Известны высокоточные стереоколшараторы, предназначенные для измерений прямоугольных координат точек аэроснимков при стереоскопическом наведении, содержащие неподвижную бинокулярную оптическую систему, два измерителя координат, каждый из которых состоит из кареток «х и «у, и автоматические отсчетные устройства, выполненные на основе измерительных пар из дифракционных решеток.
Описываемый стереокомпаратор позволяет повысить точность измерений, что достигается изменениями отсчетного устройства, обеспечивающего независимость сигналов от разворота дифракционных решеток, и уменьшением изгиба точных направляюш,их под действием веса подвижных частей путем использования компенсатора нагрузки.
Кроме того, для уменьшения габаритов в нем применен автоматизированный привод движения кареток с одной подвижной шайбой и двумя дорожками для стальных лент. С целью повышения точности монокулярного наведения на изображения крестов снимков применены визирные марки микроскопа в виде двух угловых биссекторов.
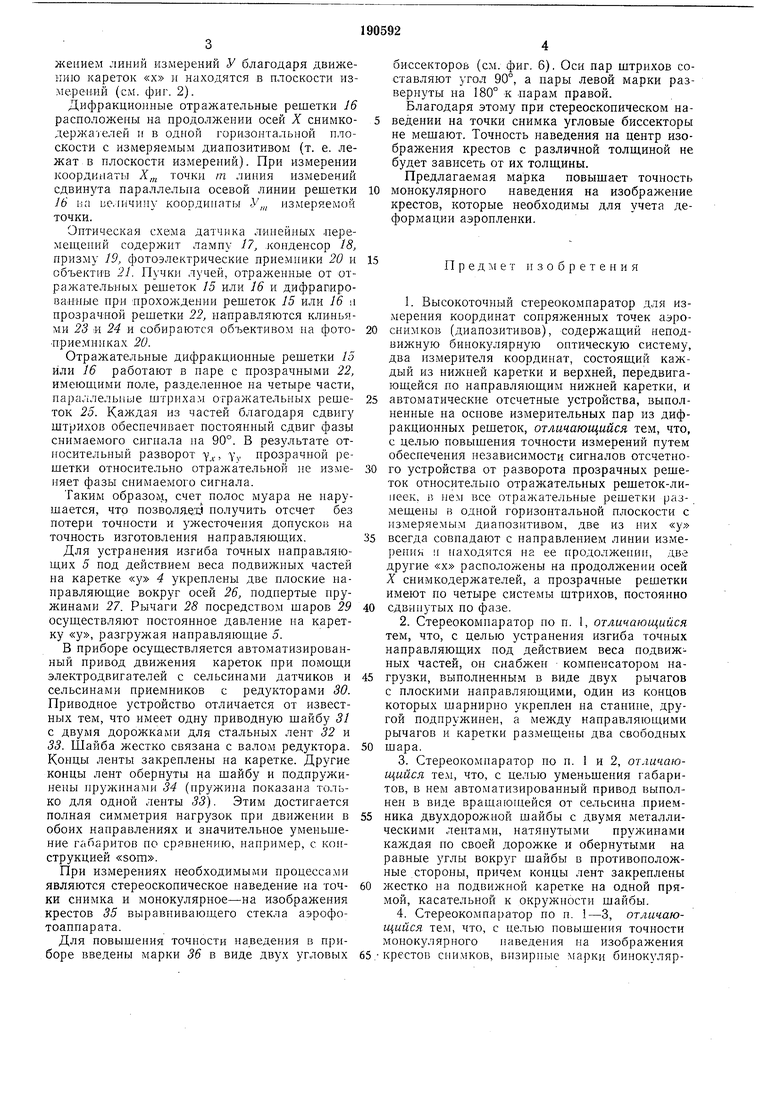
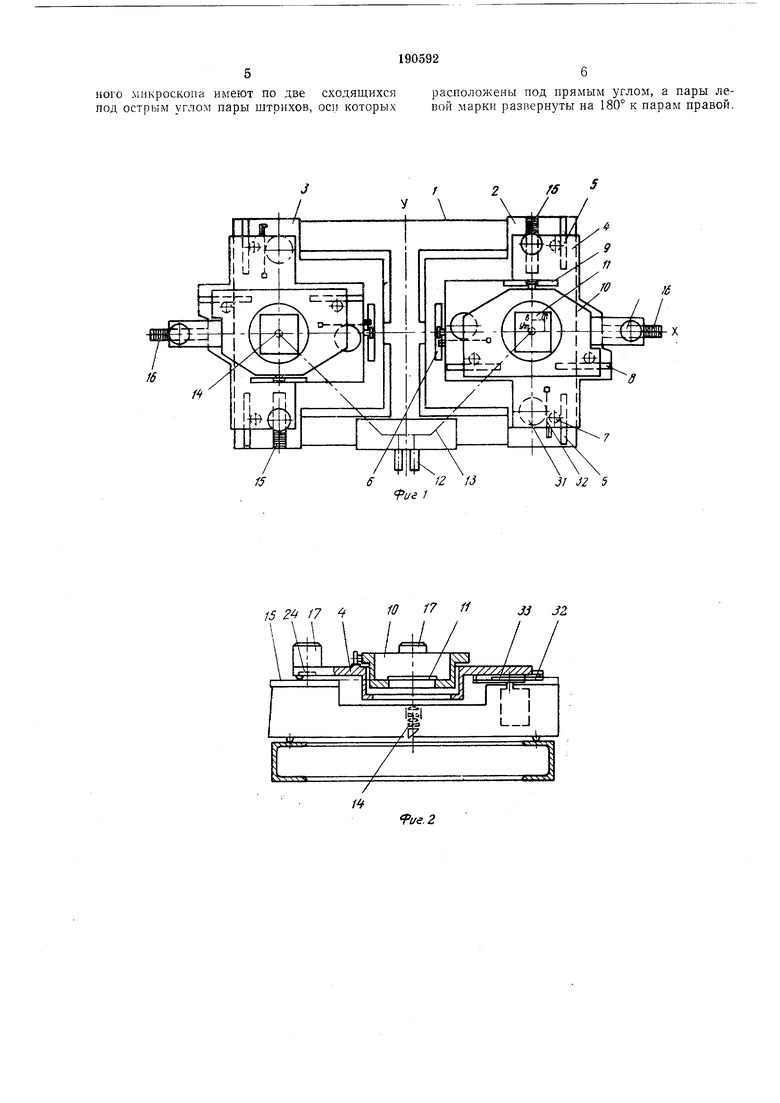
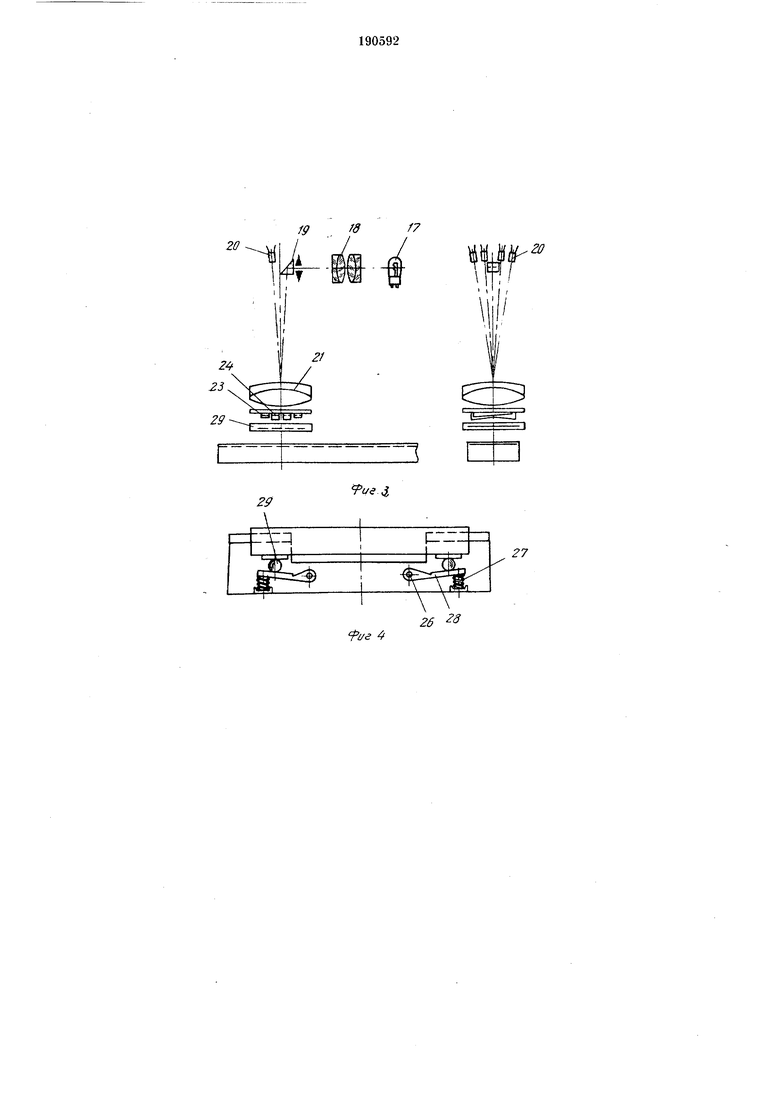
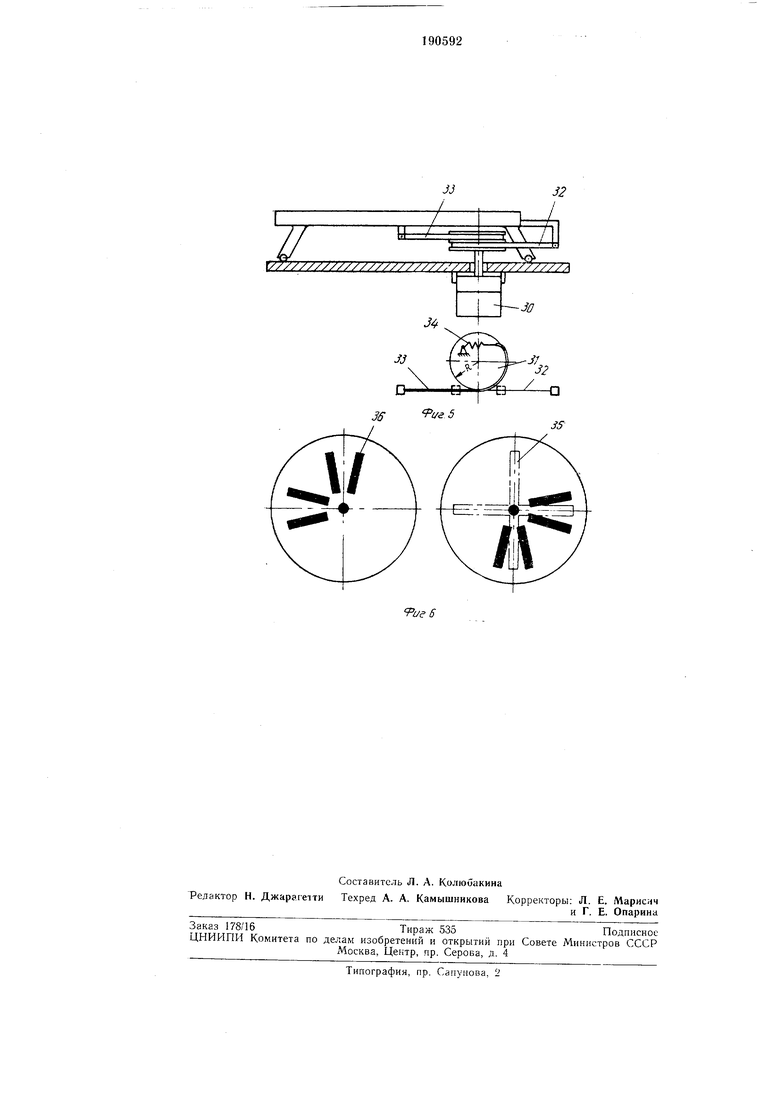
На фиг. 1 приведена принципиальная схема стереокомпаратора в плане, на фиг. 2 - разрез по оси У правого измерителя координат; на фиг. 3 - оптическая схема отсчетного устройства- датчика линейных перемещений; на фиг. 4 - устройство разгрузки точных направляющих; на фиг. 5 - автоматизированный привод движения кареток; на фиг. 6 - визирная марка.
На раме 1 на подъемных виптах устаноилены станины 2 и 5 правого и левого измерителей координат. Каретки «у 4 измерителей координат передвигаются по направляющим 5
и 6 станины на трех шарикоподшипниках с горизонтальными осями (на чертеже не показаны). Направление перемещения задается в горизонтальной плоскости вертикальными гранями направляющих 5, по которым катятся
подшипники 7 с. вертикальными осями. С противоположных им сторон направляющих 5 расположены подвижные подшипники на подпружиненных рычагах (на чертеже не показаны).
Аналогичная система подшипников и направляющих 8 9 применена для кареток «х 10, на которых ставятся съемные снимкодержатели со сним.ками (диапозитивами) II. Снимки рассматривают через бинокулярные
микроскопы 12 с горизонтальными ветвями оптической системы /5 и вертикально расположенными в станинах 2 и объективами 14. Дифракционные отражательные решетки 15 датчиков «у линейных перемещений (отсчетжением линий измерений У благодаря движению кареток «х и находятся в плоскости измерений (ciM. фиг. 2).
Дифракционные отражательные решетки 16 расположены на продолжении осей X снимкодержателей и в одной горизонтальной плоскости с измеряемым диапозитивом (т. е. лежат в плоскости измерений). При измерении координаты Х,, точки m линия измерений сдвинута параллельна осевой линии решетки 16 1)п ие,1ичиг1у координаты -У,,, измеряемой точки.
Оптическая схема датчика линейных перемещений содерл :ит иТампу 17, .конденсор 18, призму 19, фотоэлектрические приемники 20 и объектив 21. Пучки лучей, отраженные от отражательных решеток 15 или 16 и дифрагированные при прохождении решеток 15 или 16 л прозрачной решетки 22, направляются клиньями 23 :И 24 и собираются обт ективом па фотонриемниках 20.
Отражательные дифракционные решетки 15 или 16 работают в наре с прозрачными 22, имеющими поле, разделенное па четыре части, параллельные штрихам отражательных решеток 25. Каждая из частей благодаря сдвигу штрихов обеспечивает постоянный сдвиг фазы снимаемого сигнала на 90°. В результате относительный разворот Уд- Yy прозрачной решетки относительно отражательной не изменяет фазы снимаемого сигнала.
Таким образом, счет полос муара не нарушается, что позволяех получить отсчет без потери точности и ужесточения допусков на точность изготовления направляющих.
Для устрапения изгиба точных направляющих 5 под действием веса подвижпых частей на каретке «у 4 укреплены две плоские направляющие вокруг осей 26, подпертые пружинами 27. Рычаги 28 посредством шаров 29 осуществляют постоянное давление иа каретку «у, разгружая направляющие 5.
В приборе осуществляется автоматизированный привод движения кареток при помощи электродвигателей с сельсинами датчиков и сельсинами приемников с редукторами 30. Приводное устройство отличается от известных тем, что имеет одну приводную шайбу 31 с двумя дорожками для стальных лент 32 и 33. 111айба жестко связана с валом редуктора. Концы ленты закреплены на каретке. Другие концы лент обернуты на шайбу и подпружинены пружинами 34 (пружина показана только для одной ленты 33}. Этим достигается полная симметрия нагрузок при движении в обоих нанравлениях и значительное уменьшение габаритов но сравнению, нанример, с конструкцией «som.
При измерениях необходимыми процессами являются стереоскопическое наведение на точки снимка и монокулярное-на изображения крестов 35 выравнивающего стекла аэрофотоаппарата.
Для повышения точности наведения в приборе введены марки 36 в виде двух угловых
биссекторов (см. фиг. 6). Оси пар штрихов составляют угол 90°, а пары левой марки развернуты на 180° к парам правой.
Благодаря этому при стереоскопическом наведении на точки снимка угловые биссекторы не мешают. Точность наведения на центр изображения крестов с различной толщиной не будет зависеть от их толщины.
Предлагаемая марка повышает точность монокулярного наведения на изображение крестов, которые необходимы для учета деформации аэропленки.
Предмет изобретения
1. Высокоточный стереокомпаратор для измерения координат сопряженных точек аэроснимков (диапозитивов), содержащий неподвижную бинокулярную оптическую систему, два измерителя координат, состоящий каждый из нижней каретки и верхней, передвигающейся по направляющим нижней каретки, и
автоматические отсчетные устройства, выполненные на основе измерительных пар из дифракционных решеток, отличающийся тем, что, с целью повышения точности измерений путем обеспечения независимости сигналов отсчетного устройства от разворота прозрачных решеток относительно отражательных решеток-линеек, в нем все отражательные решетки размещены в одной горизонтальной плоскости с измеряемым диапозитивом, две из них «у
всегда совпадают с паправлением линии измерения II находятся на ее продолжении, две другие «X расположены на продолжении осей X снимкодержателей, а прозрачные решетки имеют по четыре системы штрихов, постоянно
сдвинутых по фазе.
2.Стереокомпаратор но п. 1, отличающийся тем, что, с целью устранения изгиба точных направляющих под действием веса подвижных частей, он снабжен компенсатором нагрузки, выполненным в виде двух рычагов с плоскими направляющими, один из концов которых шарнирно укреплен на станине, другой подпружинен, а между направляющими рычагов и каретки размещепы два свободных
шара.
3.Стереокомнаратор по п. 1 и 2, отличающийся тем, что, с целью уменьшения габаритов, в нем автоматизированный привод выполнен в внде вращаюидейся от сельсина приемника двухдорожной шайбы с двумя металлическими лентами, натянутыми пружинами каждая но своей дорожке и обернутыми на равные углы вокруг шайбы в противоположные стороны, причем концы лент закреплены
жестко на подвижной каретке на одной прямой, касательной к окружности шайбы.
4.Стереокомпаратор по п. 1-3, отличающийся тем, что, с целью повышения точности монокулярного наведения на изображения Horo микроскопа имеют по две сходящихся под острым утлом пары штрихов, оси которых расположены под ирямым углом, а пары левой марки развернуты на 180° к парам правой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Стереокомпаратор | 1979 |
|
SU815500A1 |
| Устройство для определения гранулометрического состава породы | 1973 |
|
SU481767A1 |
| СТЕРЕОКОМПАРАТОР | 1967 |
|
SU194333A1 |
| ОРТОТРАНСФОРМАТОР | 1970 |
|
SU284324A1 |
| Стереофотограмметрический прибор | 1981 |
|
SU991168A1 |
| СТЕРЕОКОМПАРАТОР | 1971 |
|
SU302602A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФОРМЫ ПОВЕРХНОСТИ ТЕЛА ЧЕЛОВЕКА | 1972 |
|
SU435807A1 |
| Стереокомпаратор | 1974 |
|
SU514192A1 |
| СТЕРЕОАВТОГРАФ | 1971 |
|
SU309241A1 |
| СТЕРЕОКОМПАРАТОРii44S»Rf-'iG'^i t^KA | 1971 |
|
SU322616A1 |
/5 2 /7 4 Л J2
10 /7 //
JJ J2 5
us
fi/e
