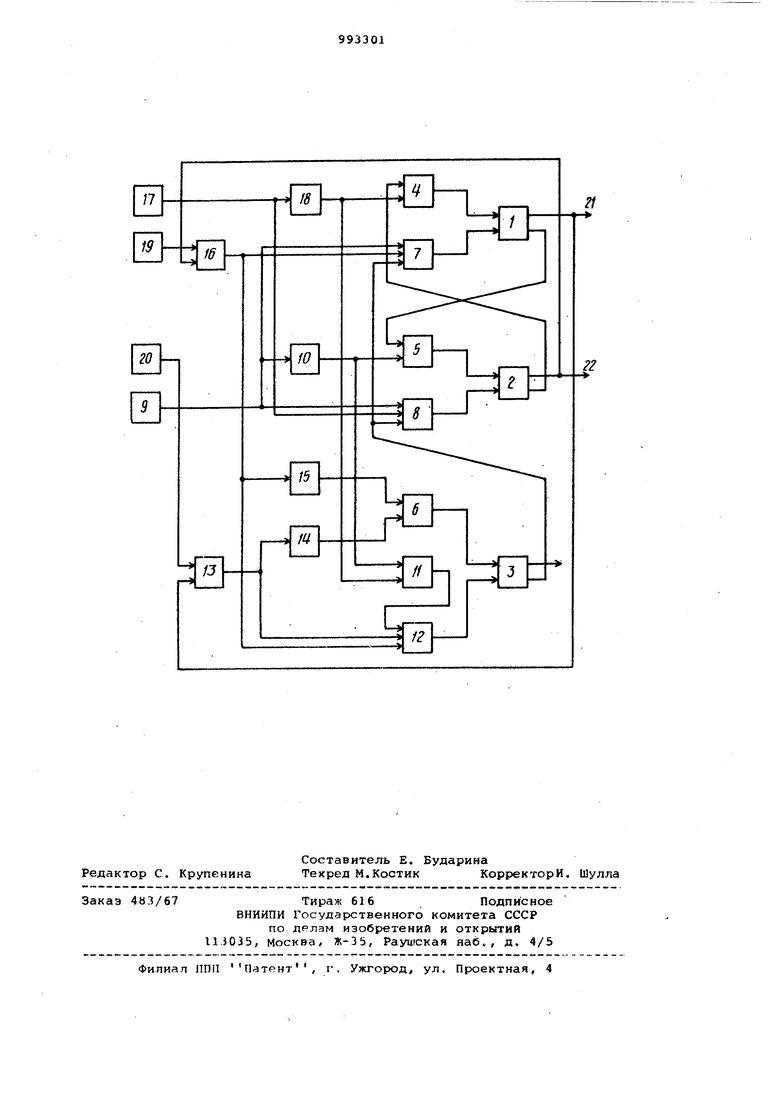
Изобретение относится к автоматической сигнализации и предназначено для авто1У1атизированных систем управления и контроля, в которых необходи определять и регистрировать направле ние движения объектов. Известно устройство для определения направления движения объектов,, содержащее датчики, двухвходовые и трехвходовые элементы И, триггерный регистр, элементы ИЛИ и НЕ, триггеры-индикаторы направления движения Вперед Назад 1. Недостаткрм указанного устройства является ограниченная область его пр менения. Наиболее близким к пред.пагаемому является устройство для определения направления движения объектов, содер жащее датчики, выходы которых соединены с первыми входами первого и вто рого элементов И и входами первого элемента ИЛИ, выход которого соедине с одним входом первого триггера, выходы первого и второго элементов И соединены с одними входами второго и третьего триггеров, одни выходы кото рых соединены с вторыми входами пер вого и второго элементов И, другие выходы третьего и четвертого триггеров соединены с одними входами третьего и четвертого элементов И, другие входы которых подключены к выходу первого триггера/ выходы третьего и четвертого элементов И соединены с . входами второго элемента ИЛИ, выход которого соединен с другими входами триггеров 2. Недостатком известного устройства является узкая область его применения. Це.г1ь изобретения - расширение области применения устройства для определения направления движения объектов . Поставленная цель достигается тем, что в устройство для определения направления движения объектов, содержащее первый и второй датчики, четыре элемента .И, два элемента ИЛИ и три триггера, инверсные выходы двух первых из которых соединены с первьми входами первого и второго элементов И, выходы которых соединены со счетными входами первого и второго триггеров, инверсный выход третьего триггера соединен с первыми входами третьего и четвертого элементов и, выход первого элемента ИЛИ соединен со счетный входом третьего триггера, прямой выход первого триггера соединен с .первьм входом второго элемента ИЛИ, введены третий и четвертый датчикиу пятый элемент И, четыре элемента НЕ, третий и четвертый элементы ИЛИ, выход первого датчика соединен с вторым входом четвертого элемента И и .входом первого элемента НЕ, выход ко торого соединен с первым входом третьего элемента ИЛИ и вторым входом первого элемента И, выход второго датчи ка соединен с первым входом четвертого элемента ИЛИ, второй вход которого подключен к прямому выходу второго триггера, выход четвертого элемента ИЛИ соединен с первым входом пятого элемента И, входом второго элемента НЕ и вторым входом третьего элемента И, выход которого соединен со сбросовым входом первого триггера, выход третьего датчика соединен с третьими входами третьего и четвертого элементов И и с входом третьего элемента НЕ, выход которого соединен с вторым входом третьего элемента ИЛИ и вторым входом второго элемента И, выход чет .вертого элемента И соединен со сбросовым входом второго триггера, выход четвертого датчика соединен с вторым входом второго элемента ИЛИ, выход которого соединен с вторым входом пятого Элемента И и входом четвертого элемента НЕ, выход которого соединен с первьм входом первого элемента ИЛИ второй вход.которого подключен к выходу второго элемента НЕ, выход тре. тьего элемента ИЛИ соединен с третьим входом пятого элемента И, выход которого соединен со сбросовым входом третьего триггера. На чертеже приведена схема предла- гаемого устройства. Устройство содержит триггеры 1-3, элементы И 4 и 5 (двухвходовые) , элементы ИЛИ 6, элементы И 7 и 8 (трехвходовые), датчик 9, элемент 10 НЕ, . элемент ИЛИ 11, элемент И 12 (трехвхо довый), элемент ИЛИ 13, элементы НЕ 14 и 15, элемент ИЛИ 16, датчик 17, элемент НЕ 18, датчики 19 и 20. Выходами устройства являются прямые выходы 21 и 22 триггеров 1 и 2. Две пары датчиков 17, 19 и 20 и 9 с потенциальными выходами расположены на одной линии таким образом,чтобы расстояние между датчиками в каждой паре было меньше длины движущегося объекта, т.е. чтобы зоны чувствитель ности датчиков каждой пары перекрыва лись для обеспечения разрешающей спо собности устройства по определению направления движения объектов. Устройство позволяет определять и регистрировать направление движения объектов, длина которых меньше расстояния между наиболее удаленными датчиками. Устройство работает следующим образом. При отсутствии движущегося объек-. та на прямых выходах триггеров 1 и 2, являющихся выходами 21 и 22 устройства, отсутствуют потенциалы. Триггеры 1-3 при этом находятся в состоянии, при котором элементы И 4, 5 и 8 подготовлены к открытию, элемент И 12 закрыт. Потенциалы с выходов элементов 1И 7 и 8 опрокидывают триггеры 1 и 2 Б нулевое состояние, если они были в единичном. При наличии объекта, длина которого меньше расстояния между парами датчиков 17, 19 и 20, 9,около датчика 17 сигнал (перепад потенциала от какого-то значения до нулевого) с его выхода через элементы НЕ 18 и И 4 опрокидывает в единичное состояние триггер 1, который инверсным выходом закрывает элемент И 5. Таким образом, потенциал, снимаемый с прямого выхода триггера 1, свидетельствует о движении объекта в одном направлении. При движении объекта мимо датчиков 17 и 19 сигнал с выхода датчика 19 через элементы ИЛИ 16, НЕ 15, ИЛИ б опрокидывает в единичное состояние триггер 3, который инверсным выходом закрывает элементы у 8. При движении( Объекта мимо датчика 19,между парами датчиков 17, 19 и 20,9 и мимо датчика 20 все элементы И закрыты, а триггеры 1 и 3 продолжают находиться в единично состоянии. При движении объекта мимо пары датчи- . ков 20 и 9 сигнал с выхода датчика 9 через элемент НЕ 10, элемент ИЛИ 11 и элемент И 12, подготовленный к открытию по одному входу потенциалом с выхода датчика 19 через элемент ИЛИ 16,а по другому входу - потенциалом с выхода триггера 1 через элемент ИЛИ 13, опрокидывает в нулевое состояние триггер 3, который инверсным выходом открывает элементы И 7 и 8. При движении объекта мимо датчика 9 в единичном состоянии находится только триггер 1, а после прохождения датчика 9 потенциалом датчика 19 через элемент ИЛИ 16 по одному входу и потенциалом с выхода датчика 9 по другому входу через подготовленный к открытию элемент И 7 триггер 1 опрокидывается в нулевое состояние и все устройство возвращается в исходное состояние. При обратном направлении движения объекта, длина которого меньше расстояния между парами датчиков 17,19 и 20,9, вначале появляется сигнал на выходе датчиков 9, от которого Опрокидывается в единичное состояние тригге,р 2, на прямом выходе 22 которого появляется потенциал, свидетельствующий о движении объекта в другом направлении.
При нахождении объекта около датчиков 9 и 20 сигнал с выхода датчика 20 через элементы ИЛИ 13, НЕ J.4, ИЛИ 6 опрокидывает в единичное состояние триггер 3, который своим инверсным выходом закрывает элементы И 7 и 8. При движении объекта далее между парами датчиков 9, 20 |i 19, 17 и мимо датчика 19 триггеры 1-3 продолжают находиться в том же состоянии. При движении объекта около датчиков 17 и 19 сигнал с выхода датчика 17 через элемент НЕ 18, ИЛИ 11, И 12, подготовленный к открытию по одному входу -.потенциалом с выхода датчика 20 через элемент ИЛИ 13, по другому входу потенциалом с выхода датчика 19 через элемент ИЛИ 16, опрокидывает триггер 3 в нулевое состояние.
При движении объекта около датчика 17 триггер 2 продолжает находиться в единичном состоянии и переходит в нулевое состояние после прохождения датчика 17.,
При движении объекта, длина которого больше расстояния между паргши датчиков, устройство работает аналогично рассмотренному случаю.
Регистрация направления движения от момента подхода объектов к первой паре датчиков до момента прохождения мимо второй пары датчиков в дозволенной степени, не нарушающей разрешающую способность устройства по опреде-лению направления движения объектов, позволяет помимо использования счетчиков использовать на выходах с ройства -различные индикаторные приборы (индикаторные лампочки стрелочные приборы и т.д.), что позволяет расширить область применения устройства.
Формула изобретения
- Устройство для определения направления движения объектов, содержгикее первый и второй датчики, четыре элемента И, два элемента ИЛИ и три триггера, инверсные вьосоды двух первых из которых соединены с первыми входами первого и второго элементов И, выходы которых соединены со счетньми входами первого и второго триггеров, инверсный выход третьего триггера соединен с первьми входами третьего и четвертого элементов И, выход первого элемента ИЛИ соединен со счетным входом третьего триггера, прямой ,
первого триггера соединен с первым входом второго элемента ИЛИ, от ли чающееся тем, что, с целью расширения области применения устройства, в него введены третий и четвертый датчики, пятый элемент И, четыре элемента НЕ, третий и четвертый элеI. мент ИЛИ, выход первого датчика соединен с вторьм входом четвертого элемента И и входом первого элемента НЕ,
выход которого соединен с первым входом третьего элемента ИЛИ и вторьм входом первого элемента И, выход второго датчика соединен с первьм входом четвертого элемента ИЛИ, второй вход
которого подключен к прямому выходу второго триггера, вьрсод четвертого элемента ИЛИ соединен с первьм входом пятого элемента И, входом второго элемента НЕ и вторым входом третьего
элемента И, выход которого соединен со сбросовьвл входом первого триггера, выход третьего датчика соединен с третьими входами третьего и четвертого элементов И и с входом третьего
элемента НЕ, выход которого соединен с вторьм входом третьего элемента ИЛИ -и вторым входом второго олемента И, выход четвертого элемента И соединен со сбросовьм входом второго триггера,
выход четвертого датчика соединен с вторьм входом второго элемента ИЛИ, выход которого соединен с вторым входом пятого элемента И и входом четвертого элемента НЕ, выход которого соединей с,первым входом первого элемента ИЛИ, второй вход которого подключен к выходу второго элемента НЕ, выход третьего элемента ИЛИ соединен с третью входом пятого элемента И, выход которого соединен со сбросовьм
входом третьего триггера.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 543979, кл. G 06 G 1/12, 1975.
2. Авторское свидетельство СССР 504220, кл. G 08 В 23/00, 1975 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения направления движения объектов | 1980 |
|
SU879620A1 |
| Устройство для задержки импульсов | 1984 |
|
SU1224997A1 |
| Устройство для моделирования процесса обслуживания заявок | 1988 |
|
SU1585801A1 |
| Преобразователь перемещения в код | 1983 |
|
SU1141574A1 |
| Устройство для измерения линейных и угловых перемещений | 1987 |
|
SU1462091A1 |
| Устройство для моделирования систем массового обслуживания | 1982 |
|
SU1086436A1 |
| Цифровой электропривод | 1983 |
|
SU1144181A1 |
| Устройство для моделирования процессов движения поездов | 1984 |
|
SU1196909A1 |
| Частотно-фазовый дискриминатор | 1986 |
|
SU1363432A1 |
| Двухпортовое устройство сопряжения в вычислительной системе | 1982 |
|
SU1156080A1 |