(54) УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ТЯГОВОГО ЭЛЕКТРОПРИВОДА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования тягового электропривода | 1980 |
|
SU895741A1 |
| Способ регулирования тяговыхэлЕКТРОдВигАТЕлЕй и уСТРОйСТВО дляЕгО ОСущЕСТВлЕНия | 1979 |
|
SU827334A1 |
| Устройство регулирования электропривода | 1977 |
|
SU734031A1 |
| Многодвигательный электропривод | 1979 |
|
SU851720A1 |
| Электропривод постоянного тока | 1983 |
|
SU1117808A1 |
| Реверсивный вентильный электропривод | 1983 |
|
SU1141552A1 |
| УПРАВЛЯЕМЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1994 |
|
RU2088039C1 |
| Устройство регулирования электропривода | 1978 |
|
SU852656A2 |
| Электропривод постоянного тока с двухзонным регулированием скорости валков клети прокатного стана | 1986 |
|
SU1411911A1 |
| Электропривод с двухзонным регулированием скорости | 1989 |
|
SU1765877A1 |
1
Изобретение относится к области автоматического регулирования тяговых электроприводов транспортных средств, преимущественно электроприводов с тяговыми вентильными электродвигателями.
Известно устройство для регулирования тягового электропривода, содержаш,ее соединенные последовательно в кольцевую схему источники питания и якорйые обмотки электродвигателей с вентильными преобразователями 1.
Уменьшение нагрузки какого-либо электродвигателя устройства, вызванное буксованием колеса, приводит к повышению напряжения на его якорной обмотке и соответствуюшему увеличению его частоты вращения. При достаточно крутых внешних характеристиках источников питания это может привести к существенным дополнительным потерям мощности на буксование.
Целью изобретения является повышение точности регулирования.
Цель достигается тем, что устройство, содержащее соединенные последовательно в кольцевую схему источники питания и якорные обмотки электродвигателей с вентильными преобразователями, снабжено по числу электродвигателей блоками сравнения, нелинейными элементами и блоками коррекции. Входы каждого блока сравнения
5 подключены к соответствующим источнику питания и силовому выходу вентильного преобразователя, а выход - к одному из входов нелинейного элемента, другой вход которого подключен к источнику питания,
,Q а выход - к блоку коррекции, соединенному выходом с управляющим входом вентильного преобразователя.
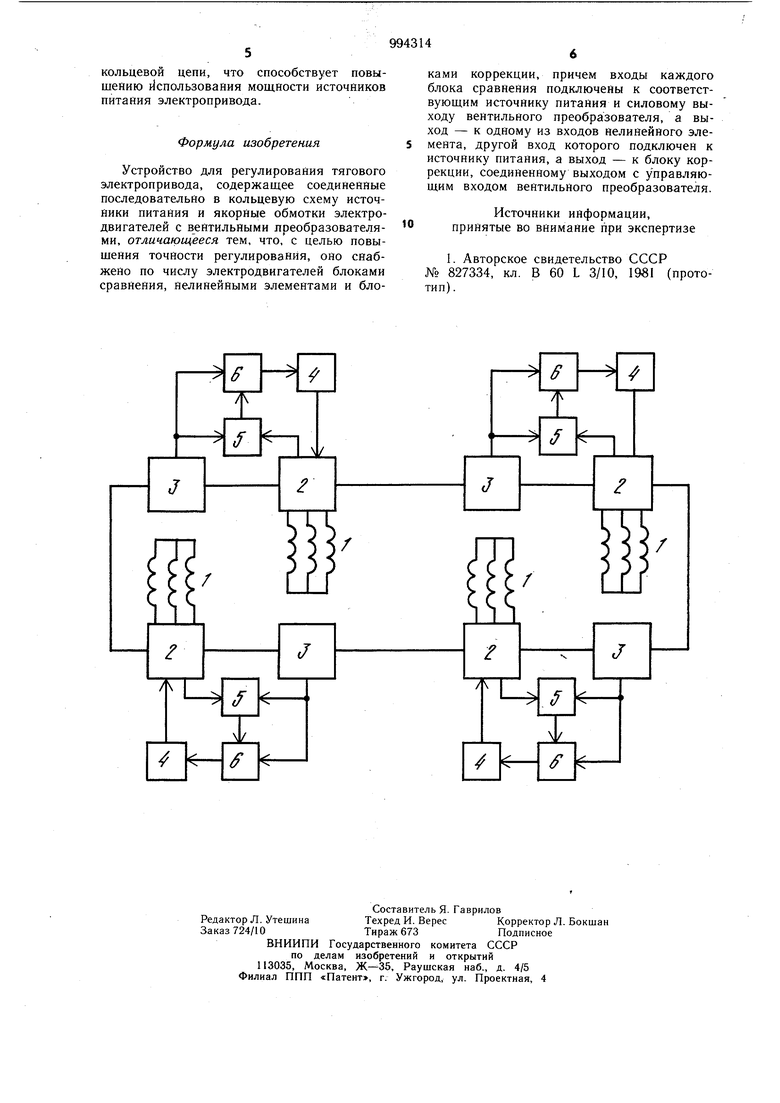
На чертеже представлена структурная схема предлагаемого устройства.
15 Устройство содержит вентильные электродвигатели, якорйые обмотки 1 .которых посредством вентильных преобразователей 2 соединены в одну последовательную цепь с источниками питания 3 по кольцевой схе: ме, блоки коррекции 4, выходы которых
20 соединены с управляющими входами вентильных преобразователей 2, и блоки сравнения 5 напряжений источников питания 3 с напряжениями якорных обмоток 1. Выход каждого блока 5 соединен со входом соответствующего блока коррекции 4 посредством нелинейного элемента 6 с регулируемой зоной нечувствительности, соединенного с соответствующим источником 3.
Устройство работает следующим образом.
При работе электропривода во всех режимах соединение обмоток 1 якорей в одну последовательную цепь по кольцевой схеме обеспечивает идеальное выравнивание их токов. Тяговый момент каждого электродвигателя при этом определяется током в кольцевой цепи и углом опережения сигналов, подаваемых на управляющие входы коммутирующих элементов вентильных преобразователей. Угол опережения задается системой регулирования вентильного преобразователя и блоком коррекции. Изменение режима работы электропривода обеспечивается посредством совместного регулирования напряжения источников 3 по общему закону. Напряжения на элементах кольцевой цепи в общем случае не равны друг другу, их разброс в основном определяется разбросом внешних характеристик источников 3, характеристик электродвигателей и их частот вращения. При небольщих значениях углов опережения, что характерно для реальных режимов работы, напряжения на обмотках 1 якорей незначительно отли1аются от входных напряжений соответствуюидих вентильных преобразователей 2. Поэтому при достаточно большой величине зоны нечувствительности нелинейных элементов 6 и достаточно малых значениях разбросов частот вращения колес транспортного средства сигналы на выходах блоков 5, определяемые разностями напряжений источников питания 3 и напряжений соединенных с ними обмоток 1 якорей электродвигателей, не превыщают величины зоны нечувствительности нелинейных элементов 6. При этом- сигналы на выводах нелинейных элементов б и соответственно на входах блоков коррекции 4 отсутствуют, в результате чего блоки коррекции 4 не воздействуют на управляющие входы преобразователей 2 и подача управляющих сигналов на коммутирующие элементы всех преобразователей 2 осуществляется с одинаковым углом опережения. Равенство токов обмоток 1 якорей всех электродвигателей, а также углов опережения Сигналов, подаваемых на коммутирующие элементы всех преобразователей 2, обеспечивает в этом режиме выравнивание тяговых моментов электродвигателей привода. Это достигается настройкой величины зоны нечувствительности нелинейных элементов 6 таким образом, чтобы при допустимых значениях разброса напряжений на элементах кольцевой цепи выходные сигналы блоков сравнения 5 не превышали напряжений зон нечувствительности нелинейных элементов 6.
Увеличение напряжения источников питания 3 при повышении скорости движения приводит к повыщению разброса напряжений на элементах кольцевой цепи и, следовательно,к повышению сигналов на выходах блоков сравнения 5. Изменение величины зоны нечувствительности нелинейных элементов 6 пропорционально изменению напряжений источников питания 3 способствует поддержанию режима работы
0 преобразователей 2 с одинаковыми углами опережения, несмотря на указанное увеличение разброса напряжений на элементах кольцевой цепи. Такой режим работы привода обеспечивается при движении транспортного средства в условиях достаточного сцепления колес с опорной поверхностью, так как разброс напряжений на элементах кольцевой цепи в этом случае не выходит из допустимых пределов.
При движении в условиях ограниченного
сцепления увеличение частоты вращения какого-либо колеса при его буксовании приводит к повыщению напряжения на обмотке якоря 1 соответствующего электродвигателя. Сигнал на выходе блока 5 при этом также увеличивается. При достижении этим
5 сигналом величины напряжения зоны нечувствительности нелинейного элемента 6 на выходе последнего появляется сигнал, который, воздействуя на вход блока коррекции 4, приводит к увеличению углов опережения
д, управляющих сигналов, подаваемых на коммутирующие элементы соответствующего преобразователя 2. Тяговый момент на валу соответствующего электродвигателя при этом уменьшается, что способствует ограничению буксования указанного колеса.
5 При достаточно высокой чувствительности рассмотренного канала регулирования установившийся режим может быть обеспечен при практически постоянном значении частоты вращения колеса в широком диапазоне изменения условий его сцепления.
° При восстановлении условий сцепления указанного колеса момент сопротивления на нем увеличивпется, частота вращения и соответственно сигналы на выходах блока 5 уменьщаются, что приводит к умень5 щению угла опережения сигналов, подаваемых на управляющие выводы коммутирующих элементов соответствующего преобразователя 2 и к повышению тягового момента соответствующего электродвигателя. Схема приходит в исходное состояние.
Предлагаемое устройство позволит по сравнению с известным за счет повышения точности регулирования повысить КПД привода при движении транспортного средства в условиях ограниченного сцепления из-за уменьшения потерь на пробуксовку колес. Кроме того, в устройстве источник питания, соединенный с якорной обмоткой буксующего электродвигателя, не исключается из
кольцевой цепи, что способствует повышению использования мощности источников питания электропривода.
Формула изобретения
Устройство для регулирования тягового электропривода, содержащее соединенные последовательно в кольцевую схему источники питания и якорные обмотки электродвигателей с вентильными преобразователями, отличающееся тем, что, с целью повышения точности регулирования, оно снабжено по числу электродвигателей блоками сравнения, нелинейными элементами и блоками коррекции, причем входы каждого блока сравнения подключены к соответствующим источнику питания и силовому выходу вентильного преобразователя, а выход - к одному из входов нелинейного элемента, другой вход которого подключен к источнику питания, а выход - к блоку коррекции, соединенному выходом с управляющим входом вентильного преобразователя.
Источники информации, принятые во внимание при экспертизе
