(5) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РЕВЕРСИВНЫМ ЭЛЕКТРОПРИВОДОМ





| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления перемещением объекта | 1981 |
|
SU957170A1 |
| ТЕЛЕГРАФНЫЙ МНОГОПРОВОДНЫЙ КОММУТАТОР | 1971 |
|
SU294262A1 |
| Многоканальный регулятор | 1979 |
|
SU873207A1 |
| Устройство для управления распределенными объектами | 1979 |
|
SU781774A1 |
| Устройство для управления исполнительным механизмом | 1977 |
|
SU746409A1 |
| САМОНл\СТРАИВАЮ1ЦЕЕСЯ УСТРОЙСТВО ДЛЯ АКТИВНОГО КОНТРОЛЯ РАЗМЕРОВ ДЕТАЛЕЙ | 1971 |
|
SU419716A1 |
| Устройство для решения задач типа балансирования сборочной линии | 1983 |
|
SU1167622A1 |
| Прибор для прозвонки жил многопроводного кабеля | 1990 |
|
SU1812527A1 |
| Командоаппарат | 1988 |
|
SU1522153A1 |
| Устройство для вычисления оптимального распределения нагрузок на теплоэлектроцентрали | 1972 |
|
SU475632A1 |

Изобретение относится к технике автоматического управления электроприводом и может быть использовано например, на линии нанесения металлических покрытий, при необходимости перемещения деталей по позициям и получения точных конечных положений.
Известно устройство для позиционного управления приводом перемещения объекта, содержащее элемент задания места остановки, выполненный в виде позиционного распределителя, датчик фактического положения привода, выполненный на базе путевых многоконтактных переключателей и исполнительного реле, причем выходы позиций элемента задания места остановки подсоединены через соответствующие им первые размыкающие контакты путевых переключателей к общей точке соединения вторых размыкающих контактов, соединенных последовательно, а цепочка вторых размыкающих контактов подключена к исполнительным реле 1.
Недостатком устройства является большое количество датчиков позиций, что приводит к усложнению конструкции линии нанесения покрытий при работе нескольких таких устройств, oi- раничивает величину зоны работы устройства и требует дополнительную переналадку внешнего монтажа при увеличении числа обслуживаемых позиций. Устройство не обеспечивает автоматического управления.
Известно устройство для автоматического управления передвижения объекта, содержащее элементы задания адреса, датчики положения объекта, одним из выводов соединенные между собой, а другими выводами - с соответствующими выводами элементов задания адреса, другие выводы которых соединены между собой и подключены к параллельно соединенным через , встречно включенные между точками соединения ЕЫводоэ датчиков положения и элементов задания адреса, и блок питания, выполненный на источник,е постоянного тока и включенный через ограничительный элемент последовательно с разделительными элементами, вторая точка параллельного соединения командных блоков соединена с точкой соединения выводов датчиков положения объекта, и параллельно ему включен релейный элемент l - - Недостатком устройства является большое число датчиков положения, что приводит к усложнению конструкции; ограничивает величину зоны работы устройства; требует дополнительную переналадку внешнего монтажа при увеличении числа позиций, что не обеспечивает быстрой смены программы управления .
Известно устройство для управления реверсивным электроприводом, содержащее датчики положения объекта; два элемента И, первый элемент задержки, блок запуска, блок питания, первый, второй и третий инверторы, третий инвертор связан выходом со входами второго и четвертого элементов И, четвертый, пятый и шестой инверторы и седьмой инвертор, шестой инвертор связан выходом с первым эходом второго элемента задержки, а также релейный эп&лст Г31
Недостатком данного устройства является большое число датчиков положения, что приводит к усложнению конструкции, ограничива.ет величину зоны работы устройства и не обеспечивает быстрой смены программы управления.
Под зоной работы реверсивного привода объекта необходимо понимать число позиций, обслуживаемых данным объектом. Зоны работы нескольких реверсивных приводов объектов должны обязательно перекрываться, что обуславливает перенос обрабатываемых деталей. Перекрытие двух зон обуславливается заездом на общие позиции двух приводов объектов. Перекрытие трех и более зон, т.е. заезд на общие позиции трех и более приводов объектов конструктивно трудно выполнимо, требует больших затрат,а с другой стороны повышает производительность.
Установкой датчиков на перемещающихся объектах, мы добьемся уменьшения количества датчиков до числа перемещающихся реверсивных приводов без снижения производительности.
Цель изобретения - уменьшение числа датчиков положения при различном количестве рабочих зон и различной их ширине и обеспечение быстрой переналадки программы управления.
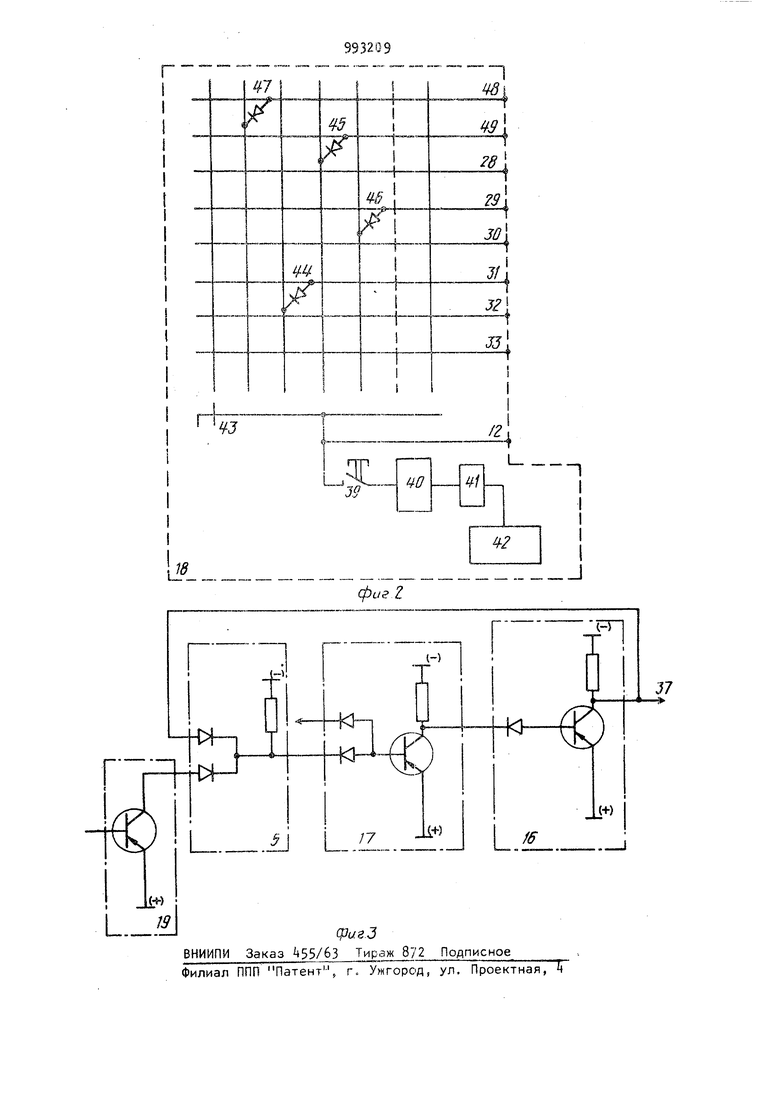
Поставленная цель достигается тем, что в устройство, содержащее датчик положения объекта, блок питания, блок запуска, последовательно соединенные первый элемент И, первый инвертор, атвторой инвертор и второй элемент И и последовательно соединенные третий элемент И, третий инвертор, четвертый инвертор, первый элемент задержки и четвертый элемент И, выход которого соединен с выходом устройства, второй зход первого элемента задержки подключен к выходу второго инвертора, и к первому входу первого элемента И, второй вход которого соединен с выходом пятого инвертора и с первым входом третьего элемента И, второй вход которого подключен к выходу четвертого инвертора и к второму выходу устройства, первый выход блока питания соединен с первым выходом датчика положения объекта и через обмотку первого релейного элемента - с вторым выходом датчика положения, третий выход которого подключен к второму выходу блока питания, первый выход блока запуска соединен с вторым входом первого инвертора, второй выход - с вторым входом третьего инвертора, второй элемент задержки выходом подключенный через шестой инвертор ко второму входу четвертого элемента И, второй элемент релейный, пятый элемент И, первый и второй усилительные элементы и реверсивный шаговый искатель, первая обмотка которого одним выводом через первый усилительный элемент подключена к выходу второго элемента И, вторым выводом - к третьему выходу блока питания, к второй обмотке реверсивного шагового искателя, второй Езыаод которой через второй усилительный элемент соединен с выходом пятого элемента И, первый вход которого подключен к выходу четвертого инвертора, второй вход - к второму входу второго элемента И и к перЕюму контакту первого релейного элемента, второй контакт которого соединен с входом пятого инвертора, первый и второй контакты второго релейного элемента подключены к первому выходу блока питания, и к третьему выходу блока запуска, вход второго элемента .задержки соединен с вторым контактом второго релейного элемента и с вторым контактом первого релейного элемента, обмотка второго релейного элемента первым выводом подключена к щетке реверсивного шаг вого искателя, вторым выводом - к второму выходу блока питания. При такой схеме устройство имеет один датчик положения, который устанавливается на объекте перемещения, переключение скорости объекта и точный его останов на позициях осуществляется с помощью неподвижных металлических лыж, устанавливаемых на позициях обслуживаемых объектом. Зона работы устройства может быть различной, неподвижная металли ческая лыжа может служить для сраба тывания датчиков положения других аналогичных объеков, имеющих в разное время одинаковый адрес на позицию. Переналадка програм1«ы устройства управляющего объектом не связана с переналадкой электромонтажа линии. На фиг. 1 приведена схема устройства; на фиг. 2 - схема блока за пуска J на фиг. 3 схема поступлени сигналов направления движения. На фиг. 1 показан датчик 1 положе ния объекта, первый и второй элемен ты 2 и 3 задержки, элементы И -8, блок Э питания, первый и второй релейные элементы 10 и 11, выходы 1214 блока 9 питания, первый инвертор 15, второй инвертор 1б, первый инве тор 17, блок 18 запуска, пятый инве тор 19, третий инвертор 20, четвертый инвертор 21, первый 22 и второй 23 усилительные элементы, контакт реверсивного шагового искателя, первая обмотка 25 и вторая обмотка 2б, реверсивного шагового искателя, контакт 27 релейного элемента, выходы 28-33 блока запуска, контакты релейных элементов, выходы 37 и 38 устройства. На фиг. 2 показана схема блока запуска, содержащего кнопку 39, уси литель 0, шаговый искатель 41, исTOMHi K k2 постоянного тока, щетки 43 шагового искателя, диоды . выходы 48 и 9 направления движения Блок 18 запуска начинает свою ра боту по командам оператора после на жатия на кнопку 39. В узлах диодной сетки установлены диоды, которые обе печивают появление сигналов на выходах блока 18 по цепи: выход 12, щетка 43 шагового искателя, ламель, программный диод, выход блока 18, Переключение шагового искателя на новую ламель после нажатия на кнопку 39 происходит по другой цепи: вход 12, кнопка 39, усилитель Q, обмотка шагового искателя k, источник 42 питания. Для переключения шагового искателя необходимо нажать, а потом отпустить кнйпку 39 Обмотка 41 шагового искателя, сначала включается, а потом обесточивается.JМеханика шагового искателя переведет щетку шагового искателя на новую ламель. На фиг. 3 изображена цепь поступления сигнала направления .движения из блока 18 запуска и формирование сигнала Вперед 37 с помощью инверторов 16 и 17 и элемента И 5. Аналогично формируется сигнал Назад 38 при поступлении сигнала направления движения из блока 18 запуска, с помощью инверторов 20 и 21 и элемента И 6 (фиг. 1).В исходном положении реверсивный шаговый искатель 24 находится, например, на первой ламели, соединенной с адресной шиной 28 (первая позиция). Работа схемы начинается с поступления из блока 18 запуска сигналов направления движения и адреса. После первого нажатия оператором кнопочного элемента 39, шагового искателя 43 переключается на вторую ламель . Отрицательный потенциал tсигнал 1) из блока 9 питания по цепи 12 поступает в блок 18 запуска, далее через щетку 13 шагового искателя диод 47 появится на выходе 48, который подключен Через первый разделительный диод на базу транзистора и инвертора 17. После второго нажатия оператором кнопки 39, щетка шагового искателя 43 переключается на третью ламель. Отрицательный потенциал (сигнал 1) из блока 9 питания по цепи 12 поступит в блок 18 запуска, далее через щетку шагового искателя 43 диод 44 появится на выходе 31. Сигнал направления движения 48 к позиции 31 возникает первым и действует кратковременно, что обусловлено работой оператора. Обмотка релейного элемеита 11, подключенная к адресной шине 31, по электрическим 7 параметрам выбирается такой, чтобы после ее подключения на шине 12(-) и 13 (-) источника 9 питания через блок 18 запуска обеспечивалось ее включение Цепь включения обмотки следующая: вход 12 источника 9 пита ния, щетка шагового искателя блока 18, третья ламель, диод й, выход 31, щетка реверсивного шагового искателя 24, обмотка релейного элемен та 11 р положительная шина питания 13 блока 9 питания. Сигнал направления движения наза задается блоком 18 запуска. После третьего нажатия оператором кнопки 39 щетка шагового искателя переключ ется на четвертую ламель (фиг. З). Отрицательный потенциал (сигнал 1 из блока 9 питания по цепи 12 посту пает в блок 18 запуска, далее через щетку шагового искателя 43 диод 45 появляется на выходе 48. который по ступает чурез первый разделительный диод на бззу транзистора инвертора 20 . После четвертого нажатия операто ром кнопки 39 щетка шагового искателя 43 переключается на пятую лау.ель. Отрицательный потенциал (сигнал V) из блока 9 питания по цепи 12 поступает в блок 18 запуска, далее через щетку шагового искателя 43 йиод 46 появляется на выходе 29. Адресная шина 29 (вторая позиция) обеспечивает вкльочение релейного элемента 11 по цепи: вход 12 источника 9 питания (фиг,- 1), щетка шаго вого искателя 43, пятая ламель, диод 46, выход 29, щетка реверсивного шагового искателя 24. релейный элемент 11, положительная шина 13 питания источника 9. Сигнал направления движения 48 возникает первым и действует кратко временно в виде импульса отрицатель ной полярности. Он запоминается с п мощью элементов 5, 16, 17 фиг. 1 и 3) Сигнал поступает через первый разделительный диод на базу транзистора инвертора 17, транзистор откры вается, подавая потенциал эмиттера на разделительный диод инвертора 16 нормально открытый транзистор инвертора 1б закрывается, подавая отрицательный потенциал коллектора на разделительный диод элемента И 5Этим самым обеспечивается появление постоянного отрицательного потенциала на втором входе инвертора 17 и 9 постоянного отрицательного потенциала на выходе инвертора 1б (сигнал Е перед 37) , ибо действие этого потенциала по обратной связи аналогмчно действию сигнала iS направления движения. Сигнал Вперед 37 поступает на первый вход элемента И 7, При нахождении объекта на исходной первой позиции срабатывает от металлической датчик 1 положения, включая обмотку первого релейного элемента 10,который, своим замыкающим контактом 27 через размыкающий контакт 3 Рбупейного элемента 1 1 подает отрицательный потенциал первой шины 12 на второй вход элемента И 7. Наличие 1 (отрицательный подвух сигналов на входах элемента И 7 обестенциалпечивает появление 1 отрицательного потенциала на входе первого усилительного элемента 22, который включае первую обмотку 25 реверсивного шагового искателя 24 (точка , 2). Одновременно сигнал Вперед 37 обеспечивает движение объекта с первой позиции к четвертой позиции на низкой скорости. При выходе неподвижной металлической лыжи первой позиции из зазора датчика 1 положения устанавливаемого на перемещающемся объекте, обмотка релейного элемента 10 обеспечивается, замыкающий контакт 27 размыкается, отрицательный потенциал (сигнал 1) на втором входе элемента И 7 пропадает и обмотка 25 реверсивного шаг(5вого искателя обеспечивается. Происходит перешагивание реверсивного шагового искателя на вторую ламель, подключенную к адресной шине 29 блока 18 запуска. Через некоторое время от сигнала 37 Вперед на выходе в орого элемента 3 задержки появляобеспечивая появе ся сигнал ление сигнала Высокая скорость на выходе элемента И , ибо на его первый вход от инвертора 15 в исходном состоянии поступает сигнал 1, 06biiект начинает двигаться к четвертой позиции на высокой скорости. При проео)де объектом неподвижной металлической лыжи второй позиции от датчика 1 положения включается обмотка первого релейного элемента 10, который своим замыкающим контактом 27 включает через элементы 7 и 22 первую обмотку 25 реверсивного шагового искателя 2k, которая обестачивается при выходе неподвижной металлической лыжи из зазора датчика 1 положе ния (точка 46 фиг. 2). Реверсивный шаговый искатель 2А переключается на третью ламель, подключенную к адресной шине 30. Аналогичным образом при проезде объекта управления третьей позиции происходит переключение реверсивного шагового ис кателя на четвертую ламель, которая соединена с адресной шиной 31. Временная диаграмма (фиг. 2) для случая описываемого выше, показывает, что при возникновении сигнала Вперед через некоторое время, определяемое элементом задержки.появляется сигнал Высокая скорость, а релейный элемент 10 дважды срабатывает, причем время, за которое происходят эти срабатывания,зависит от расстояния между соседними позициями. Как подчеркивалось, при задании адреса четвертой позиции, блок 18 запуска на четвертой ламели реверсивного шагового искателя 2Ц включает, обмотку релейного элемента 11 постоянно до приезда объекта на чет вертую позицию. Замыкающий контакт 36 релейного элемента 11 замыкается, а размыкающий его контакт 3 размыкается (фиг. 1). С входа элеме та И 7 снимается разрешающий сигнал и обмотки 25 и 26 шагового искателя обестачиваются на весь период до появления нового сигнала направления движения и сигнала адреса из блока запуска 18. Через некоторое время определяемое элементом задер ки 2, замыкающий контакт 2б через элементы 2, 15 подает запрещающий сигнал О на вход элемента k, си нал Высокая скорость исчезает. Эт время выбирается меньшем, чем время перемещения объекта на соседнюю позицию на высокой скорости. Объект на низкой скорости переме щается к заданной блоком 18 запуска четвертой позиции. При наезде объекта на неподвижную металлическую лыжу четвертой позиции от датчика 1 положения включается обмотка первого релейного элемента 10, кото рый своим замыкающим контактом 35 обеспечивает появление сигнала Останов (контакт 36 второго релейного элемента остается замкнутым) на базе транзистора инвертора 19. Транзистор открывается, обеспечивая появление потенциала эмиттера на втором разделительном диоде инвертора 17. Транзистор инвертора 17 закрывается, подавая отрицательный потенциал коллектора через разделительный диод на базу транзистора инвертора 1б. Транзистор открывается, обеспечивая на выходе потенциала эмиттера, который появляется на входе второго разделительного диода инвертора 17. Происходит сброс сигнала Вперед 37, и объект останавливается на заданном блоком l8 запуска адресе. Аналогичным образом, работает схема при адресации на следующую, например вторую позицию. Сигнал направления движения Назад 38 задается блоком l8 запуска. Запоминание этого сигнала обеспечивается с помощью элементов 6, 20, 21. Преимущественно описываемой схемы заключается в том, что адресация на заданную позицию осуществляется одним датчиком положения, который устанавливается на объекте перемещения. Переключение скорости объекта и точный его останов на позиции осуще-, ствляется с помощью одной неподвижной металлической лыжи, устанавливаемой на позиции, обслуживаемой объектом, и одного датчика положения, устанавливаемого на объекте перемещения. Зона работы устройства может быть различной, неподвижная металлическая лыжа может служить и для срабатывания датчиков положения других аналогичных объектов, имеющих в разное время одинаковый адрес на позицию. Переналадка программы блока 18 запуска, управляющего объектом не связана с переналадкой электромонтажа линии. Применение двух устройств, работающих на предлагаемой схеме, требует наличия двух датчиков положения, что упростит электромонтаж линии, снизит издержки по содержанию линии, упростит переналадку при смене программы работы. Формула изобретения Устройство для управления реверсивным электроприводом, содержащее . датчик положения объекта, блок питания, блок запуска, последовательно соединенные первый элемент И, первый инвертор, второй инвертор и второй 11 элемент И и последоветельно соединен ные третий элемент И, третий инвертор, четвертый инвертор первый элемент задержки и четвертый элемент И выход которого соединен с выходом устройства, второй вход первого элемента задержки подключен к выходу второго инвертора и к первому входу первого элемента И,, второй вход которого соединен с выходом пятого ин вертора и с первым входом третьего элемента И, второйвход которого подключен к выходу четвертого инвертора и к второму выходу устройства, первый выход блока питания соединен с первым выходом датчика положения объекта и через обмотку первого релейного элемента - с вторым выходом датчика положения, третий выход которого подключен к второму выходу блока памяти, первь й выход блока запуска соединен с вторым зходон первого инаертора, второй выходс вторым входом третьего инвертора, второй элемент задержки, выходом подключенный через шестой инвертор к второму входу четвертого элемента И, ОТ- л и ч а КЗ щ е е с я TejM что, с целью уменьшения числа датчиков положения и обеспечения быстрой переналадки программы управления, в него введены второй релейный элемент пятый элемент И, первый и второй уси лительные элементы и реверсивный шаговый искатель, первая обмотка которого одним выводом через первый 9 ус;илительный элемент подключена к выходу второго элемента И, вторым выводом - к третьему выходу блока питения, к второй обмотке реверсивного шагового искателяS второй вывод которой через второй усилительный элемент соединен с выходом пятого элемента И, первый вход которого подключен к выходу четвертого инвертора, второй вход - к второму--входу второго элемента И и к первому контакту первого релейного элемента,, второй контакт которого соединен с входом пятого инвертора, первый и второй контакты второго релейного элемента подключены к первому выходу блока питания и к третьему выходу блока запуска ; вход второго элемента задержки соединен с вторым контактом второго релейного элегмента и с вторым контактом первого релейного элемента, обмотка второго релейногО элемь:нта первым выводом подключена к щетке реверсивного шагового искателя, вторым выводом - к второму выходу блока питания, i Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР rf 570882, кл, G 05 В 19/08, 197. 2.Авторское свидетельство СССР № 646310, кл. G 05 В , 1976. 3.Авторское свидетельство СССР N 767706, кл. G 05 В 19/Оч, 1978 (грототип).
«о
1
//7
П
Ж 28
9
30
4
J/
J/
Л
