(54) СХВАТ МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Косилка | 1987 |
|
SU1440403A1 |
| Комбинированная машина для теребления и очесывания головок льна | 1937 |
|
SU52536A1 |
| ПРИВОД СКВАЖИННОГО НАСОСА | 2007 |
|
RU2353807C2 |
| Шахтное видеопередающее устройство | 1982 |
|
SU1059170A1 |
| КОЛЕБЛЮЩИЙСЯ ПРЕОБРАЗОВАТЕЛЬ ЭНЕРГИИ (ВАРИАНТЫ) | 2008 |
|
RU2386855C1 |
| ТЕАТРАЛЬНАЯ КУКЛА И КИСТЬ КУКЛЫ | 2006 |
|
RU2349360C2 |
| ПРОТЕЗ РУКИ ДЛЯ ПАЦИЕНТОВ СО СТЕПЕНЬЮ АМПУТАЦИИ ОТ ПАЛЬЦЕВ ДО ПРЕДПЛЕЧЬЯ, ПРОТЕЗ ЛУЧЕЗАПЯСТНОГО СУСТАВА, ВКЛЮЧАЮЩИЙ ПРОТЕЗ КИСТИ РУКИ, УСТРОЙСТВО БЛОКИРОВКИ ТРОСОВ ТЯГ ПАЛЬЦЕВ ПРОТЕЗА КИСТИ РУКИ (3 ВАРИАНТА), УСТРОЙСТВО УПРАВЛЕНИЯ КОМБИНАЦИЕЙ ПОЛОЖЕНИЯ ПАЛЬЦЕВ ПРОТЕЗА КИСТИ РУКИ (2 ВАРИАНТА) | 2017 |
|
RU2664171C1 |
| ХИРУРГИЧЕСКИЙ ОТРЕЗНОЙ И ФИКСИРУЮЩИЙ АППАРАТ С ПРИВОДОМ ОТ ДВИГАТЕЛЯ И МЕХАНИЧЕСКОЙ СМЫКАЮЩЕЙ СИСТЕМОЙ | 2007 |
|
RU2449747C2 |
| ХИРУРГИЧЕСКИЙ ОТРЕЗНОЙ И ФИКСИРУЮЩИЙ АППАРАТ С ПРИВОДОМ ОТ ДВИГАТЕЛЯ И МЕХАНИЧЕСКОЙ СМЫКАЮЩЕЙ СИСТЕМОЙ | 2007 |
|
RU2449750C2 |
| ХИРУРГИЧЕСКИЙ ОТРЕЗНОЙ И ФИКСИРУЮЩИЙ АППАРАТ С ПРИВОДОМ ОТ ДВИГАТЕЛЯ И СИСТЕМОЙ ОБРАТНОЙ СВЯЗИ С ПОЛЬЗОВАТЕЛЕМ | 2007 |
|
RU2449746C2 |
Изобретение относится к области робототехники и может быть использо вано в конструкциях распознающих роботов.
Известен схват манипулятора, содержащий основание, привод, устройство разведения пальцев и пальцы, выполненные из фаланг, связанных между собой шарнирами и снабженных тросиками и пружинами .
Недостатком известного схвата являются узкие технологические возможности, заключающиеся в том, что известный схват не может распознавать объекты, имеющие углубления.
Цель изобретения - расширение технологическихвозможностей.
Цель достигается тем, что схват снабжен устройством запирания пальцев, шкивом и валами, оси которых пересекаются с осью схвата и распо- ложены в плоскости,.перпендикулярной оси схвата, причем устройство запирания пальцев выполнено в виде полого вала с крестовиной и гребенчатых стопорных планок, а устройство р азведения пгшьцёв выполнено из ведущего полого вала с конической шестерней и ведомых конических шестерен, размещенных на каждом валу схватау
а концы тросиков пальцев закреплены на шкиве.
Крсвде того, каждый палец содержит две фаланги, причем вторые фаланги пальцев шарнирно закреплены на. валах и выполнены каждая в виде четверти кольца, а первые фаланги выполнены также каждая в виде четверти кольца и снабжены стержнем, расположенным
10 перпендикулярно плоскости этого кольца и со циненным с шарниром, связы- , вающим обе фаланги .
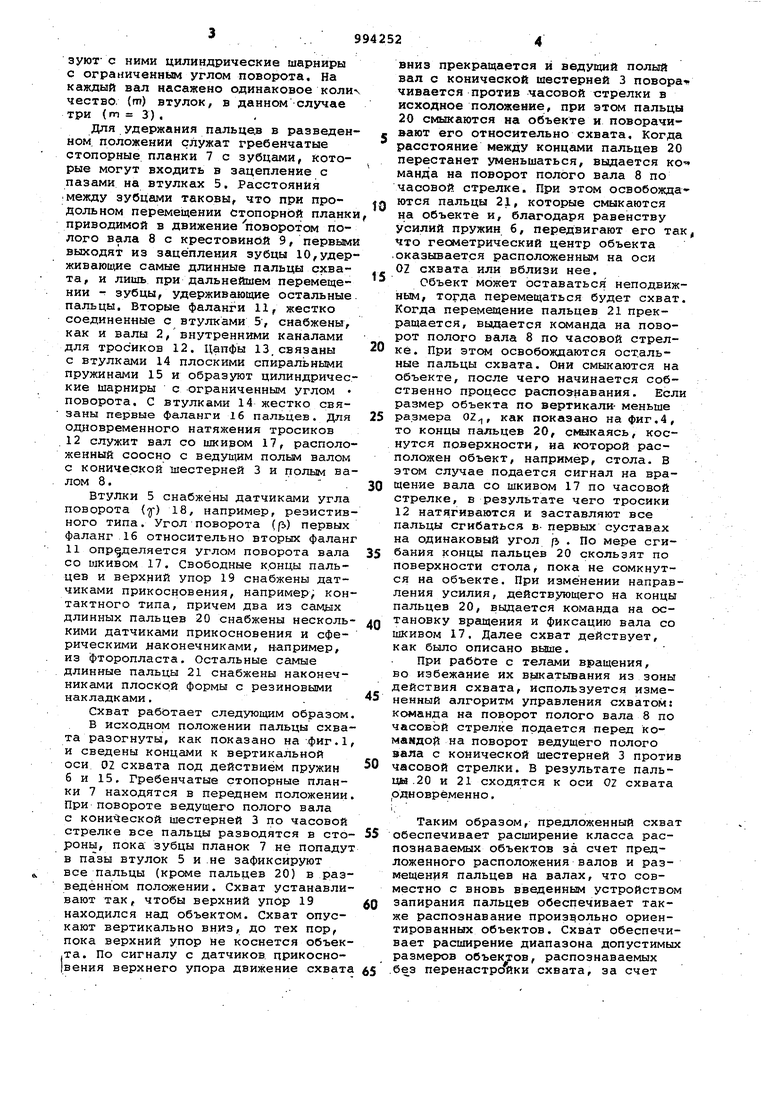
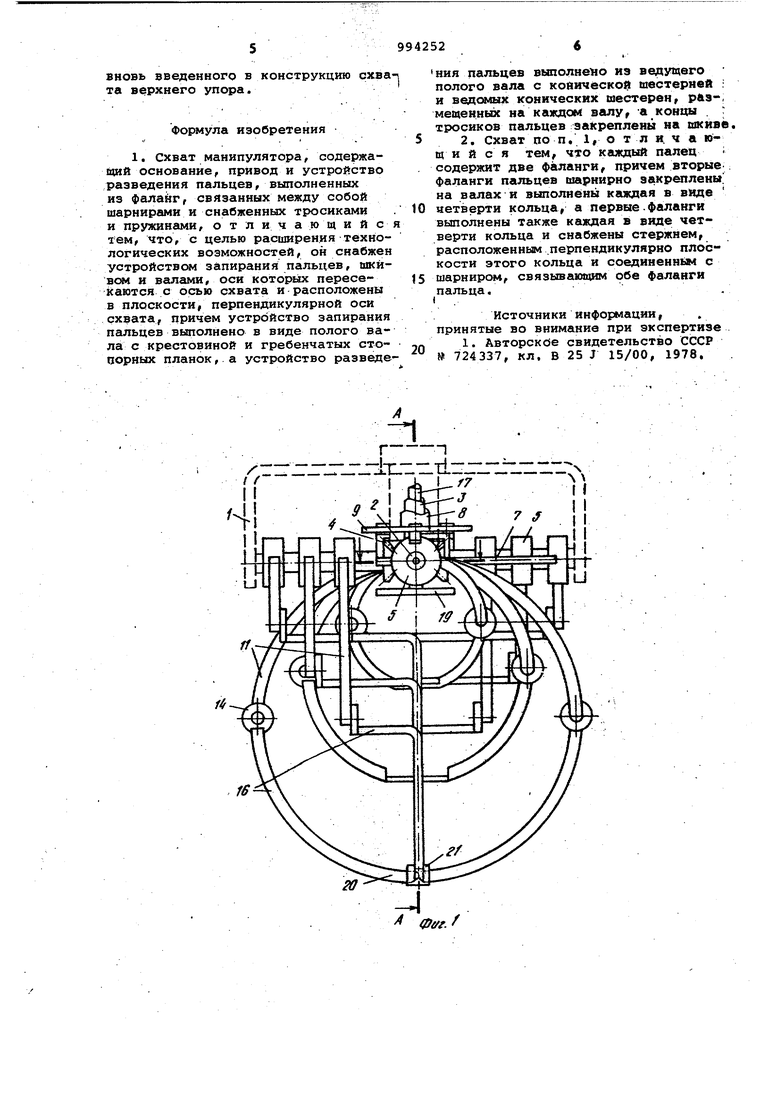
На фиг.1 изображен общий вид схвата с разогнутыми сомкнутыми пальца15ми (основание схвата показано.пунктиром} ; на фиг.2 - схват, вид сверху (основание схвата не показано); на фиг.З - разрез А-А фиг.1; на фиг.4 представлено схематическое
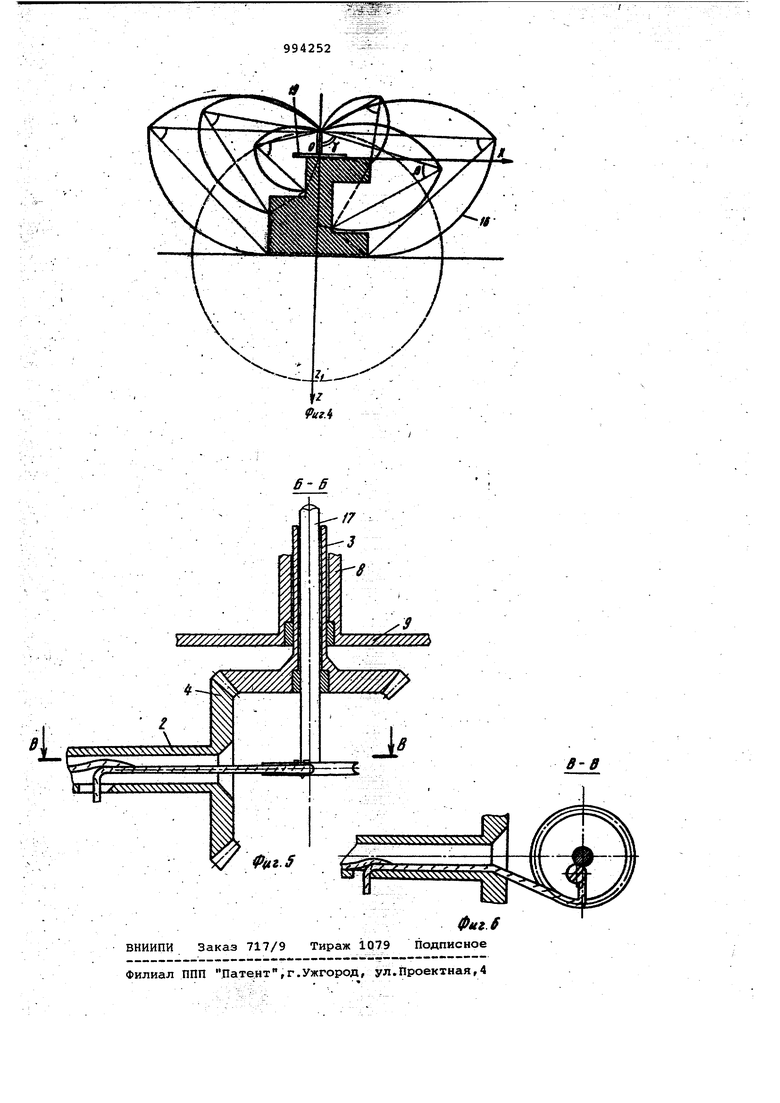
20 изображение Освата в момент распознавания объекта сложной формы; на фиг.5 - разрез Б-Б фиг.2; на фиг.6 разрез В-В фиг.5.
Схват состоит из основания 1, в
25 котором укреплены четыре вала 2,приводимых в движение ведущим полым валом с конической шестерней 3с помощью ведомых конических шестерен ;4. Втулки 5 связаны с валами 2 плос30кими спиральными пружинами 6 и обра
зуют с ними цилиндрические шарниры с ограниченным углом поворота. На каждый вал насажено одинаковое коли% чество. (т) втулок, в данном случае три (т 3) .
Для удержания пальце в в разведенном положении служат гребенчатые стопорные планки 7 с зубцами, которые могут входить в зацепление с пазами на втулках 5. Расстояния между зубцами таковы, что при продольном перемещении стопорной планки приводимой в движение поворотом полого вала 8 с крестовинс5.й 9, первыми выходят из зацепления зубцы 10,удерживающие самые длинные пальцы охвата, и лишь при дальнейшем перемещении -г зубцы, удерживающие остальные, пальцы. Вторые фаланги 11, жестко соединенные с втулками 5, снабжены, как и валы 2, внутренними каналами для тросиков 12. Цапфы 13 связаны с втулками 14 плоскими спиральными пружинами 15 и образуют цилиндрические шарниры с ограниченным углом поворота. С втулками 14 жестко связаны первые фаланги 16 пальцев. Для одновременного натяжения тросиков 12 служит вал со шкивом 17, расположенный сооснр с ведущим полым валом с конической шестерней 3 и полым валом 8. .
Втулки 5 снабжены датчиками угла поворота {) 18, например, резистивного типа. Угол поворота (/ъ) первых фаланг 16 относительно вторых фаланг 11 определяется углом поворота вала со шкивом 17. Свободные концы пальцев и верхний упор 19 снабжены датчиками прикосновения, например контактного типа, причем два из самых длинных пальцев 20 снабжены несколькими датчиками прикосновения и сферическими наконечниками, например, из фторопласта. Остальные самые длинные пальцы 21 снабжены наконечниками плоской формы с резиновыми накладками.
Схват работает следующим образом.
В исходном положении пальцы схвата разогнуты, как показано на фиг.1, и сведены концами к вертикальной оси 02 схвата под действием пружин б и 15. Гребенчатые стопорные планки 7 находятся в переднем положении При повороте ведущего полого вала с кони еской шестерней 3 по часовой стрелке все пальцы разводятся в стороны, пока зубцы планок 7 не попадут в пазы втулок 5 и .не зафиксируют все пальцы (кроме пальцев 20) в разведённом положении. Схват устанавливают так, чтобы верхний упор 19 находился над объектом. Схват опускают вертикально вниз, до тех пор, пока верхний упор не коснется объек,та. По сигналу с датчиков, прикосно1вения верхнего упора движение схвата
вниз прекращается и ведущий полый вал с конической шестерней 3 повора чивается против часовой стрелки в исходное положение, при этом пальцы 20 смыкаются на объекте и поворачивают его относительно схвата. Когда расстояние между концами пальцев 20 перестанет уменьшаться, выдается кО манда на поворот полого вала 8 по часовой стрелке. При этом освобождаются пальцы 21, которые смыкаются на объекте и, благодаря равенству усилий пружин 6, передвигают его так, что геометрический центр объекта .оказывается расположенным на оси 02 схвата или вблизи нее.
Объект может оставаться; неподвижным, тогда перемещаться будет схват. Когда перемещение пальцев 21 прекращается, выдается команда на поворот полого вала 8 по часовой стрелке. При этом освобождаются остальные пальцы схвата. Они смыкаются на объекте, после чего начинается собственно процесс распознавания. Если размер объекта по вертикали- меньше 5 размера 02, как показано на фиг,4, то концы пальцев 20, с1 лкаясь, коснутся поверхности, на кчэторой расположен объект, например, стола. В этом случае подается сигнал на вращение вала со шкивом 17 по часовой стрелке, в результате чего тросики 12 натягиваются и заставляют все пальцы сгибаться в- первых суставах на одинаковый угол fj . По мере сгибания концы пальцев 20 скользят по поверхности стола, пока не сомкнутся на объекте. При изменении направления усилия, действующего на концы пальцев 20, вьщается команда на остановку вращения и фиксацию вала со шкивом 17. Далее схват действует, как было описано выше.
При работе с телами вращения, во избежание их выкатывания из зоны действия схвата, используется измененный алгоритм управления схватом: команда на поворот полого вала 8 по часовой стрелке подается перед командой на поворот ведущего полого вала с конической шестерней 3 против часовой стрелки. В результате пальвдй .20 и 21 сходятся к оси 02 схвата одновременно.
Таким образом, предложенный схват обеспечивает расширение класса распознаваемых объектов за счет предложенного расположения валов и размещения пальцев на валах, что совместно с вновь введенным устройством запирания пальцев обеспечивает также распознавание произвольно ориентированных объектов . Схват обеспечивает расширение диапазона допустимых размерюв объектов, распознаваемых без перенастройки схвата, за счет
вновь введенного в конструкцию схва-i та верхнего упора.
Формула изобретения
0 нетверти кольца, а первые.фаланги выполнены также каждая в виде четверти кольца и снабжены стержнем, расположенным .перпендикулярно плоскости этого кольца и соединенным с шарниром, связывахицим обе фаланги
5 пальца.
Источники информации, принятые во внимание при экспертизе jf. 1. Авторское свидетельство СССР 724337, кл, В 25 J 15/00, 1978.
Фиг.З
A-A
