(54) ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ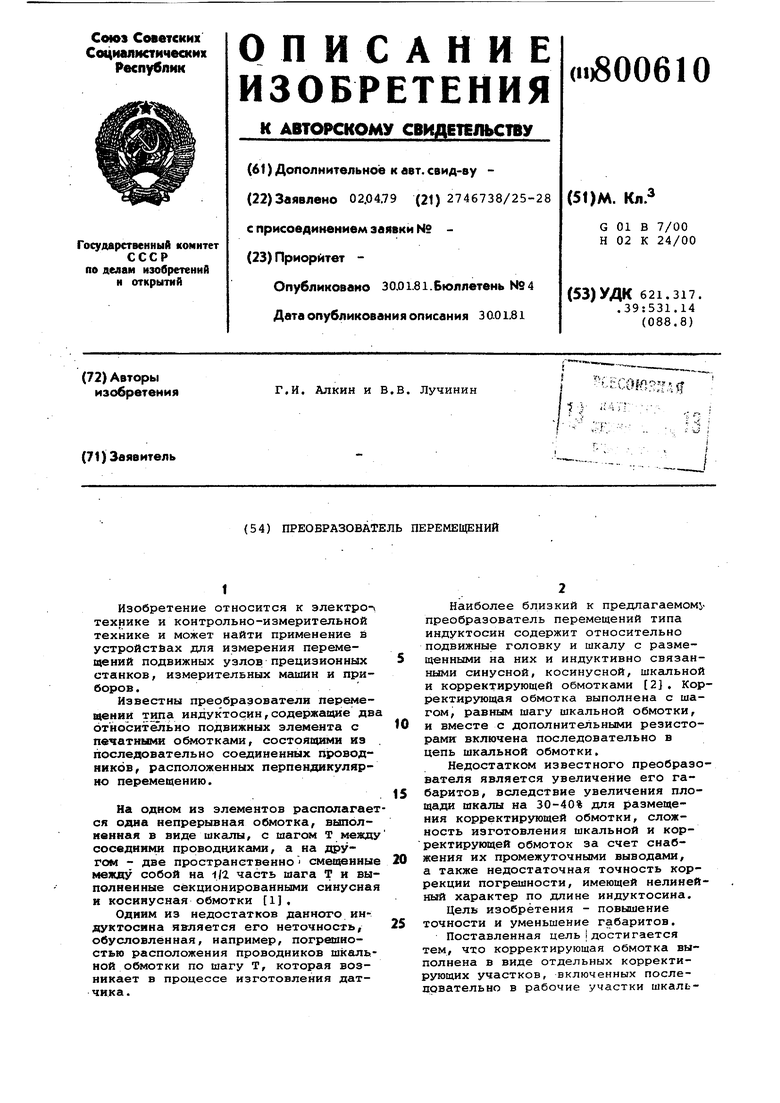
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик перемещений | 1979 |
|
SU848985A1 |
| Датчик перемещений | 1982 |
|
SU1019218A1 |
| Датчик перемещений (его варианты) | 1980 |
|
SU994907A1 |
| Индуктосин | 1983 |
|
SU1136266A1 |
| Датчик перемещений - индуктокор | 1976 |
|
SU817739A1 |
| Преобразователь перемещений | 1978 |
|
SU763670A1 |
| ШКАЛА АБСОЛЮТНЫХ ЗНАЧЕНИЙ И СПОСОБ РАСЧЕТА АБСОЛЮТНЫХ ЗНАЧЕНИЙ | 2008 |
|
RU2382336C2 |
| Датчик перемещений | 1978 |
|
SU817893A1 |
| Преобразователь относительного перемещения узлов станка | 1978 |
|
SU744218A1 |
| Датчик положения - многоотсчетныйиНдуКТОКОР | 1977 |
|
SU817892A1 |
1
Изобретение относится к электротехнике и контрольно-измерительной технике и может найти применение в устройстйах для измерения перемещений подвижных узлов прецизионных станков, измерительных машин и приборов.
Известны преобразователи перемещении THjia индуктосин, содержап 1е дв относительно подвижных элемента с печатными обмотками, состоя1цими из последовательно соединенных проводников, расположенных перпендикулярно перемещению.
На одном из элементов располагается одна непрерывная обмотка, выполненная в виде шкалы, с шагом Т между соседними проводилками, а на другом - две пространственно смещенные между собой на |Л часть шага Т и выполненные секционированными синусная и косинусная обмотки 1,
Одним из недостатков данного индуктосина является его неточность, обусловленная, например, погрешностью расположения проводников шкальной обмотки по шагу Т, которая возникает в процессе изготовления датчи.ка.
Наиболее близкий к предлагаемому преобразователь перемещений типа индуктосин содержит относительно подвижные головку и шкалу с разме5 щенными на них и индуктивно связанными синусной, косинусной, шкальной и корректирующей обмотками 2. Корректирующая обмотка выполнена с шагом, равным шагу шкальной обмотки, 0 и вместе с дополнительными резисторами включена последовательно в цепь шкальной обмотки.
Недостатком известного преобразователя является увеличение его га5 баритов, вследствие увеличения площади шкалы на 30-40% для размещения корректирующей обмотки, сложность изготовления шкальной и корректирующей обмоток за счет снабжения их промежуточными выводами, а также недостаточная точность коррекции погрешности, имеющей нелинейный характер по длине индуктосина.
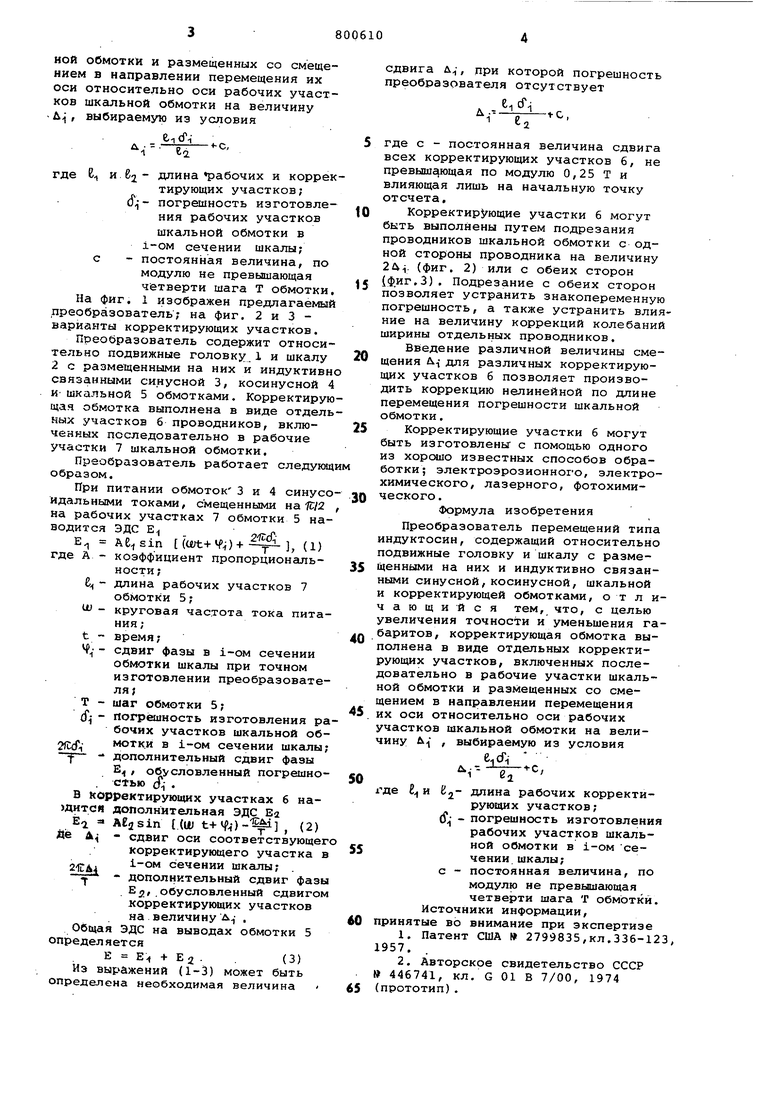
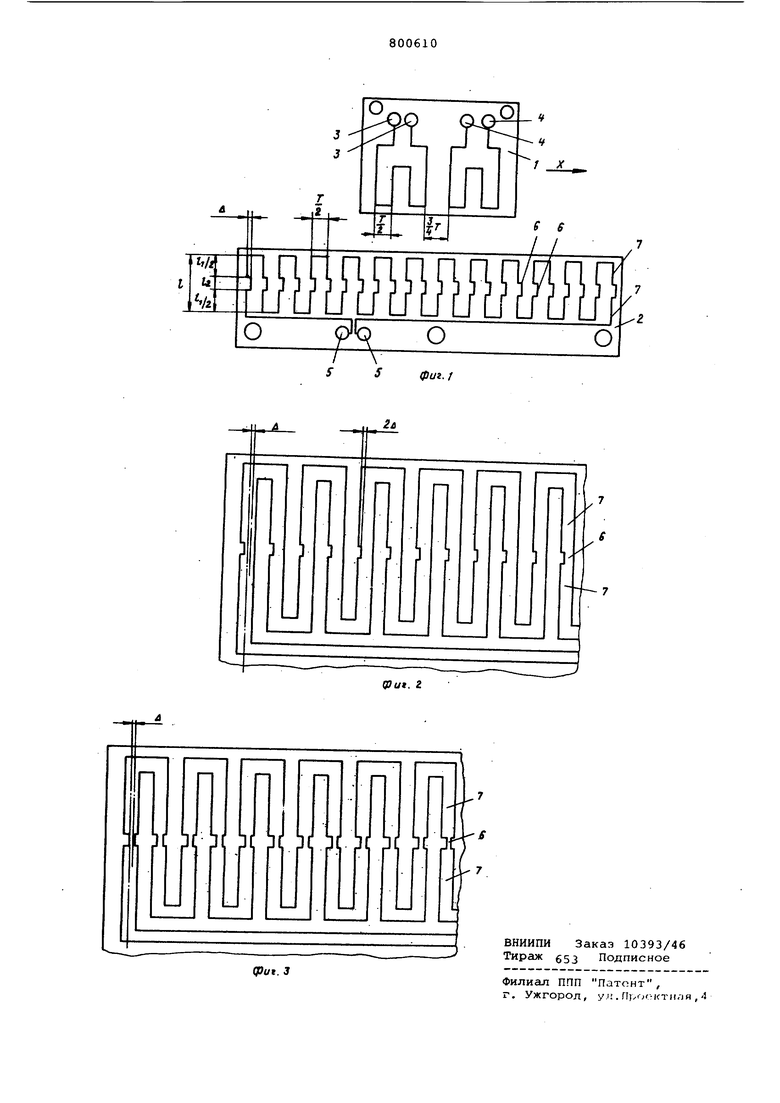
Цель изобретения - повышение 5 точности и уменьшение габаритов. Поставленная цельjдостигается тем, что корректирующая обмотка выполнена в виде отдельных корректирующих участков, включенных последовательно в рабочие участки шкальиой обмотки и размещенных со смещением в направлении перемещения их оси относительно оси рабочих участков шкёшьной обмотки на величину , выбираемую из условия где К и.2 длина «рабочих и коррек тирующих участков; (f - погрешность изготовления рабочих участков шкальной обмотки в i-OM сечении шкалы; с - постоянная величина, по модулю не превышающая четверти шага Т обмотки На фиг. 1 изображен предлагаемый преобразователь; на фиг. 2 и 3 варианты корректирующих участков. Преобразователь содержит относи тельно подвижные головку.1 и шкалу 2 с размещенными на них и индуктивн связанными синусной 3, косинусной и-шкальной 5 обмотками. Корректирую щая обмотка выполнена в виде отдел ных участков б проводников, включенных последовательно в рабочие участки 7 шкальной обмотки. Преобразователь работает следукл образом. При питании обмоток 3 и 4 синус идальными токами, смещенными на 7C/2 на рабочих участках 7 обмотки 5 на водится ЭДС Е (oyt+4), (1) где А - коэффициент пропорциональности;. - длина рабочих участков 7 обМотки 5; А - круговая частота тока пита ния ; t время; - сдвиг фазы в i-oM сечении обмотки шкалы при точном изготовлении преобразовате ля; Т - шаг обмотки 5; (fj - погрешность изготовления р бочих участков шкальной об 2{uf мотк.И в i-OM сечении шкалы - дополнительный сдвиг фазы Е, обусловленный погрешно . СТЬЮ сЯ; . В корректирующих участках 6 на)дитси дополнительная ЭДС Еа EI . l(W t+)- , (2) сдвиг оси соответствующе корректирующего участка i-OM сечении шкалы; дополнительный сдвиг фаз . Еу, обусловленный сдвиго корректирующих участков на величину . Общая ЭДС на выводах обмотки 5 определяется Е Е + Е2 - . (3) Из выр ажений (1-3) может быть определена необходимая величина сдвига , при которой погрешность преобразователя отсутствует где с - постоянная величина сдвига всех корректирующих участков 6, не превышающая по модулю 0,25 Т и влияющая лишь на начальную точку отсчета. Корректирующие участки 6 могут быть выполнены путем подрезания проводников шкальной обмотки с одной стороны проводника на величину 21. (фиг. 2) или с обеих сторон (фиг.З). Подрезание с обеих сторон позволяет устранить знакопеременную погрешность, а также устранить влияние на величину коррекций колебаний ширины отдельных проводников. Введение различной величины смещения Д. для различных корректирующих участков б позволяет производить коррекцию нелинейной по длине перемещения погрешности шкальной обмотки. Корректирующие участки б могут быть изготовлены с помощью одного из хорошо известных способов обработки; электроэрозионного, электрохимического, лазерного, фотохимического . Формула изобретения Преобразователь перемещений типа индуктосин, содержащий относительно подвижные головку и шкалу с размещенными на них и индуктивно связанными синусной,косинусной, шкальной и корректирующей обмотками, от л ичающийся тем, что, с целью увеличения точности и уменьшения габаритов, корректирующая обмотка выполнена в виде отдельных корректирующих участков, включенных последовательно в рабочие участки шкальной обмотки и размещенных со смещением в направлении перемещения их оси относительно оси рабочих участков шкальной обмотки на величину Л{ , выбираемую из условия --где и Kj- длина рабочих корректирующих участков; - погрешность изготовления рабочих участков шкальной обмотки в i-OM сечении шкгшы; с - постоянная величина, по модулю не превышсшщая четверти шага Т обмоткИ. Источники информации, принятые во внимание при экспертизе 1.Патент США № 2799835,кл,336-123, 1957, 2.Авторское свидетельство СССР 446741, кл, G 01 В 7/00, 1974 (прототип).
