(5) ДАТЧИК УГЛОВОЙ СКОРОСТИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик угловой скорости | 1979 |
|
SU928231A1 |
| Датчик угловой скорости | 1975 |
|
SU600445A1 |
| Способ бесконтактного определения направления вращения и измерения скорости вращения объекта | 2024 |
|
RU2831667C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1996 |
|
RU2142643C1 |
| Двухимпульсный регулятор по скорос-Ти и уСКОРЕНию дВигАТЕля ВНуТРЕННЕгОСгОРАНия | 1979 |
|
SU806887A1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЯ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115129C1 |
| Устройство для определения направления и скорости вращения вала | 2024 |
|
RU2832123C1 |
| ХМЕЛЬНИЦКАЯ СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ УГЛОВОЙ СКОРОСТИ ТЕПЛОВОЙ ТУРБИНЫ | 1991 |
|
RU2010301C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ КОНСТРУКТИВНОГО ЭЛЕМЕНТА ГРУЗОПОДЪЕМНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2376239C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВЫХ СКОРОСТЕЙ | 1995 |
|
RU2115128C1 |
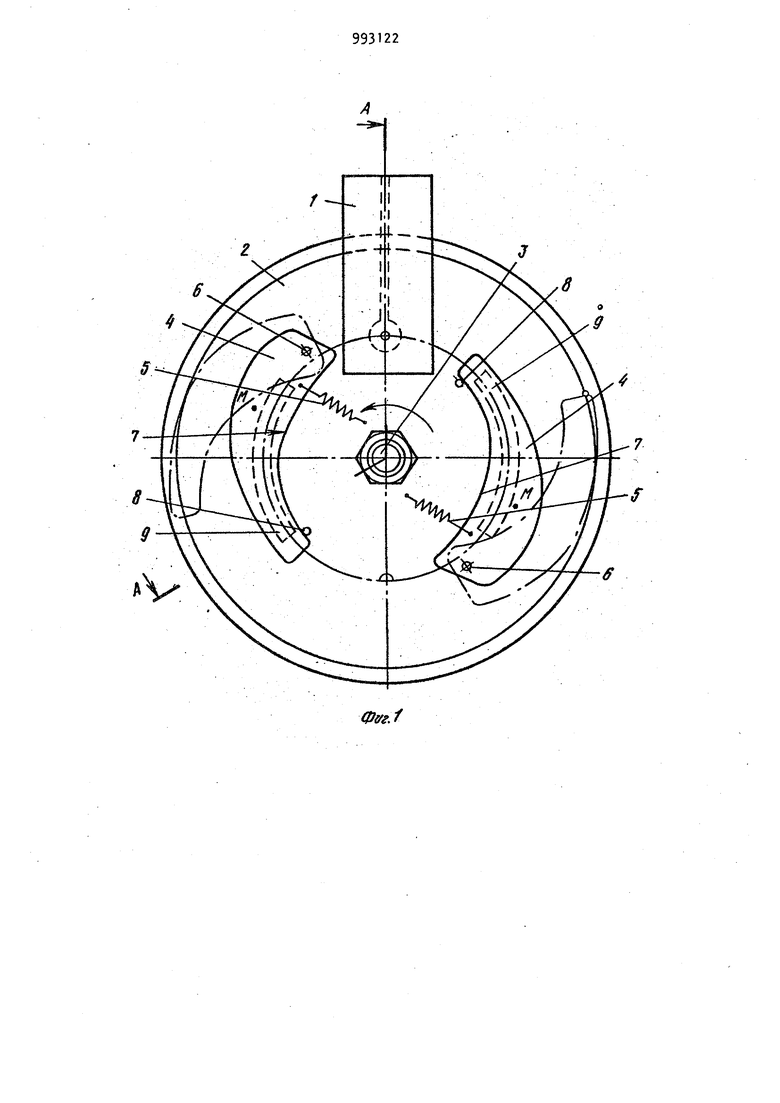
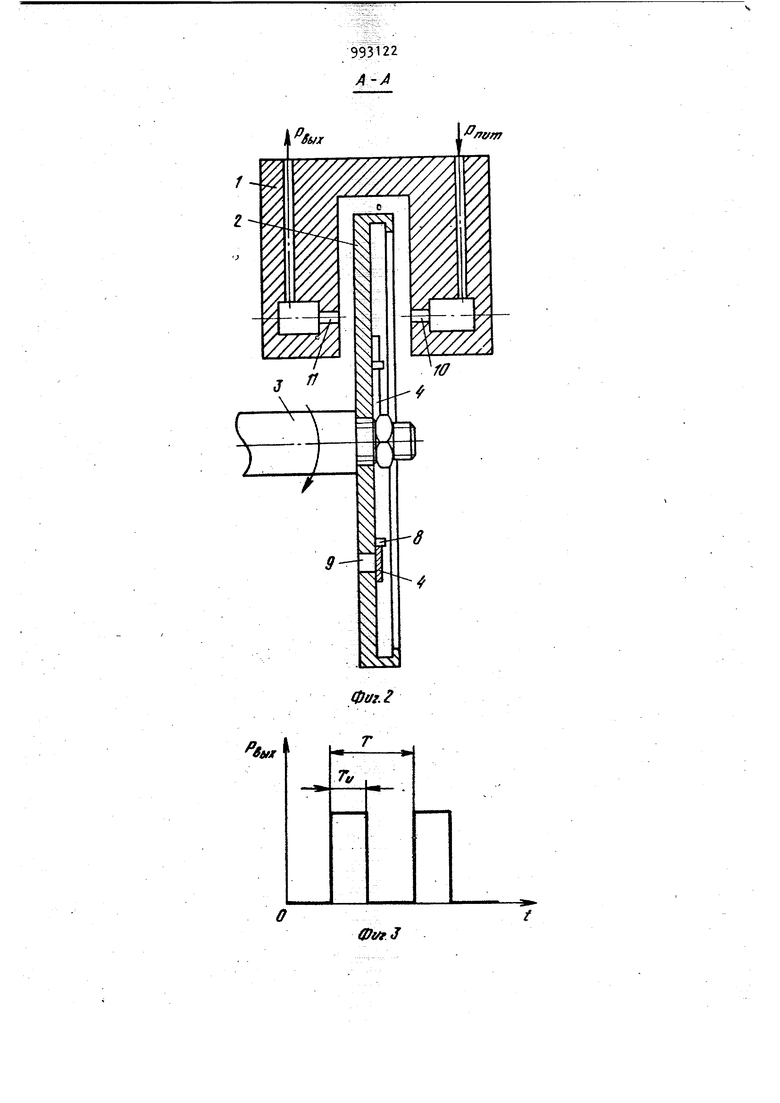

Изобретение относится к системам автоматического регулирования и.может быть использовано в качестве дат чика двухимпульсного регулятора в си стемах автоматического управления двигателями внутреннего сгорания и трансмиссиями транспортных средств. Известен чувствительный элемент (датчик ) двухимпульсного регулятора системы автоматического управления двигателями, состоящий из звездочки со скошенными пазами, укрепленной на валу привода, помещенными в пазах сферическими грузами, конической тарелки корпуса датчика и выходной муф ты 11 Недостатком этого чувствительного элемента является необходимость использования дополнительного преобразователя его выходного сигнала (меха нического перемещения муфты ) в случае использования гидравлических или пневматических исполнительных устройств системы управления. Известен пневматический датчик угловой скорости, содержащий струйный элемент типа сопло-сопло и ротор с закрепленными на нем корректирующимиэлементами в виде четырех подпружиненных зубчатых секторов, подвижных в радиальном направлении относительно ротора. Зубцы секторов, имеющие специальный профиль, периодически пересекают струю при вращении ротора. Под действием центробежных сил секторы, а вместе с ними и зубцы смещаются относительно оси струйного элемента. При этом скважность импульсов изменяется как заранее заданная функция скорости вращения и профиля зубцов С 2 J Недостатком датчика является невозможность измерения углового ycKori рения дополнительно и одновременно с угловой скоростью. Цель изобретения - расширение функциональных возможностей датчика путем дополнительного измерения углового ускорения. Поставленная цель достигается те что в датчике угловой скорости, со / ёржащем струйный элемент типа сопл сопло, который взаимодействует с ротором, кинематически связанным с контролируемым валом и имеющим прорези и подпружиненные корректирующие, элементы, последние выполнены в виде поворотных заслонок, которые имеют профилированную рабочую кромку и установлены с возможностью пер крытия упомянутых прорезей ротора, оси поворота заслонок не совпадают с их центром тяжести и параллельны оси вращения ротора. На фиг. 1 изображен датчик угловой скорости; на фиг. 2 - разрез Ана фиг.1; на фиг. 3 график измене ния выходного давления датчика; на фиг. А и 5 - силы, действующие на элементы датчика при равномерном и не равномерном вращении соответственно Датчик угловой скорости (.фиг. 1 и :.состоит из неподвижного струйного элемента 1 типа сопло-сопло, 2, кинематически связанного с контролируемым валом 3, двух одинаковых корректирующих элементов 4, подпружиненных относительно ротора посредством упругих элементов 5 на пример пружин растяжения. Каждый ко ректирующий элемент k выполнен в ви де плоской поворотной заслонки с центром тяжести в точке М и осью 6 поворота, закрепленной на роторе параллельно его оси вращения и не совпадающей с центром тяжести(точка М). Боковая поверхность 7 служит рабочей кромкой корректирующего эле мента k и выполнена профилированной На роторе 2 смонтированы упоры 8 дл фиксации корректирующих элементов k в исходном положении при неподвижном роторе. В роторе выполнены окна 9в виде дугообразных прорезей. Струйный элемент t имеет входное 10 и приемное 11 сопла. Входное сопло 10соединено с источником давления жидкости, выходное сопло 11 - с регистрирующим устройством. Датчик работает следующим образом.. При неподвижном вале 3 корректирующие элементы k перекрывают окна 9 вроторе 2, препятствуя прохождению через них струй жидкости из соп ла 10 в сопло 11. Вследствие этого 24 давление в выходном сопле 11 струйного элемента 1 равно нулю при любом положении ротора 2. При вращении вала 3 и достижении им определенной скорости, соответствующей установочному усилию упругих элементов 5, корректирующие элементы k под действием центробежных сил поворачиваются вокруг осей 6, приоткрывая окна Э- При прохождении открытой части окон 9 мимо струйного элемента 1 жидкость из сопла 10 попадает всопло 11,и, таким образом, в выходном канале возникает импульс давления. Длительность импульса Т (фиг.З) зависит от рабочей длины окна 9 и скорости его прохождения мимо струйного элемента 1. Период Т следования импульсов давления Рд обратно пропорционален угловой скорости вала 3. При равномерном вращении вала 3 каждому значению угловой скорости Lu соответствует определенное положение корректирующих элементов относительно окон 9- Это установившееся положение достигается при равенстве моментов, создаваемых центробежной силой инерции Рц и силой натяжения Р упругого элемента 5(фиг.) относительно оси 6 поворота корректирую1(его элемента: нв тгш I ,k(S-So) масса корректирующего элемента А; радиус расположения центра тяжести корректирующего элемента (точки М) относительно оси вращения ротора 2 (точка О-,); жесткость упругого элемента 5; длина упругого элемента 5 при данной угловой г скорости и в свободном состоянии соответственно; плечи действия сил Рц и соответственно относительно оси 6 поворота. При неравномерном вращении контролируемого вела 3 на корректирующий элемент Ц помимо сил Р.. и Р ц действует тангенциальная составляющая Р, силы инерции (фиг.5), которая вызывает дополнительное отклонение корректирующего элемента по сравнению
с отклонением при установившемся значении угловой скорости UJ
,РГ mrt,
где С т- угловое ускорение контролируемого вала 3. Влияние силы Fy на выходной сигнал датчика выражается в изменении скважности импульсов. При ускорении сила F,r поворачивает кбрректируклций элемент в том же направлении, что и центробежная сила Гц, а при замед лении - в противоположном (на фиг.5 вектор силы F при ускорении показан сплошной стрелкой, при замедлении - штриховой ), Конкретная велиЧина отклонения определяется из уравнений:
Fj.y+ F-j-c при ускорении; Fqoi F-rj-- при замедлении где С - плечо действия силы относительно оси 6 поворота.
Изменяя профиль боковой поверхности 7f можно обеспечить различные зависимости длительности импульсов Тц от угловой скорости UJ , например ее постоянство в рабочем диапазоне изменения угловой скорости, а также линейное увеличение или уменьше ние и т.д.
Изменяя взаимное расположение цеи.ра тяжести корректирующего элемента k точка М )и оси 6 его поворота точка 02) можно также изменить корректирующий эффект от действия тангенциальной составляющей EJ, силы инерции.
Формула изобретения
Датчик угловой скорости, содержащий струйный элемент типа соплосопло, ротор, кинематически связанный с контролируемым валом и имеющий прорези и подпружиненные корректирую щие элементы, отличающийс я тем, что, с целью расширения функциональных возможностей, -корректирующие элементы выполнены в виде поворотных заслонок, которые имеют профилированную рабочую кромку и установлены с возможностью перекрытия упомянутых прорезей ротора, а оси поворота заслонок не совпадают с их центром тяжести и параллельны оси вращения ротора,
Источники информации, принятые во внимание при экспертизе
Фffг.f
90122
Фг/f
