоматы для контроля ,и сортировки изделий, например пластин по гидродинамическому сопротивлению, -содержащие транспортер -с зажимами, нневмосистему, контрольные головки и механизм загрузки издел.ий.
Предлагаемый автомат для проверки пластин, используемых в изделиях защиты органов дыхания, например противогазов, -снабжен механизмами запоминания сигналов контрольной головки, вы-грузки изделий в -соответствующие данной группе кассеты и контроля герметичности установки изделия.
Механизм запоминания сигналов контрольной головки выполнен в виде зубчато-реечного диф-ферен-циального устройства, на водиле которого расположены пазы различной длины, каждый из которых соответствует определенной группе сортировки и взаимодействует с рычагом соответствующего магнита.
Механизм выгрузки изделий в соответствующие данной группе касеты выполнен в виде управляемых крышек, наклоненных в сторону движения транспортера.
Механизм контроля герметичности установки изделия выполнен в виде эластичного колпака, -соединенного с основной камерой зажима, и грузового рычага, воздействующего при падении давления в камере на путевой выключатель.
Такой автомат сортирует изделия на несколько групп в зависимости от величины гидродинамического сопротивления, показываемого каждой контрольной головкой.
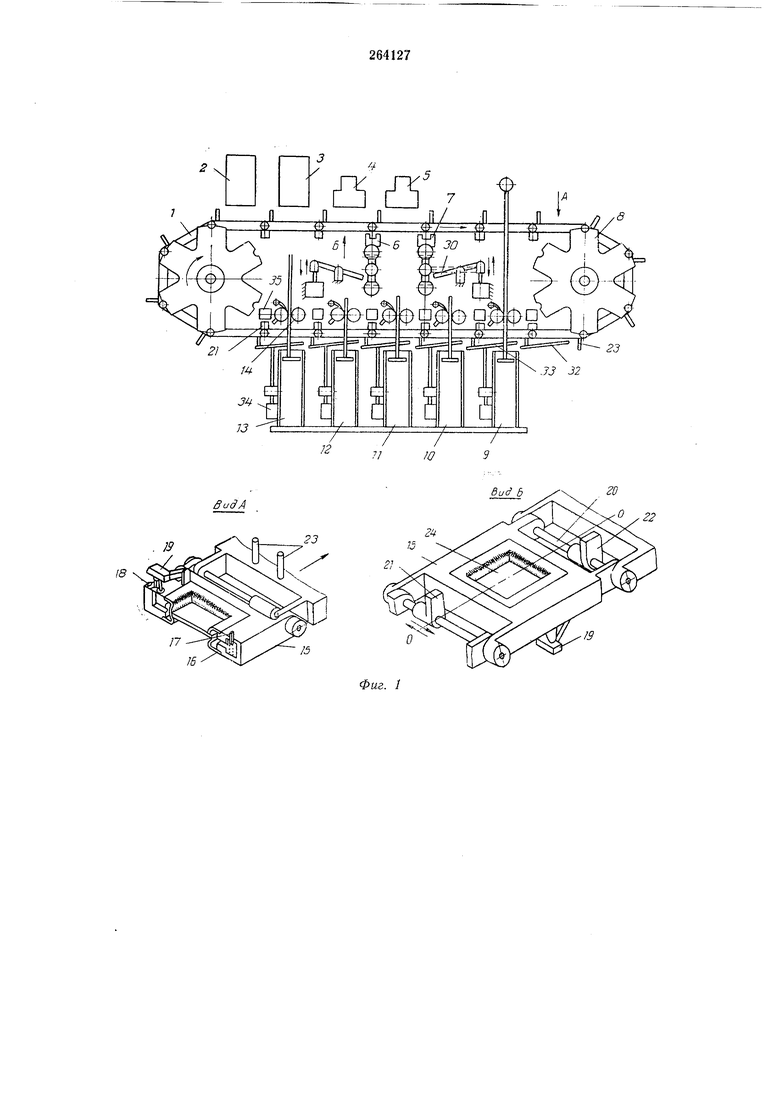
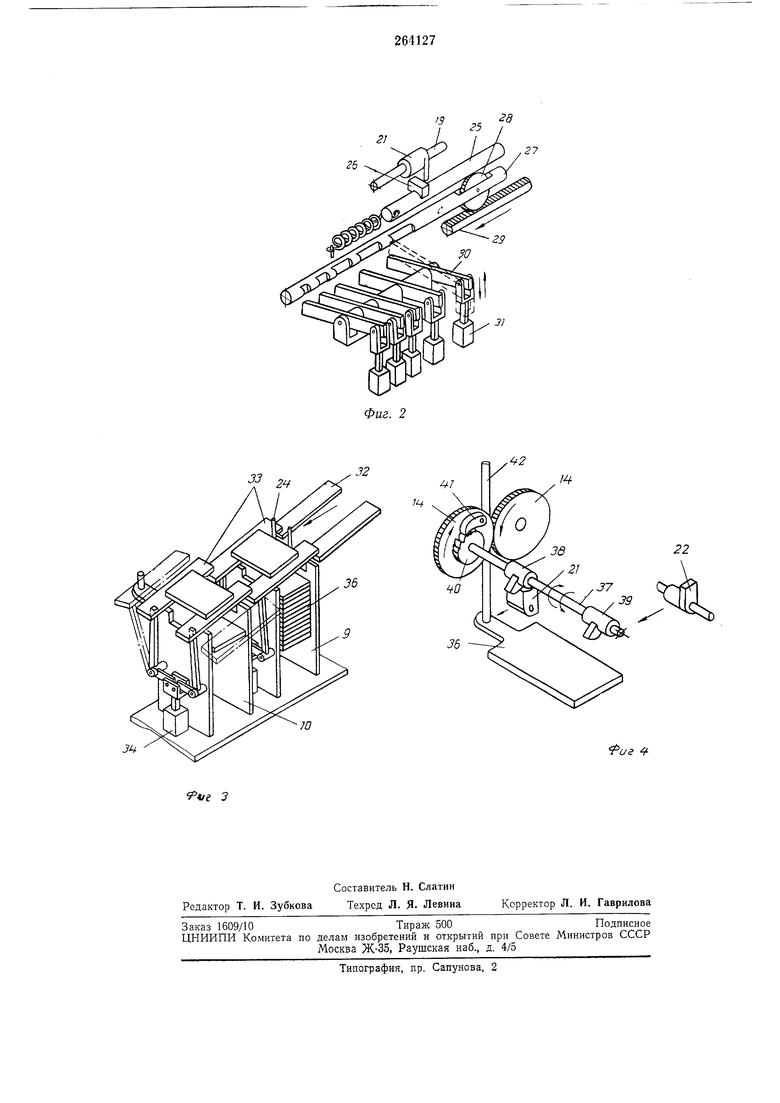
На фиг. 1 показан нредлагаемый автомат; на фиг. 2 - механизм запоминания; на фиг. 3 - механизм выгрузки изделия; на фиг. 4-механизм стапелировашгя изделия.
Автомат состоит из циклично врапхающегося цепного транспортера, звенья которого являются зажимами 1 изделия. Пад транспортером расноложены механизмы загрузки 2 и 3, а также контрольные головки 4 и 5. Под верхней ветвью транспортера находятся механизмы запоминания 6 Н 7 сигналов контрольных головок. Транспортер перемещается с помощью звездочек 8.
Под нижней ветвью транспортера расположены кассеты 9-13, количество которых соответствует числу групп сортировки. Над нижней ветвью транспортера имеются ролики М механизмов стапелирования. Зажим изделия состоит из плиты 15, резиновой пленки 16, герметично соединенной с плитой, кланана 17, эластичного колпака 18, также герметично соединенного с плитой, и грузового рычага 19. Плиты имеют проушины и соединены между собой осью 20. На носледней сделаны упоры 21 и 22, размещенные по разным сторонам от продольной оси О-О транспортера. Упоры могут перемещаться Вдоль оси 20, но зафиксированы от поворота. На плите имеются штыри 23. Изделие 24 зажимается и герметизируется резиновой пленкой.
Механизм запоминания 6 состоит из рейки 25 с закрепленными па пей упорами 26, водила 27, зубчатого колеса 28, рейки 29, рычагов 30 и магпитов 31. Аналогично устроен и механизм запоминания 7.
Механизм выгрузки изделий состоит из неподвижных крышек 32, расположенных перед кассетой .9 (первой по ходу транспортера), подвижных крышек 33, раскрывающихся с помощью магнитов 34. Последние управляются конечными бесконтактными выключателями 35.
Механизм стапелирования содержит подвижное дно 36, ось 37, на которой жестко закреплены флалски 38 и 39, храповик 40 и свободно пасажепиый ролик 14 с собачкой 41. Второй ролик 14 свободно вращается на собственной оси. Штанга 42 зажата между роликами. Ось 37 может поворачиваться прп воздействии упоров 21 и 22 на флажки, а после окончания воздействия возвращается в исходное положение при помощи пружины.
Зажимы, загружающиеся изделиями 24 из загрузочпого устройства И соответствепно останавливающиеся под контрольной головкой 4, называются четными, а зажимы, загружающиеся из загрузочного устройства 3 и соответственно останавливающиеся под контрольной головкой 5, называются «нечетными. Изделия, зажатые в «четных зажимах, считаются «четными и наоборот.
Транспортер за каждый цикл перемещается па две позиции, поэтому всегда «четные зажимы останавливаются против четных механизмов 2, 4, 6, 10, 12, а «нечетные - против «нечетных механизмов 3, 5, 7, 11, 13.
Автомат работает следующим образом.
Изделия подаются из механизмов загрузки в зажимы. После этого через клапан 77 подает- я воздух под эластичную пленку 16 и под элас гичпый колпак /5. Пленка раздуваясь, зажимает изделие герметично по периметру. Соедипенный с полостью пленки .колпак, раздуваясь, поднимает грузовой рычаг. Затем, с помощью мальтийского механизма, транспортер перемещается на две позиции и «четное изделие останавливается против контрольной головки 4, а «нечетное - против контрольной головки 5. Контрольные головки опускаются и замеряют сопротивление соответствующих изделий.
Командами прибора контрольной головки 4 управляется механизм запоминания 6, а от контрольного прибора головки 5 - механизм запоминания 7.
Механизм запоминания работает следующим образом.
От соответствующего контрольного прибора в зависимости от сопротивления изделия поступает команда на включение одного из магнитов 31. После включения магнита соединениый с ним рычаг 30 повернется и своим плечом войдет в соответствующий паз водила 27. Далее в соответствии с циклограммой автомата начинает двигаться рейка 29 (в направлении, указанном стрелкой). Рейка перемещается всегда на одну и ту же величину. Зубчатое колесо 28, проталкиваясь по рейкам 25 и 29, перемещает водило до тех пор, пока последнее не упрется краем паза в рычаг 30.
После этого останавливается, а зубчатое колесо 28, продолжая вращаться вокруг своей оси, перемещает рейку 25 до тех пор, пока не прекратится движение рейки 29. Упор 26 переместит упор 21 па определеппую величину.
Последний и аналогичный ему упор 22 являются носителями информации о выгрузке прокоитролироваппого изделия в соответствующую кассету. Так как упор 21 перемещается только от механизма запоминания 7,
а упор 22 от механизма 6, то для того, чтобы не накладывалась информация двух контрольных приборов, упоры перемещаются только иа своей половине транспорта (т. е. не пересекают ось О-О). Пазы водила выполнены
различной длины и поэтому величина перемещения уиоров зависит от включения того или иного магнита.
|По окончании процесса запоминания зажимы с изделиями перемещаются к месту выгрузки. По пути зажи.мов расположены путевые выключатели. Если в камере , образованной резиновой пленкой, не произошло -падения давления (т. е. изделие герметично), то грузовой рычаг 19 не опущен
и не может воздействовать на путевые выключатели. Если давление упало, то рычаг опустится, и, воздействуя на путевой выключатель, остановит автомат. При дальнейшем транспортера производится выгрузка изделий.
описаны все возможные варианты выгрузки, il. «Четное изделие в кассету 9.
«Четное изделие останавливается, не доходя на один шаг цепи транспортера до кассеты 9 (т. е. над крышками 32). Упор 22, который перемещен па определенную величину, остановится против соответствующего конечного
бесконтактного выключателя 35. От последнего приводится в движение механизм отсоса воздуха, который через клапан 17 отсасывает воздух из-под резиновой пленки. Изделие освобождается и выпадает на крышки, имеюЩие наклон в сторону движения транспорта. При следующем перемещении транспортера штыри 23 перемещают изделия по крышкам 32 и заталкивают его под крыщки 33, где оно проваливается в кассету 9 на подвижное дно
36. Упор 22 воздействует на 39, а через ось 37 на храповик 40, который поворачивается на один зуб и, воздействуя на собачку 41, поворачивает ролики 14. Штанга 42, вместе с ней и подвижное дно 36, опускается на
2.«Нечетное изделие в кассету 9. «Нечетное остановится над кассетой. Упор
21, перемещенный на соответствующую величину, остаиовится под конечным выключателем 35, который дает команду на включение магнита 34 и на отсос воздуха из зажима. Крыщки 33 раскрываются и .изделие выпадает в кассету на подвижное дно. Упор, воздействуя на флажок 38, опустит дно 36 на велнчину, равную толщине изделия.
3.«Четное и «нечетное изделие в кассету 9.
Ё этом случае «четное изделие выгрузится на крыщки 32 (см. П. 1), а «нечетное изделие в кассету 9 (см. п. 2). Опускание дна 36 нроизойдет дважды под воздействием упоров на флажки 38 и 39.
4.«Нечетное изделие в кассету W. Изделие остановится над кассетой 5. Упор
2}, смещенный на соответствующую величину, воздействует на выключатель 35. Тот, в свою очередь, дает команду только на выгрузку изделий. Крьгшки 33 не раскрыты. Изделие выпадает на крышки и штырями -при дальнейшем движении транспортера заталкивается в кассету W. Опускание дна 36 производится на один зуб храповика описанным выше способом. Выгрузка «четного изделия в кассету 10 аналогична выгрузке «нечетного изделия в кассету -9. А выгрузка и «четного и «нечетного изделий в кассету W аналогична выгрузке таких же изделий в кассету 9. Выгрузка в остальные кассеты производится так же. После прохода зажимами мест выгрузки упоры возвращаются в исходное положение.
Предмет изобретения
1.Автомат для контроля и сортировки изделий, например пластин по гидродинамическому сопротивлению, содержащий привод, контрольные головки, механизм загрузки изделий, транспортер с зал имами и пневмосистему, отличающийся тем, что, с целью осуществления сортировки изделий на несколько групп в зависимости от величины гидродинамического
сопротивления, показываемого каждой контрольной головкой, он снабжен механизмом запоминания сигналов контрольной головки, механизмом выгрузки изделий в соответствующие данной группе кассеты и механизмом
герметичности установки изделия.
2.Автомат по п. 1, отличающийся тем, что механизм запоминания сигналов контрольной головки выполнен в виде зубчато-реечного дифференциального устройства, на водиле которого расположены пазы различной длины, каждый из которых соответствует определенной группе сортировки и взаимодействует с рычагом соответствующего магнита.
3. Автомат по п. 1, отличающийся тем, что механизм выгрузки изделий в соответствующие данной группе кассеты выполнен в виде управляемых крышек, наклоненных в сторону движения транснортера.
4. Автомат но п. 1, отличающийся тем, что механизм контроля герметичности установки изделия выполнен в виде эластичного колпака, соединенного с основной камерой зажима, и грузового рычага, воздействующего при паденин давления в камере на путевой выключатель.
eui3A
19
17
5
16
Bud 5
22
4
Фиг. 1
3
Фиг. 2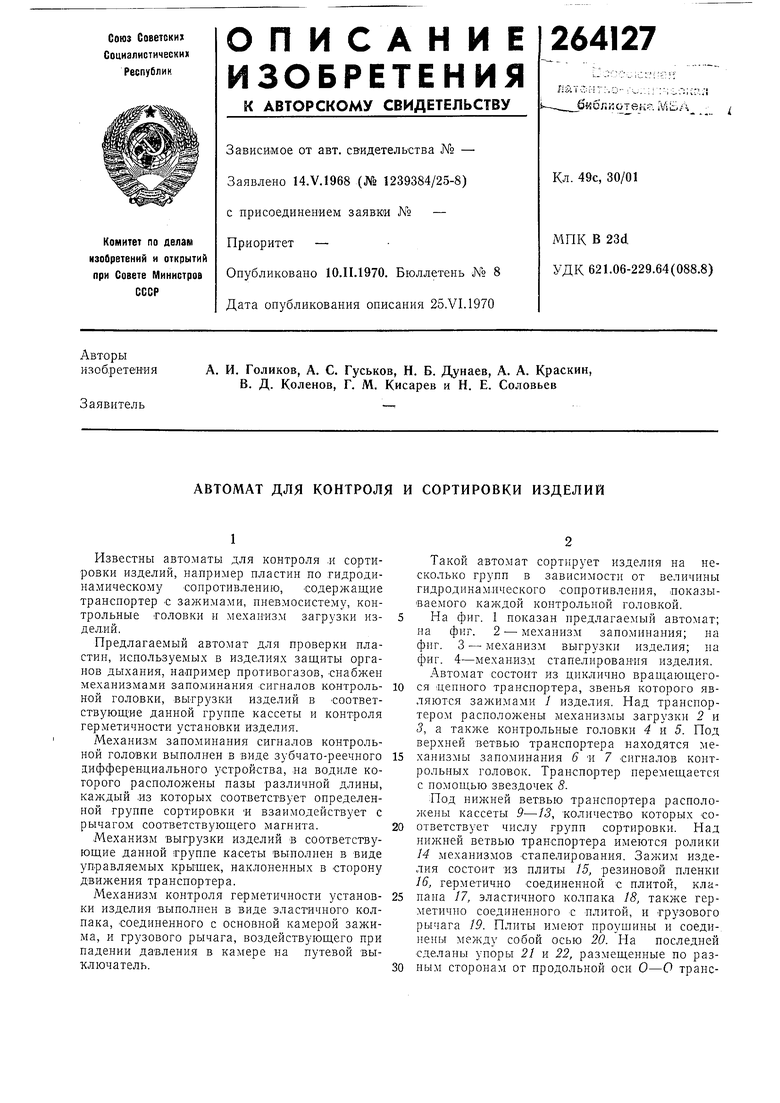
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для контроля линейных параметров дисков фрикционов | 1975 |
|
SU766670A1 |
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ УКЛАДКИ СПИРАЛЕЙ НИТЕЙ НАКАЛА НА БАРАБАН МОНТАЖНОГО АВТОМАТА | 1966 |
|
SU187152A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ СБОРКИ РОЛИКОВ | 1973 |
|
SU382494A1 |
| Устройство для набора плоских деталей в стопку | 1980 |
|
SU905141A1 |
| ЛИНИЯ ОБРАБОТКИ ЯИЦ | 1992 |
|
RU2048088C1 |
| Гибкий производственный модуль для листовой штамповки | 1988 |
|
SU1667994A1 |
| РАДИАЦИОННАЯ СТЕРЕОТЕЛЕВИЗИОННАЯ УСТАНОВКА | 1969 |
|
SU251236A1 |
| УСТРОЙСТВО РОТОРНОГО ТИПА для ВУЛКАНИЗАЦИИ РЕЗИНОВЫХ И АСБЕСТО-РЕЗИНОВЫХ ИЗДЕЛИЙ | 1965 |
|
SU173918A1 |
| ЕСЕСОЮвНАЯm^iim-iim-^m | 1973 |
|
SU379467A1 |
| МЕХАНИЗИРОВАННАЯ ЛИНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ РАМОЧНЫХ СЕТОК | 1969 |
|
SU234531A1 |
ЗL
3
14
/22
ЗЬ
fus 4
