(5) ДАТЧИК ПЕРЕМЕЩЕНИЙ (ЕГО ВАРИАНТЫ)
1
Изобретение относится к контрольно измерительной технике и может найти применение в устройствах измерения перемещений подвижных узлов станков, измерительных машин и приборов.
Известны датчики перемещений, содержащие два относительно подвижных элемента с печатными обмотками, например датчик типа индуктосин 1 .
Одним из недостатков датчиков такого типа является погрешность, обусловленная наличием высших пространственных гармоник поля, например, изза неточности выполнения обмоток.
Наиболее близким по технической сущности к данному изобретению является датчик перемещений, содержащий два относительно подвижных элемента и размещенную на одном из них печатную обмотку с шагом Т. В этом датчике ширина проводников обмотки постоянна и выполнена равной Т/п, где п номер устраняемой нечетной пространственной гармоники поля. Таким образом, за счет выбора конкретной ширины проводника обмотки происходит уст ранение одной из нечетных высших пространственных гармоник поля 2}.
Недостатком такой конструкции является неполное устранение подавляемой гармоники из-за неточности выполнения проводников обмотки и возможность устранения только одной нечетной гармоники поля.
Целью изобретения является уменьшение погрешности датчика от влияния п-й пространственной гармоники поля, а также одновременное уменьшение погрешности датчика от влияния какихлибо двух нечетных пространственных гармоник поля.
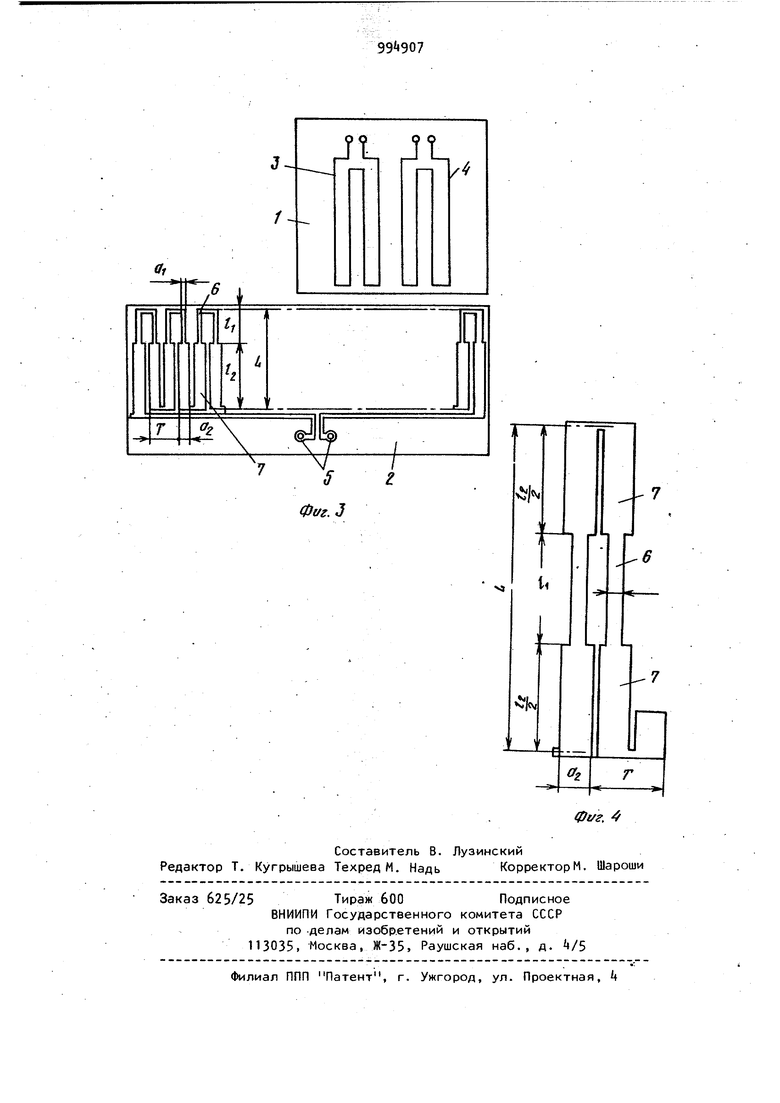
Поставленная цель достигается тем, что в датчике перемещений по первому варианту проводники обмотки выполне-. ны в виде двух последовательно соединенных участков одинаковой длины и ширины, смещенных один относительно другого вдоль поверхности элемента на величину, равную , где , 3 4....- номер пространственной гармоники. В датчике перемещений по второму варианту проводники выполнены в виде двух последовательно соединенных учас тков разной длины и ширины, соотношение которых определяется из формулы 7(С1„Ti 2 а. Sin п„ где B и o длина первого и второго участков соответственно и аг) ширина первого и второго участков соответственно;номера устраняемых высших нечетных пространственных гармоник поля. На фиг. 1 изображена конструкция первого варианта датчика перемещений на фиг. 2 - вариант исполнения участков проводников его печатной обмотки на фиг. 3 - конструкция второго вари анта датчика перемещений; на фиг. k вариант исполнения участков проводников его обмотки. Датчик перемещений содержит два относительно подвижных элемента: головку 1 и шкалу 2, на которых размещены соответственно синусная обмотка 3, косинусная обмотка k и индуктивно связанная с ними обмотка 5 шкалы 2. Проводники обмотки 5 расположены с шагом Т и выполнены в виде двух последовательно соединенных участков 6 и 7 имеющих соответственно длину х, и 2 и ширину а, а2 В первом варианте датчика эти участки смещены один относительно другого по длине шкалы 2 на величину и имеют одинаковую ширину а,. В варианте исполнения проводников обмотки один из участков, например 6, может быть выполнен в виде двух половин, между ко.торыми включен другой участок, например 7 что позволяет уменьшить влияние от переносов о&мотки (фиг. 2и). Датчик перемещения работает следу. ющим образом. При питании обмоток 3 и it синусоидальными токами, смещенными на J/2, в обмотке -5 наводится ЭДС. Ее величина зависит от суммы взаимных индуктивностей между отдельными участками 6 и 7 проводников и обмоток 3 и k. торые могут быть представлены в слеющем виде - ,ЛпсЗ 2Jfnx -ijp-С05 -j.1 J/nd . 2ЛПХ fb cos-p-sin- pе - 2ЕЛпй 2Ж A, tM Т„С05- г-31П 4,b 4Л ТТ 2Jrnx . , COS- гг-cos:рI (2.) З.Ь Э,7 взаимные индуктивности обмотки 3 и участков 6 и 7 проводников обмотки 5; М. , и М. ., взаимные индуктивнос4,Ь 4,Т ти обмотки k и участков 6 и 7 проводников обмотки 5; величина смещения осей проводника, представленного двумя участками (по первому варианту датчика); длины активных участков 6 и 7 проводников;ширина активных участков 6 и 7 проводников; номер гармоники; величина относительного перемещения элементов 1 и 2 ; , cf - постоянные коэффициенты при п-х гармониках, причем oi 2ri шаг обмотки шкалы. чевидно, что при и одивой ширине о участков проводников ение при любом конкретном 3 ... приводит к равенству нулю ветствующей гармоники как четной, нечетной во взаимных индуктивях, описываемых уравнением (2), кже равенство нулю погрешности ика перемещений, обусловленной пространственной гармоникой поПри этом величина первой гармониДС, наводимой в обмотке 5 и являся, полезным сигналом датчика, опляется как гК-д-Зш1, cos-g sinCwt -j-} (3) J и U) - соответственно амплитуда и круговая частота тока питания; 5f59 t - время; К - коэффициент пропорциональности. Равенство (З) показывает, что величина полезного сигнала ЭДС датчика перемещений уменьшается при увеличении номера подавляемой гармоники, но не меньше величины полезного сигнала датчиков, использующих подавление
высших пространственных гармоник поля онении, а также с элементами, содержапри помощи выбора ширины проводников,щими зубчатую шкалу без обмоток, как это осуществлено в известном тех- Таким образом, предлагаемая кЬнстническом решении.рукция обмоток датчика перемещений с
Во втором варианте исполнения дат- разбиением проводников на отдельные
чика перемещений происходит устране- isучастки и наличием смещения между
ние только нечетных гармонических со-осями обоих участков позволяет уменьставляющих поля, поэтому выражение (2) может быть записано как
, ,э л па г лп q ,J.s,-n-p 2 00 n+3 2- . 2Л . (-1) V 4,1 f,3 /Е JTpo, е . пс, l -T -T Приравняв выражение в скобках нулю, получаем условия, при кото происходит одновременное уменьше погрешности от влияния каких-либ двух высших нечетных пространств гармоник поля, т. е. Система .уравнений (5) решаетс фическим.или численным методом, которых определяются области сущ вования а и 2Например, при подавлении трет и пятой гармоник ( ) об Эп определяют существования а- и ,g-i , т . Т
шить погрешность датчика оТ влияния высших гармонических пространственных составляющих поля.
20 07 Выбрав значение а, определяют отношение ., после чего графическим методом или методом последовательных приближений определяют величину a«. Необходимо OTMetHTb, что предлагаемая конструкция проводников может быть выполнена как на головке 1, так и на шкале 2. Сам датчик перемещений может быть выполнен в круговом ислол-. Формула изобретения 1.Датчик перемещений, содержащий два относительно подвижных элемента и размещенную на одном из них печатную обмотку с шагом Т, отличающийся тем, что, с целью уменьшения погрешности датчика от влияния п-й пространственной гармоники поля, проводники обмотки выполнены в виде двух последовательно соединенных участков одинаковой длины и ширины, смещенных один относительно другого вдоль поверхности элемента на величину в Т/2 п, где г 2, 3, номер пространственной гармоники. 2.Датчик перемещений, содержащий два относительно подвижных элемента и размещенную на одном из них печатную обмотку с шагом Т, о т л и ч а ющ и и с я тем, что, с целью одновременного уменьшения погрешности датчика от влияния каких-либо двух нечетных пространственных гармоник поля, проводники обмотки выполнены в виде двух последовательно соединенных участков разной длины и ширины, соотношение которых определяется из формулы -. g, q si-nn -yd SiB п Р Ли2 п п, giw... .- - J -2.Ч т и - длина первого и второго где . участков соответственно и ал - ширина первого и второго участков соответственно; .
7 .99 9078
П-, и n номера высших нечетных 1. Патент США № 2650352, пространственных гармо- кл. 336-123, 1953ник поля.
Источники информации,2. Патент США № 2799835,
принятые во внимание при экспертизе s - 336-123, 1957 (прототип)
.
А 

| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик перемещений | 1982 |
|
SU1019218A1 |
| Датчик перемещений - индуктокор | 1976 |
|
SU817739A1 |
| Датчик перемещений | 1979 |
|
SU848985A1 |
| Преобразователь перемещений | 1979 |
|
SU800610A1 |
| Синусно-косинусный датчик угла | 1976 |
|
SU652658A1 |
| Вентильный электродвигатель | 1982 |
|
SU1062829A1 |
| Датчик перемещений | 1978 |
|
SU817893A1 |
| Индуктосин | 1983 |
|
SU1136266A1 |
| Датчик положения - многоотсчетныйиНдуКТОКОР | 1977 |
|
SU817892A1 |
| МНОГОХОДОВАЯ ПЕТЛЕВАЯ ОБМОТКА ЯКОРЯ ДЛЯ БЕСПАЗОВЫХ МАШИН ПОСТОЯННОГО ТОКА | 1994 |
|
RU2122270C1 |
ff
2
2
г
Фу.г
/ /
