1
Изобретение относится к электротехнике и может быть использовано для управления скоростью транспортных рольгангов, вращаемых электродвигателями переменного тока, подключенными в параллель к выходу вентильного преобразователя частоты, в частности тиристорного преобразователя частоты с непосредственной связью или инвертора тока. ,
Известна система управления для многодвигательного привода переменного тока, в которой блок задания выходных напряжений подсоединен к первым входам первого, второго и третьего блоков суммирования, к вторым входам которых подсоединены выходы датчиков фазных напряжений двигателей, а к выходам - входы фазных регуляторов напряжения, подсоединенных выходами к первым входам четвертого, пятого и шестого блоков суммирования, подсоединенных выходами к трем входам системы управления преобразователем частоты, к выходам которого подсоединены двигатели, выходы датчиков фазных токов двигателей подсоединены к входам блока коррекции, соответствующие по фазе выходы которого подсоединены к третьим входам первого, второго и третьего блоков суммирования и к вторым входам четвертого, пятого и шестого блоков деления Г1 1.
to
Однако а этой системе отсутствуют подчиненные регуляторы тока. Их отсутствие связано с тем, чп-о регуляторы напряжения в этой системе имеют высокое быстродействие. Регулято15ры, подчиненные регуляторам напряжения, должны были бы иметь частоту среза, недопустимую для системы, выполненной на базе тиристорного преобразователя частоты. Система без ре20гуляторов тока имеет пониженную надежность работы, так как в ней небольшие колебания напряжения нагрузки вызывают значительные броски тока нагрузки. Кроме того, эта система достаточно сложна и громоздка при том, что она предназначена.для реали зации в электроприводах, в которых не требуются высокие быстродействие и точность. Наиболее близкая к предлагаемой система управления для многодвигательного привода переменного тока содержит блок задания частоты, соединенный с первым входом системы управления преобразователем частоты к вь1ходу которого подсоединена группа двигателей, функциональный преобразователь, вход которого соединен с выходом блока задания частоты, а выход - с первым входом первого блока суммирования, второй вход которого соединен с выходом датчика напряжения двигателей, а выход - с входом регулятора напряжения, соединенного выходом с первым входом второго сумматора , второй вход которого соединен с выходом датчика тока двигателей, а выход - с входом регулятора тока, соединенного выходом с вторым входом системы управления преобразователем частоты 23. Недостатком известной системы яв ляется существенное понижение ее устойчивости и быстродействия при изме нении частоты выходного напряжения преобразователя в случаях, когда под ключенные к выходу преобразователя частоты двигатели являются звеном контура регулирования напряжения. Эт
ВОЗМОЖНО при реализации системы на -базе преобразователя частоты с непосредственной связью или инвертора тока.
Цель изобретения - повышение устойчивости и быстродействия системы.
Поставленная цель достигается тем, что в одноканальную систему управления для многодвигательного привода переменного тока, содержащую блок задания частоты, соединенный с входом системы управления преобразователем частоты, выходы которого предназначены для подключения к группе двигателей, функциональный преобразователь, вход которого подключен к блоку задания-частоты, а, выход - к первому блоку суммирования, второй вход которого соединен с выходом датчика напряжения двигателей, последовательно соединенные регулятор напряжения, второй блок
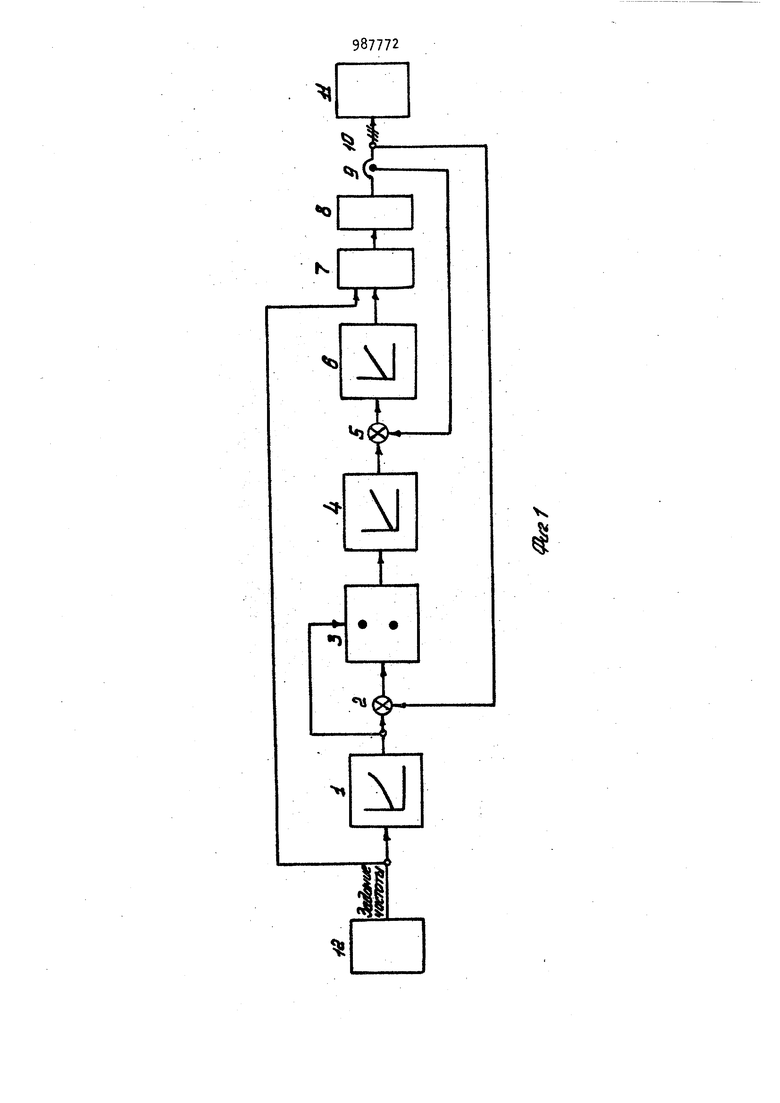
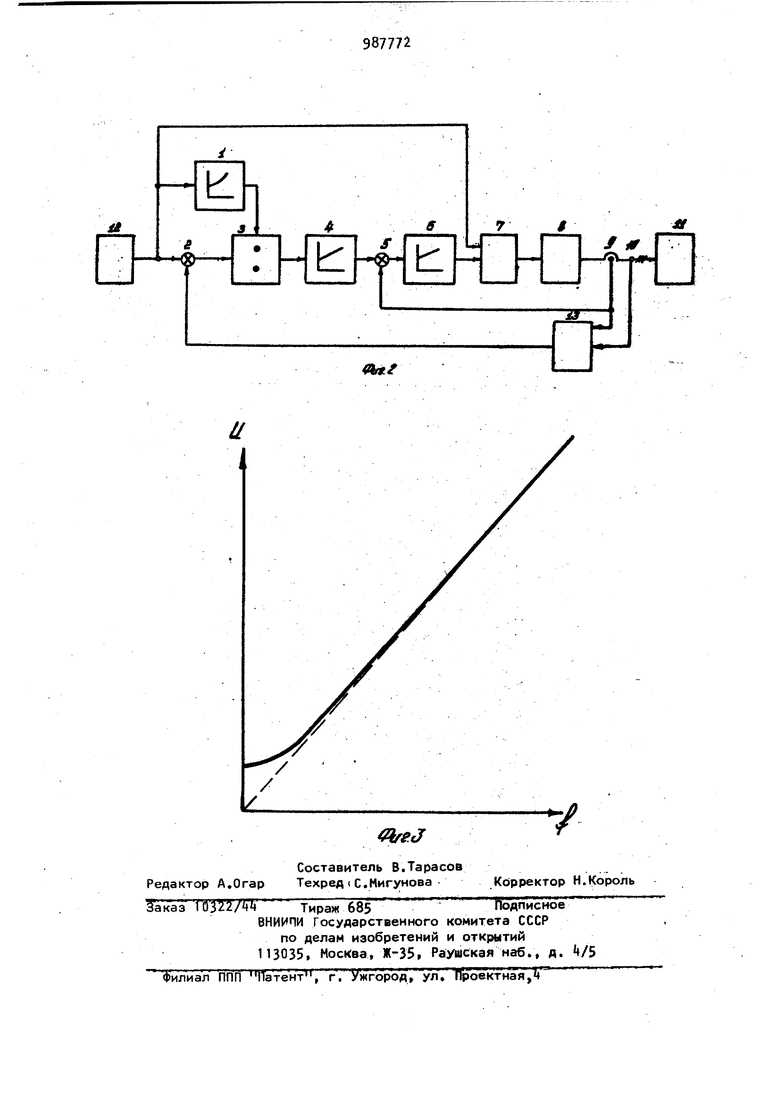
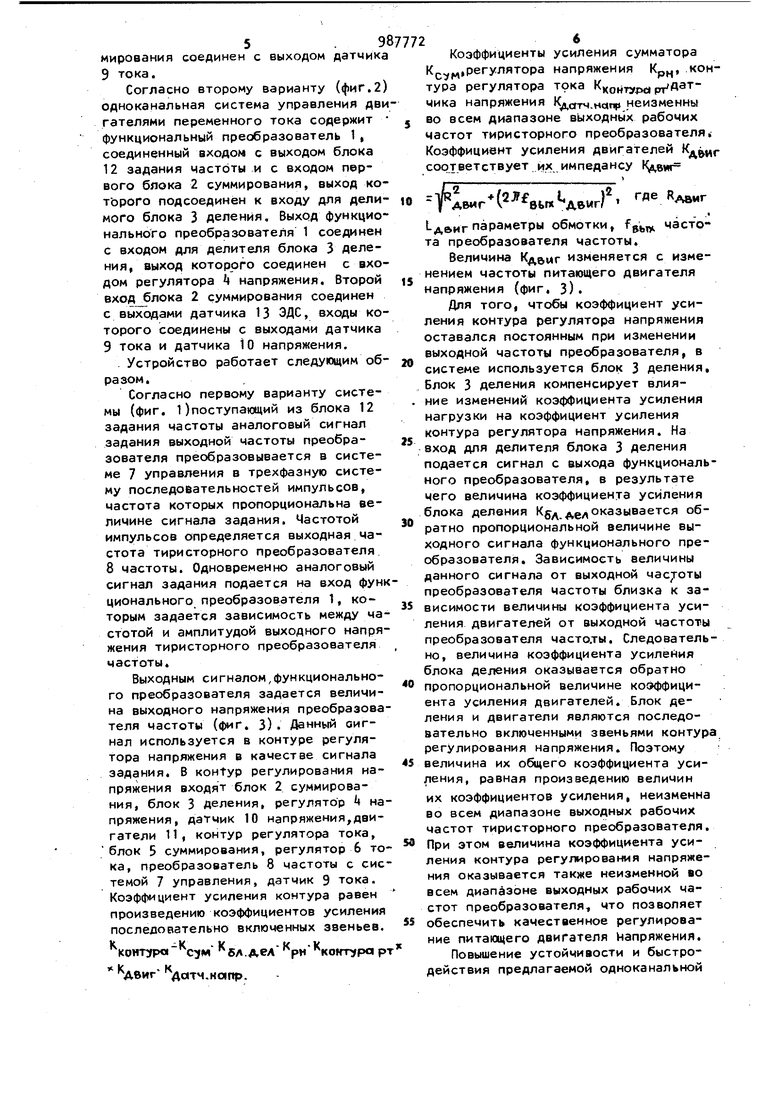
Согласно первому варианту (фиг.1) одноканальная система управления содержит функциональный преобразователь 1, соединенный выходом с вхбдом первого блока 2 суммирования и с входом для делителя блока 3 деления, соединенного выходом с регулятором Ц напряжения, выход которого через второй блок 5 суммирования соединен с входом регулятора 6 тока Выход регулятора 6 со.единен с входом системы 7 управления преобразователем 8 частоты, к выходу которого через датчики 9 тока и датчик 10 напряжения подсоединены двигатели 11. Входы функционального преобразователя 1 и системы 7 управления преобразователем 8 йастоты подсоединены к выходу блока 12 задания ча- стоты. Второй вход блока 2 суммирования соединен с входом для делимого блока 3. Второй вход блока 5 сумсуммирования и регулятор тока, при этом выход последнего соединен с входом системы управления преобразователем частоты, а второй вход второго сумматора соединен с выходом датчика тока двигателей, введен блок деления, выход которого подооединен к входу регулятора напряжения, вход для делителя блока деления подсоединен к выходу функционального преобразователя, а вход для делимого блока деления подсоединен к выходу первого блока суммирования. Поставленная цель достигается также тем, что в одноканальную систему управления для многодвигательного привода переменного тока введены датчик ЭДС и блок деления, выход которого подсоединен к входу регулятора напряжения, вход для делителя блока деления подсоединен к выходу функционального преобразователя, вход для делимого блока деления подсоединен к выходу первого блока суммирования, второй вход которого соединен с выходом датчика ЭДС, входы которого соединены с выходами датчиков тока и напряжения двигателей. На фиг. 1 приведена блок-схема одноканальной системы управления для многодвигательного привода переменного тока, первый вариант; на фиг. 2 - то же, второй вариант; на фиг, 3 - зависимость выходного сигнала функционального преобразователя от входного сигнала. 5 . 9 мирования соединен с выходом датчик 9 тока. Согласно второму варианту (фиг.2 одноканальная система управления дв гателями переменного тока содержит функциональный преобразователь 1, соединенный входом с выходом блока 12 задания частоты и с входом первого блока 2 суммирования, выход ко торого подсоединен к входу для дели мого блока 3 деления. Выход функцио нального преобразователя 1 соединен с входом для делителя блока 3 деления, выход которого соединен с вхо дом регулятора напряжения. Второй вход блока 2 суммирования соединен с выходами датчика 13 ЭДС, входы ко торого соединены с выходами датчика 9 тока и датчика 10 напряжения. . Устройство работает следующим об разом. Согласно первому варианту системы (фиг. 1)поступающий из блока 12 задания частоты аналоговый сигнал задания выходной частоты преобразователя преобразовывается в системе 7 управления в трехфазную систему последовательностей импульсов, частота которых пропорциональна величине сигнала задания. Частотой импульсов определяется выходная частота тиристорного преобразователя 8 частоты. Одновременно аналоговый сигнал задания подается на вход фун ционального преобразователя 1, которым задается зависимость между ча стотой и амплитудой выходного напря жения тиристорного преобразователя частоты. Выходным сигналом,функционального преобразователя задается величина выходного напряжения преобразова теля частоты ((. 3) . Данный сигнал используется в контуре регулятора напряжения в качестве сигнала задания. В конТур регулирования напряжения входят блок 2 суммирования, блок 3 деления, регулятор на пряжения, датчик 10 напряжения,двигатели 11, контур регулятора тока, блок 5 суммирования, регулятор 6 то ка, преобразователь 8 частоты с сис темой 7 управления, датчик 9 тока. Коэффициент усиления контура равен произведению коэффициентов усиления последовательно включенных звеньев. контора с м .Аел рн р VeHr- .напр. 2 Коэффициенты усиления сумматора Kj,,регулятора напряжения Кр, контура регулятора тока К онтурв рт Д чика напряжения Кдатм.напр неизменны во всем диапазоне выходнЬ1х рабочих частот тиристорного преобразователя Коэффициент усиления двигателей К.ц соответствует их импедансу Ндв«г --Г1вигЧ2 в1 гх дви/ двиг параметры обмотки, v. частота преобразователя частоты. Величина изменяется с изменением частоты питающего двигателя напряжения (фиг, 3). Для того, чтобы коэффициент усиления контура регулятора напряжения оставался постоянным при изменении выходной частоты преобразователя, в системе используется блок 3 деления. Блок 3 деления компенсирует влияние изменений коэффициента усиления нагрузки на коэффициент усиления контура регулятора напряжения. На вход для делителя блока 3 деления подается сигнал с выхода функционального преобразователя, в результате чего величина коэффициента усиления блока деления ., оказывается обратно пропорциональной величине выходного сигнала функционального преобразователя. Зависимость величины данного сигнала от выходной частоты преобразователя частоты близка к зависимости величины коэффициента усиления двигателей от выходной частоты преобразователя частоты. Следовательно, величина коэффициента усиления блока деления оказывается обратно пропорциональной величине коэффициента Усиления двигателей. Блок деления и двигатели являются последовательно включенными звеньями контура регулирования напряжения. Поэтому величина их общего коэффициента усиления, равная произведению величин их коэффициентов усиления, неизменна во всем диапазоне выходных рабочих частот тиристорного преобразователя. При этом величина коэффициента усиления контура регулирования напряжения оказывается также неизменной во всем диапазоне выходных рабочих частот преобразователя что позволяет обеспечить качественное регулирование питающего двигателя Напряжения. Повышение устойчивости и быстродействия предлагаемой одноканальной 9 системы управления двигателями переменного тока достигается путем вве дения в контур регулирования напряжения .блока деления, с помощью которого обеспечивается стабилизация коэффициента усиления контура регули рования напряжения во всем диапазоне частот питающего двигатели напряжения. При. низких частотах питающего дви гатели напряжения известные датчики напряжения не обеспечивают высокой точности контроля выходного напряжения преобразователя частоты, а спе циальные датчики достаточно громоздки и сложны. Поэтому для обеспечения качественного регулирования напр жения двигателей на низких частотах целесообразно использовать второй ва риант одноканальной системы управления двигателями переменного тюка (фиг, 2) .В этом варианте системы сигналом обратной связи по напряжению служит выходной сигнал датчика ЭДС, а сигнал задания величины напряжения пост пает непосредственно с блока 12 зада ния. Функциональный преобразователь 1 в этом варианте системы настраивают так, чтобы блок деления 3 в точности компенсировал влияние двигателей 11 на коэффициент усиления контура регулирования напряжения. Повышение устойчивости и быстродействия в этом варианте одноканальной системы управления двигателями переменного тока достигается путем введения в контур регулирования напряжения блока деления, с помощью которого обеспечивается стабилизация коэффициента усиления контура регулирования напряжения во всем диапазоне частот питающего двигатели напряжения, а также благодаря испол зованию датчика ЭДС, с помощью-кото рого обеспечивается качественная обратная связь по напряжению на низких частотах. Формула изобретения 1, ОдноканалЬная система управления для многодвигательного привода переменного тока, содержащая блок задания частоты, соединенный с гкодом системы управления преобразивателем частоты, выходы которого пред назначены для подключения к группе 28 двигателей, функциональный преобразователь, вход которого подключен к блоку задания частоты, а выход - к первому блоку суммирования, второй вход которого соединен с выходом датчика напряжения двигателей, последовательно соединенные регулятор напряжения, второй блок сумми|гования и регулятор тока,при этом выход последнего соединен с входом системы управления преобразователем частоты, а второй вход второго блока суммирования соединен с выходом датчика тока двигателей, отличающаяся тем, что, с целью повышения устойчивости и быстродействия, в нее введен блок деления, выход которого подсоединен к входу регулятора напряжения, вход для делителя блока деления подсоединен к выходу функционального преобразователя, а вход для делимого блока деления подсоединен к выходу первого блока суммирования. 2, Одноканальная система управления для Многодвигательного при-вода переменного тока, содержащая блок задания частоты, соединенный с входом системы управления преобразователем частоты, выходы которого предназначены для подключения к группе двигателей, функционал)Ный преобразователь , вход которого подключен к блоку задания частоты, а выходк первому блоку Суммирования, последовательно соединенные регулятор напряжения, второй блок суммирования и регулятор тока,при этом выход последнего соединен с входом системы управления преобразователем частоты, а второй вход второго блока суммирования соединен с выходом датчика тока двигателей датчик напряжения питания двигателей, отличающаяся тем, что, с целью повышения устойчивости и быстродействия, в нее введены датчик ЭДС и блок деления, выход которого подсоединен к входу регулятора напряжения, вход для делителя блока деления подсоединен к выходу функциойального преобразователя, вход для делимого блока деления подсоединен к выходу первого блока суммирования, второй вход которого соединен с выходом датчика ЭДС, входы которого соединены с выходами датчиков тока и напряжения двигателей.
998777210
Источники информации,2, Кривицкий С.О/, Эпштейи И,И.
принятые во внимание при экспертизе Динамика частотно-регулируемых элек
1. Авторское свидетельство СССР тропроводов с автономными инвентоN663063 нл. Н 07 13/16, 1976. рами. М., Энергия, 1970., с. 113.
L
Д
iti

| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| Устройство для управления многодвигательным электроприводом переменного тока | 1987 |
|
SU1422358A1 |
| Устройство для управления асинхроннымэлЕКТРОдВигАТЕлЕМ | 1979 |
|
SU838997A1 |
| Частотно-регулируемый электропривод | 1979 |
|
SU826543A1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2074503C1 |
| Многодвигательный электропривод | 1991 |
|
SU1774457A1 |
| ЭЛЕКТРОПРИВОД С АДАПТИВНЫМ РЕГУЛИРОВАНИЕМ ТОКА | 1993 |
|
RU2095930C1 |
| Устройство для управления электроприводомпЕРЕМЕННОгО TOKA | 1979 |
|
SU851718A1 |
| УСТРОЙСТВО ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2010 |
|
RU2412526C1 |
| Электропривод постоянного тока | 1976 |
|
SU657554A1 |