1
Изобретение относится к устройствам автоматического управления технологическими процессами и может быть использовано в окрасочных линиях и линиях нанесения металлических покрытий на изделия автомобильной промышленности.
Известно устройство, содержащее индикаторы, регуляторы, соединенные с каналами параметра местного и внешнего задания и выходным каналом, и блоки вызова по числу регуляторов, состоящие из повторителей, реле и переключателей, причем в каждом блоке вызова установлены два электропневмопреобразователя, управляющие входы которых соединены с соответствукмцими переключателями, выход первого электропневмопреобразователя подключен к управляющим камерам реле данного блока, входы первого электропневмопреобразователя соединены с каналом.питания и атмосферой, входы второго электррпневмопреобразователя -,с каналами местного и внешнего задания, входы повторителей соединены, соответственно, с каналами параметра, выходом второго электропневмопреобразователя и выходным каналом, а входы повторителей через последовательно
соединенные реле блоков вызова и аналоговые пневмоэлектрические преобразователи подключены к индикаторам l .
Недостатком данного устройства является то, что число электропневмопреобразователей в два раза больше, чем число регуляторов, автоматическое управление обеспечивается блоком
10 внешнего задания и не учитывает истинного положения изделия на линии. Кроме того, это устройство сложно и вследствие этого ненадежно.
Известен многоканальный регулятор,
15 содержащий последовательно соединенные входной электрический коммутатор, блок сравнения с задатчиком уставок, выключатель и выходной электрический коммутатор, пневматический
20 аналоговый формирователь сигнала управления, с задатчиком, электропневматические переключатели, элементы памяти и электропневматический аналоговый преобразователь, связанный с
25 выходом входного электрического, коммутатора и входом пневматичеякого аналогового регулятора, выход которого через элементы памяти соединен с соплами электропневматических переключателей, обмотки которых соединень
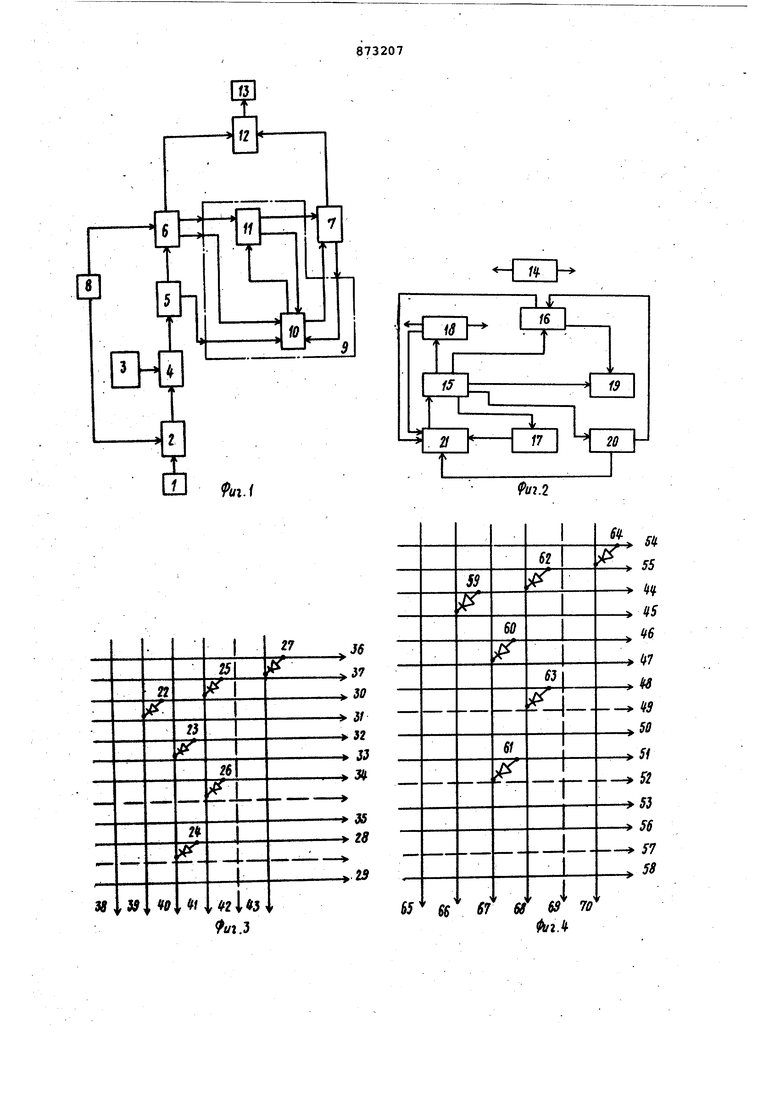
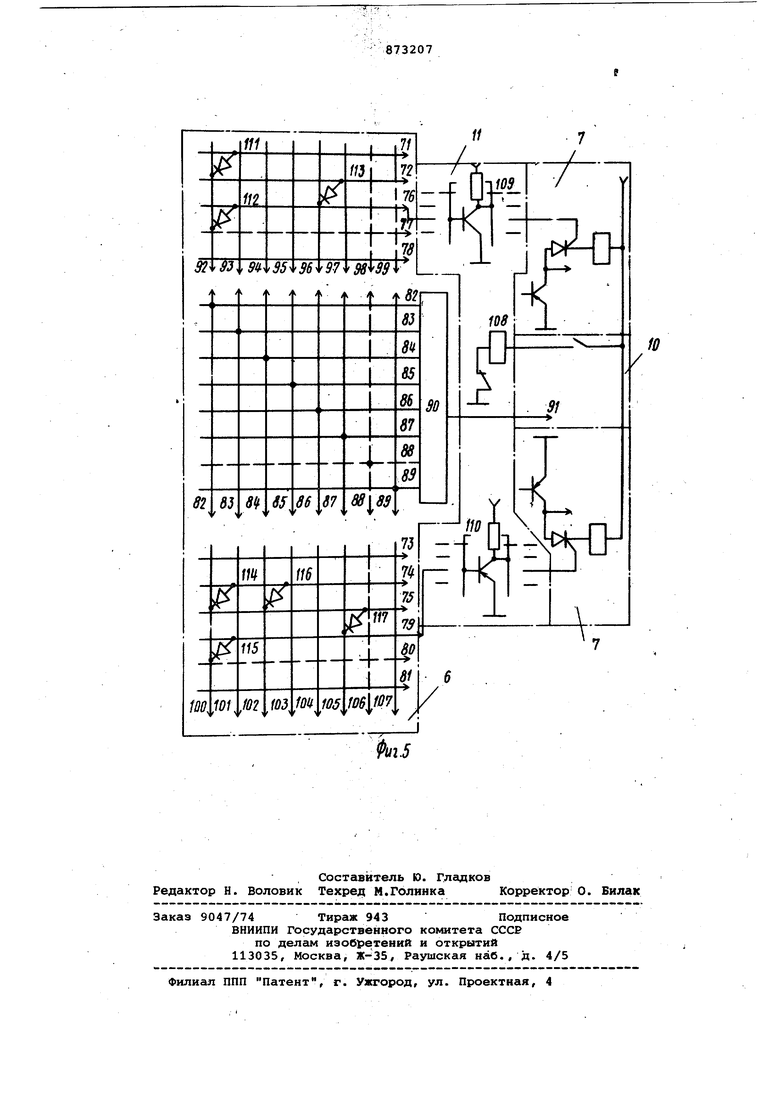
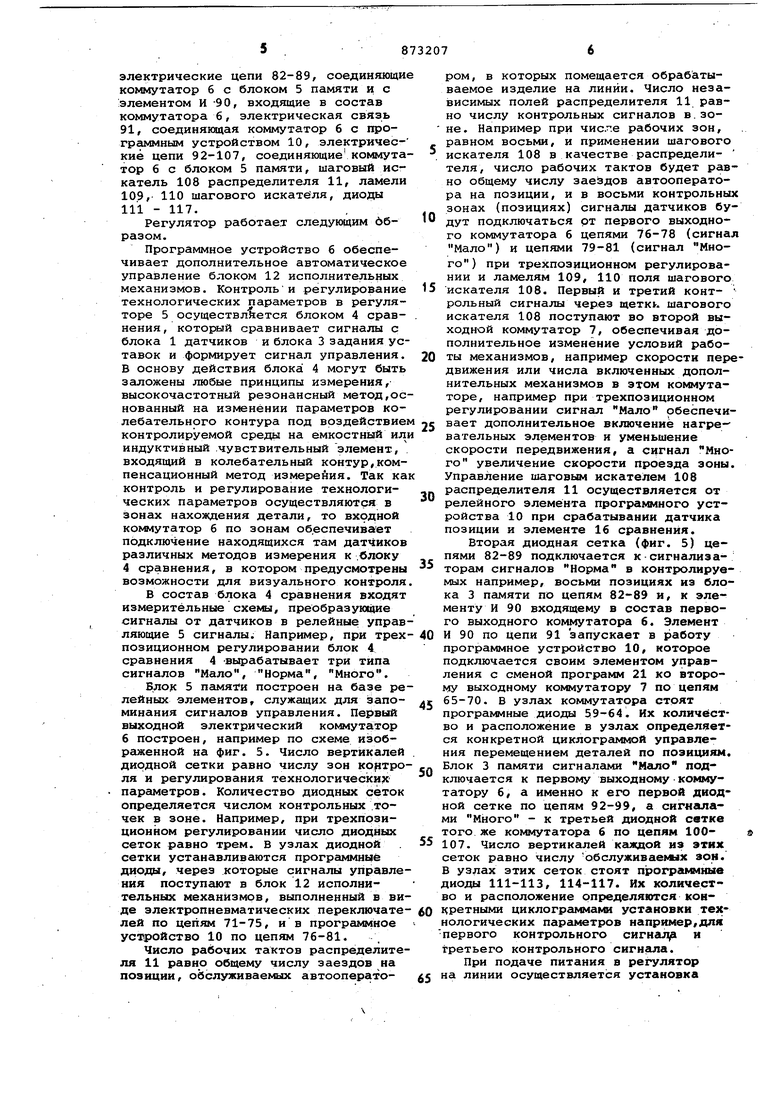
30 с выходом выходного электрического коммутатора Г2. Недостатком этого регулятора является то, что он не обеспечивает авто атическое управление исполнительными механизмами и изменение условий их работы (например скорости передвижения или числа включенных дополни- тельно исполнительных механизмов) при отклонении технологических параметров от нормы в зоне нахождения детали. Известен многоканальный регулятор содержащий блок управления и последо вательно соединенны блок датчиков, блок измерителей рассогласования,, входной коммутатор, формирователь си нала управления с блоком Псшяти, пер вый выходной коммутатор и блок испол нительных механизмов, причем первый, второй и третий выходы блока управле ния соединены, соответственно, с управляющими входамш входного и первого и второго выходных коммутаторов, второй выходной коммутатор соединен с выходом блока исполнительных механизмов ГзЗ . Недостатком этого регулятора явля ется низкая точность при подключении дополнительных исполнительных механизмов . Наиболее близким по технической сущности является многоканальный регулятор, содержащий блок задания уставок, первый блок управления и пос-; ледовательно соединенные блок датчиков, входной коммутатор, блок сравне ния, блок йамяти, первый выходной ком мутатор и блок исполнительных механизмов, выход блока задания уставок соединен со вторым входом блока срав нения, выходы первого блока управЗхения соединены, соответственно, с управляющими входами входного и первого выходного коммутатора Г4}. Недостатком данного регулятора яв ляется его ограниченные функциональные возможности, следствием чего является ограниченная область его применения. Цель изобретения - расширение ,. функциональных возможностей регулято ра.. Поставленнгш цель достигается тем что в регуляторе установлены второй выходной коммутатор и второй блок управления, первый, второй, третий, четвертый входы которого соединены соответственно, со вто1и«4 .и третьим выходами первого выходного коммутато ра, вторьвк выходом блока памяти и первым выходом второго выходного ком мутатора, а первый и второй выходыс первымпв. вторым входами второго выходного коммутатора, второй выход которого соединен со вторьм входом блока исполнительных механизмов. На фиг. 1 приведена блок-схема регулятора иа фиг. 2 - блокгсхема программного устройства}на фиг, 3 электрическая схема элемента формирования программ; на фиг. 4 - электрическая схема второго выходного коммутатора на фиг; 5 - схема первого выходного коммутатора. Многоканальный регулятор содержит блок 1 датчиков, входной коммутатор 2, блок 3 задания уставок, блок 4 сравнения, блок 5 памяти, первый и второй выходной коммутаторы 6 и 7, первый и второй блоки 8 и 9 управления, программное устройство 10, распределитель 11, блок 12 исполнительных механизмов, объект регулирования автооператор 13, источник 14 питания, элемент 15 формирования программ, элемент 16 сравнения, элемент 17 задержки, элемент 18 синхронизации, . элементы 19 и 20 управления гориэонтальн1:1м и вертиксшьным перемещением , элемент 21 управления сменой программ, диоды 22-27, электрические цепи 28-29 соединяющие элемент 15 формирования . программ с выходайи датчиков позиций в элементе 16 сравнения, электрические цепи 30-33, соединяющие элемент 15 формирования программ с элементами 19 и 20 управления горизонтальным и вертикальным перемещением, электрические цепи 34-35, соединяю1цие элемент 15 формирования программ с элементом 17 задержки, электрическая цепь 36, соединякжцая элемент 15 формирования программ с элементом 21 управления сменой nporpauviM, электрическая цепь 37, соединяющая элемент 15 формиров.ния программ с элементом 18 синхронизации, входные электрические цепи 38-43, электрические цепи 44-47, соединяющие коммутатор 7 с эл ента-. ми 19 и 20 управления горизонтальными и вертикальным перемещенйеМ|электрические цепи 48-50, соединяющие коммутатор 7 с элементом 17 згщержки, электрические цепи 51-53, соединяющие коммутатор 7 с элементом 16 сравнения, электрическая цепь54, соединяющая коммутатор,7 с элементом 21 управления сменой программ, электрическая цепь 55, соединяющая крммутатор 7 с элементом 18 синхронизации,электрическая цепь 56, соединяющая коммутатор 7 с блоком 12 исполнительных механизмов, в качестве которых кюгут применяться, например электропневматические преобразователи, электрические цепи 57-58, соединяющие коммута- тор 7 с промежуточными элементами управления в блоке 12 исполнительных механизмов, диоды 59-64, электрические цепи 65-70, соединяющие элемент 21 управления сменой программ, программного управления 10 с выходным коммутатором 7, электрические цепи соединяющие коммутатор 6 с блоком 12 исполнительных механизмов, электрические цепи 76-81,. соединяющие коммутатор 6с распределителем 11 электрические цепи 82-89, соединяющи коммутатор б с блоком 5 памяти и с элементом И -90, входящие в состав коммутатора 6, электрическая свЯзь 91, соединяющая коммутатор 6 с программным устройством 10, электрические цепи 92-107, соединяющие коммута тор 6 с блоком 5 памяти, шаговый искатель 108 распределителя 11, ламели 109, 110 шагового искателя, диоды 111 - 117., Регулятор работает следующим 66разом. Программное устройство б обеспечивает дополнительное автоматическое упразвление блоком 12 исполнительных механизмов. Контрольи регулирование технологических параметров в регуляторе 5 осуществлйется блоком 4 сравнения, который сравнивает сигналы с блока 1 датчиков и блока 3 задания уставок и формирует сигнал управления. В основу действия блока 4 могут быть заложены любые принципы измерения,высокочастотный резонансный метод,ос нованный на изменении параметров колебательного контура под воздействие контролируемой среды на емкостный ил индуктивный чувствительный элемент, входящий в колебательный контур,компенсационный метод измерения. Так ка контроль и регулирование технологических параметров осуществляются в зонах нахождения детали, то вх9дной коммутатор б по зонам обеспечивает подключение находящихся там датчиков различных методов измерения к .блоку 4 сравнения, в котором предусмотрены возможности для визуального контроля В состав блока 4 сравнения входят измерительные схемы, преобразующие сигналы от датчиков в релейные управ ляющие 5 сигналы; Например, при трех позиционном регулировании блок 4 сравнения 4 вырабатывает три типа сигналов Мало, Норма, Много. Блок 5 паиляти построен на базе ре лейных элементов, служащих для запоминания сигналов управления. Первый выходной электрический коммутатор 6 Построен, например по схеме изобрс1женной на фиг. 5. Число вертикалей диодной сетки равно числу зон кортро ля и регулирования технологических параметров. Количество диодных сеток определяется числом контрольных точек в зоне. Например, при трехпрзиционном регулировании число диодНых сеток равно трем, в узлах диодной . сетки устанавливаются программные диоды, через .которые сигналы управления поступают в блок 12 исполнительных механизмов, выполненный в виде электропневматических переключателей по цепям 71-75, ив программное устройство 10 по цепям 76-81. Число рабочих тактов распределителя 11 равно общему числу заездов на позиции, обслуживаемых автооператором, в которых помещается обраб тываемое изделие на линии. Число независимых полей распределителя 11 равно числу контрольных сигналов в. зоне. Например при числе рабочих зон, равном восьми, и применении шагового искателя 108 в качестве распределителя, число рабочих тактов будет равно общему числу эае:здов автооператора на позиции, и в восьми контрольных зонах (позициях) сигналы датчиков будут подключаться от первого выходного коммутатора 6 цепями 76-78 (сигнал Мало) и цепями 79-81 (сигнал Много) при трехпоз щионном регулировании и ламелям 109, 110 поля шагового искателя 108, Первый и третий конт- рольный сигналы через щеткк шагового искателя 108 поступают во второй выходной коммутатор 7, обеспечивая дополнительное изменение условий работы механизмов, например скорости передвижения или числа включенньлх дополнительных механизмов в этом коммутаторе, например при трехпозиционном регулировании сигнал Мало обеспечивает дополнительное включение нагревательных элементов и уменьшение скорости передвижения, а сигнал Много увеличение скорости проезда зоны. Управление шаговым искателем 108 распределителя 11 осуществляется от релейного элемента программного устройства 10 при срабатывании датчика позиции и элементе 16 сравнения. Вторая диодная сетка (фиг, 5) цепями 82-89 подключается к-сигнализаторам сигналов Норма в контролируемых например, восьми позициях из блока 3 памяти по цепям 82-89 и, к элементу И 90 входящему в состав первого выходного коммутатора 6. Элемент И 90 по цепи 91 запускает в работу программное устройство 10, которое подключается своим элементом управления с сменой программ 21 ко второму выходному коммутатору 7 по цепям 65-70, В узлах коммутатора стоят программные диоды 59-64. Их количество и расположение в узлгис определяется конкретной циклограммой управления перемещением деталей по позициям. Блок 3 памяти сигналами Мало подключается к первому выходному коммутатору 6, а именно к его первой диодной сетке по цепям 92-99, а сигнгшами Много - к третьей диодной сетке того же коммутатора 6 по цепям 100107. Число вертикалей кгмшой из этих сеток равно числу обслуживаемых зон. В узлах этих сеток стоят программные диоды 111-113, 114-117. Их количество и расположение определяются конкретными циклограммами установки технологических параметров например,для первого контрольного сигнги и третьего контрольного сигнала. При подаче питания в регулятор на линии осуществляется установка
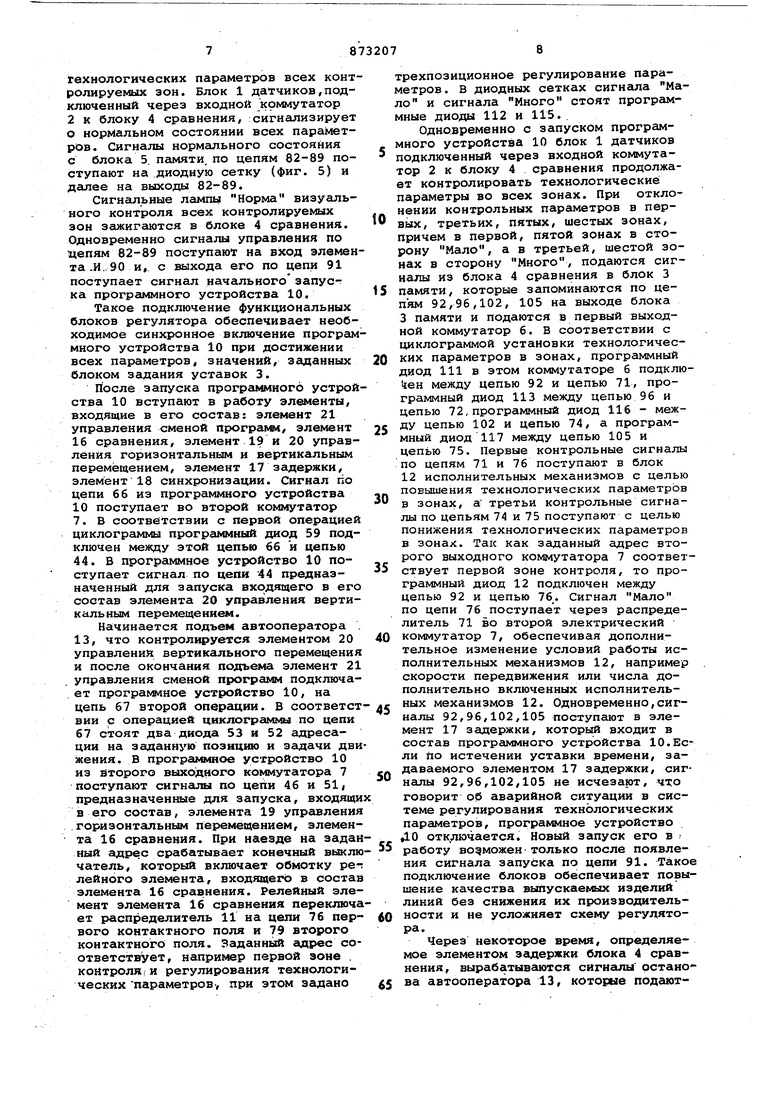
технологических параметров всех контролируемых зон. Блок 1 датчиков,подключенный через входной коммутатор 2 к блоку 4 сравнения, :сигнсшизирует о нормальном состоянии всех параметров. Сигналы нормального состояния с блока 5. , по цепям 82-89 поступают на диодную сетку (фиг. 5) и далее на выходы 82-89.
Сигнсшьные лампы Норма визуального контроля всех контролируемых зон зажигаются в блоке 4 сравнения. Одновременно сигналы управления по цепям 82-89 поступают на вход элемента .И. 90 и, с выхода его по цепи 91 поступает сигнал начального запуст ка программного устройства 10.
Такое подключение функциональных блоков регулятора обеспечивает необходимое синхронное включение программного устройства 10 при достижении всех параметров, значений, заданных блоком задания уставок 3.
После запуска прогрг1ммног6 устройства 10 вступают в работу элементы, входящие в его состав: элемент 21 управления сменой програьм, элемент 16 сравнения, элемент 19 и 20 управления горизонтальным и вертикальным перемещением, 17 задержки, элемент 18 синхронизации. Сигнал rio цепи 66 из программного устройства 10 поступает во второй коммутатор 7. В соответствии с первой операцией циклограммы программный диод 59 подключен между этой цепью 66 и цепью 44. В nporpeiMMHoe устройство 10 поступает сигнал по цепи 44 предназначенный для запуска входящего в его состав элемента 20 управления вертикальным перемещением.
Начинается подъем автооператора . 13, что контролируется элементом 20 управления вертикального перемещения и после окончания подъема элемент 21 управления сменой программ подключает програкмное устройство 10, на цепь 67 второй операции. В соответствии с операцией циклогрс1ммы по цепи 67 стоят два диода 53 и 52 адресации на заданную позицию и задачи движения. В програ1Фшое устройство 10 из йторого выходного коммутатора 7 поступают сигналы по цейи 46 и 51, предназначенные для запуска, входящи в его состав, элемента 19 управления горизонтальным перемещением, элемента 16 сравнения. При наезде на заданный адрес срабатывает конечный выключатель, который включает обмотку pet лейного элемента, входящего в состав элемента 16 сравнения. Релейный элемент элемента 16 сравнения переключает распределитель 11 на цепи 76 первого контактного поля и 79 второго контактного поля. Заданный адрес соответствует, например первой зоне , контроля и регулирования технологических параметров, при этом задано
трехпозиционное регулирование параметров . В диодных сетках сигнала Мало и сигнала Много стоят программные диоды 112 и 115.
Одновременно с запуском программного устройства 10 блок 1 датчиков подключенный через входной коммутатор 2 к блоку 4 сравнения продолжает контролировать технологические параметры во всех зонах. При отклонении контрольных параметров в первых, третьих, пятых, шестых зонах, причем в первой, пятой зонах в сторону Мало, а в третьей, шестой зонах в сторону Много, подаются сигналы из блока 4 сравнения в блок 3 памяти, которые запоминаются по цепям 92,96,102, 105 на выходе блока 3 памяти и подаются в первый выходной коммутатор 6. В соответствии с циклограммой установки технологических параметров в зонах, программный диод 111 в этом коммутаторе 6 подклюkeH между цепью 92 и цепью 71, программный диод 113 между цепью 96 и цепью 72,программный диод 116 - между цепью 102 и цепью 74, а программный диод 117 между цепью 105 и цепью 75. Первые контрольные сигналы по цепям 71 и 76 поступают в блок 12 исполнительных механизмов с целью повышения технологических параметров в зонах, а третьи контрольные сигналы по цепьям 74 и 75 поступают с целью понижения технологических параметров в зонах. Так как заданный адрес второго выходного коммутатора 7 соответствует первой зоне контроля, то программный диод 12 подключен между цепью 92 и цепью 76. Сигнал Мало по цепи 76 поступает через распределитель 71 во второй электрический коммутатор 7, обеспечивая дополнительное изменение условий работы исполнительных механизмов 12, например скорости передвижения или числа дополнительно включенных исполнительных механизмов 12. Одновременно,сигналы 92,96,102,105 поступают в элемент 17 задержки, которьй входит в состав программного устройства 10.Если По истечении уставки времени, задаваемого элементом 17 задержки, сигналы 92,96,102,105 не исчезают, что говорит об аварийной ситуации в системе регулирования технологических параметров, программное устройство ДО отключается. Новый запуск его в работу возможен только после появления сигнала запуска по цетш 91. Тако подключение блоков обеспечивает повышение качества выпускаемых изделий линий без снижения их производительности и не усложняет схему регулятора.
Через некоторое время, определяемое элементом задержки блока 4 сравнения, вырабатываются сигналы рстаио ва автооператора 13, которые подаются на элемент 19 управления горизонтальным перемещением и на элемент 21 управления сменой программ. Все эти элементы входят в состав програм много устройства 10. Распределитель элемента управления сменой программ 221 переключается на третью операцию на цепь 68. Сигналы цепи 68 через программные диоды 62 и 63 второго вы ходного коммутатора 7 поступают по цепям 55 и 48 в элементы 18 синхрони зации и задержки 17 программного уст ройства 10. После истечения технологической выдержки времени элемент 17 вырабатыва ет сигнал, поступающий в элемент 21 управления смено программ. Одновременно в этот элемент поступает сигнал 55 из элемента 18 синхронизации. Распределитель эле мента 21 управления сменой программ переключается на выполнение следующей операции. Таким образом, работает распределитель элемента 21 управления сменой программ npi любой временной циклограмме , входящей в состав программно го устройства 10. Распределитель 11 переключается сигналами от программного устройства 10, например при наезде автооператора 13 на запрограм мированную позицию. Блок 4 сравнения проводя непрерывный контроль и регулирование технологических параметров во всех зонах линии, через первый выходной коммутатор 6 обеспечивает дополнительное изменение условий работы исполнительных механизмов 12, подключенных ко рторому выходному коммутатору 7 через программные.диод в диодной сетке первого выходнохО коммутатора 6 по цепям 71 и 72, 76 78 (сигнал Мало) или цепям 73-75 и 79-81 (сигнал Много). В регуляторе обеспечивается отклю чение программного устройства 10,если технологические параметры в одной из зон автоматически не достигают за данных параметров через некоторое время.Преимуществом регулятора явля ется расширение его функциональных возможностей. Регулятор с помощью первого выходного коммутатора 6 осуществляет автоматическое регулирование технологических параметров по. циклогрс1мме, управляя электрическими и пневматическими исполнительными механизмами 12, ас помощью второго выходного коммутатора 7 управляет по циклограмме исполнительными механизмами 12, перемещения обрабатываемых изделий в зоне и дополнительными исполнительными механизмами. Применение предлагаемого многоканального регулятора, имеющего не сложную схему управления, позволяет повысить качество выпускаемой продукт ции без снижения производительности линии, что достигается путем включения сигналом от первого электрического коммутатора 6 программного устройства 10 в момент, когда значения технологических параметров в згщанных пределах, отключение программного устройства 10 при аварии в системе регулирования технологических параметров, дополнительное изменение условий работы блока 12 исполнительных механизмов, подключенных ко второму выходному коммутатору 7. В качестве второго выходного коммутатора 7 применяется устройство программного управления. В регуляторе могут быть реализованы любые методы изменения контро- . лируемых параметров, например темпе-. ратуры уровня. При этом число контролируемых параметров в разных зонах допускается в любых сочетаниях. Формула, изобретения Многоканальный регулятор,, содержащий блок задания уставок, первый блок управления и последовательно соединенные блок датчиков, входной коммутатор, блок сравнения, блок памяти, первый выходной коммутатор и блок исполнительных механизмов, выход блока задания уставок соединен со вторые входом блока сравнения, выходы первого блока управления соединены соответственно, с управляющими входами входного и первого выходного коммутатора, отличающийся тем, что, с целью расширения функциональных возможностей регулятора, в нем установлен второй выходной коммутатор и второй блок управления, первый, второй, третий и четвертой входы которого соединены, соответственно,. со вторым и третьим выходами первого выходного коммутатора, вторым выходом блока памяти и первым выходом второго выходного коммутатора, а первый и второй выходы - с первым и вторым входами второго выходного коммутатора, второй выход которого соединен :. со вторым входом блока исполнительных механизмов. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 594485, кл. С 05 В 23/00, 1974. 2.Авторское свидетельство СССР 612205,кл.С 05 В 11/32, 1974. 3.Авторское свидетельство СССР 330431, кл. С 05 В 1.5/02, 1970. 4.Давленко В.А. Электрические истемы регулирования с сигналом свяи постоянного тока. М., Энерги, 971, с. 14 (прототип).
r/J.3
г.
112
93.
т 35
2
97
96
в6
д7
S5
2
83
Г .
I 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления автоматическими линиями | 1977 |
|
SU744472A1 |
| Устройство программного управления автооператорами гальванической линии | 1980 |
|
SU943337A1 |
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1980 |
|
SU935876A1 |
| ГИДРАВЛИЧЕСКИЙ ПРЕСС | 2006 |
|
RU2334619C2 |
| Устройство управления тепловой обработкой бетона | 1985 |
|
SU1312525A1 |
| Устройство многоканального управления | 1979 |
|
SU974337A1 |
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1980 |
|
SU953625A1 |
| Устройство для программного регулирования температры | 1986 |
|
SU1374194A1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ЭЛЕКТРОАГРЕГАТОВ КОСМИЧЕСКИХ АППАРАТОВ | 2009 |
|
RU2402799C1 |
| Гидравлическая рулевая машина | 1981 |
|
SU969596A1 |