Известны реостатные датчики для передачи на расстояние показа ни ii ра;иичных измерительных приборов, в частности, применительно к устро1 ствам для автоматического регулирования различных процессов.
Отклонение движка датчика задается подвижной системой прибора, изменякмпего контролируемую или регулируемую величину. Для устранения нагрузки, создаваемой движком датчика на подвижную систему измерительного прибора, последний обычно используется лишь для управления вспомогательным механизмом приводимым в действие от отдельного источника энергии, например, электродвигателя, который периодически перемещает контактный движок датчика, устанавливая его в соответствии с положением указателя измерительного прибора.
Особенность предложенного реостатиого датчика заключается в форме выполнения промежуточного механизма, действующего по типу „следящей системы и преобразующего отклонения подвижной системы измерительного прибор, и пропорциональные им перемещения контактного движка реостатного датчика.
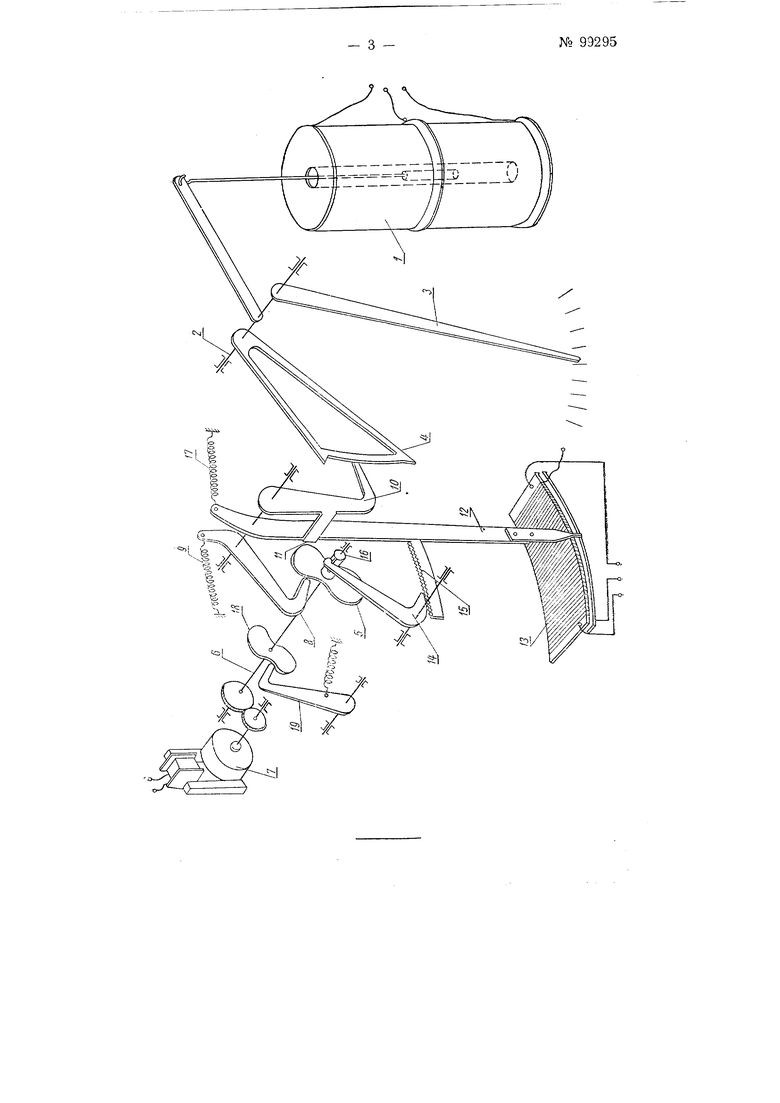
На чертеже изображено устройство предложенного реостатного датчика обратной связи, применительно к схеме автоматического регулирования, в которой контролируемый процесс замеряется прибором /. На оси 2 подвижной системы прибора закреплены указатель 3 и фигурное лекало 4.
Профильный кулачок 5 непрерывно с равномерной скоростью вращается на оси 6 при помощи синхронного электродвигателя 7, периодически поднимая рычажок 8, жестко закрепленный па отдельной оси и снабженный возвратно пружиной 9.
На общей оси с рычажком 8 укреплен второй рычажок Ш, поворачиваюп.1,ийся под действием прз жины 9 вместе с первым и увлекающий за собой при помощи пальца 77 свободно сидящий па той же оси рычаг /2 с укрепленным на его конце контактным движком реостатного датчика /5.
Перемещение под действием пружины 9 движка рычага 12 по реостату датчика 13 нроисходит до упора конца рычажка 10 своим концом в лекало 4.
При подъеме рычажка 10 кулачком 5 рычаг 12 с движком остается на месте, удерживаемый собачкой J4 и зубчатой рейкой 75.
Профиль лекала подобран таким образо.м, что оиределенному положению указателя 3 прибора соответствует соотвртству опл;ий угол поворота рычажка7ГЛ j
В момент, когда виадина кулачка 5 находится иод . рычажка 6, выступ кулачка /6 поднимает собачку 14, которая освобождает зубчатую рейку 15.
Если при этом рычажок 10 повернется иа меньший угол, чем в предыдущий раз, то рычаг 12 иод действием пружины 77 повернется до соприкосновения с пальцем 77.
Таким образом, ползунок перемещается по реостату 13 датчика в зависимости от изменения угла отклонения рычажка 10, а положение последнего, в свою очередь, определяется положением лекала 4, укрепленного на подвижной системе измерительного прибора.
Второй профильный кулачок 7S и нажимающий на него рычансок 19 служат для ликвидации мертвого хода основного кулачка 5.
Предмет изобретения
1. Реостатный датчик, преимущественно для автоматических регуляторов, в котором для устранения дополнительной нагрузки подвижной системы первичного измерительного прибора контактный движок реостата не имеет механической связи с указанной системой, удерживается в занятом положении стопором, периодически освобождается от стопора и перемещается соответственно положению указателя измерительного прибора: в одном направлении вспомогательным двигателем, а в обратном -пружиной, отличаю и; и и с я тем, что, с целью упрощения конструкции датчика, механическая передача от двигателя к контактному движку состоит из системы кулачков,закрепленных иа вращаемой двигателем ведущей оси, и двух рычагов, закрепленных на оси, к которой свободно подвешен , и один из указанных кулачков взаимодействует с одним из рычагов, преобразуя вращательное движение оси в качательное движение оси движка, второй кулачок осуществляет за каждый оборот оси освобождение движка от стопора, а второй из рычагов при каждом своем колебании сцепляется с контактным движком и перемещает его до своего упора в лекало, закрепленное на поворотной оси подвижной системы измерительного прибора.
2. Датчик по п. 1, отлпчающ и и с я тем, что третий из кулачков, закрепленный на вех;ущей оси, взаимодействует с дополнительным поворотным рычагом, нагруженным пружиной, для устранения мертвого хода этой оси.