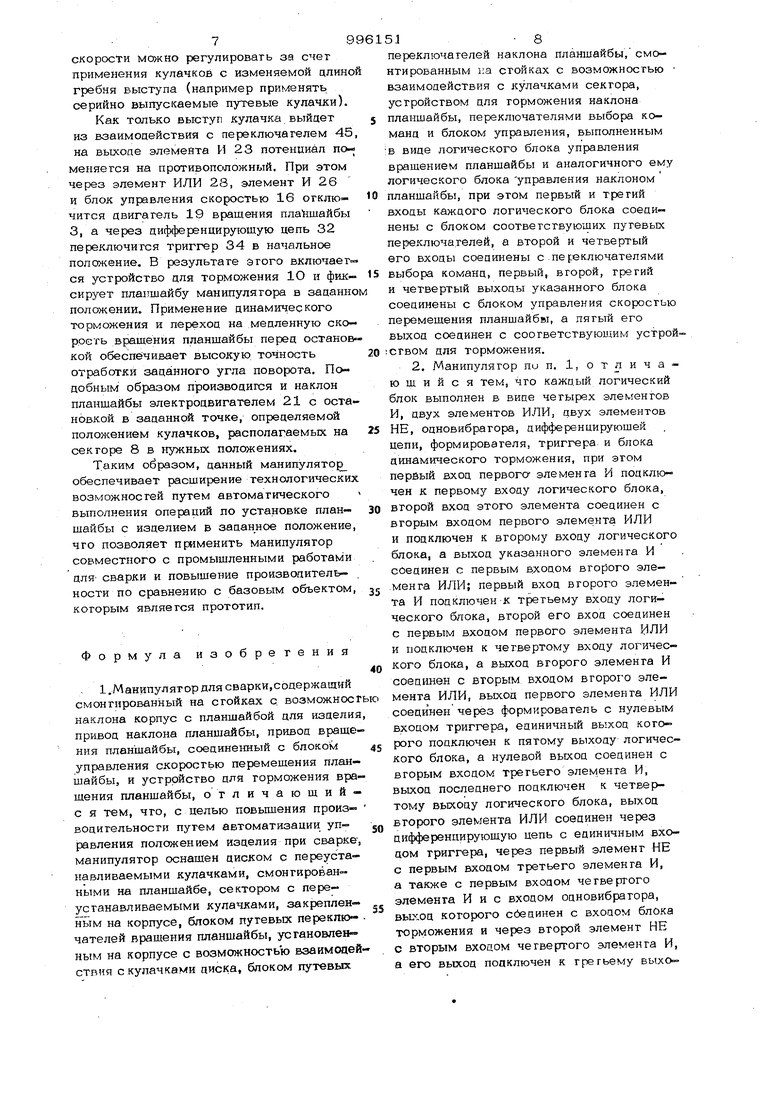
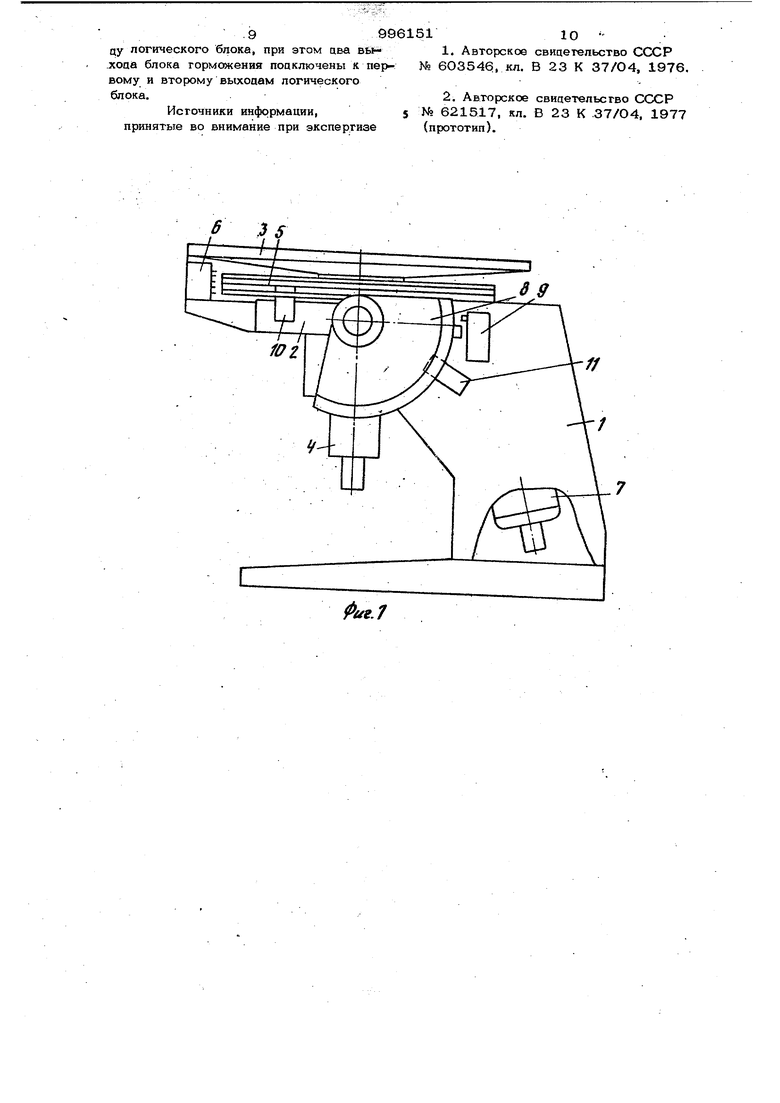
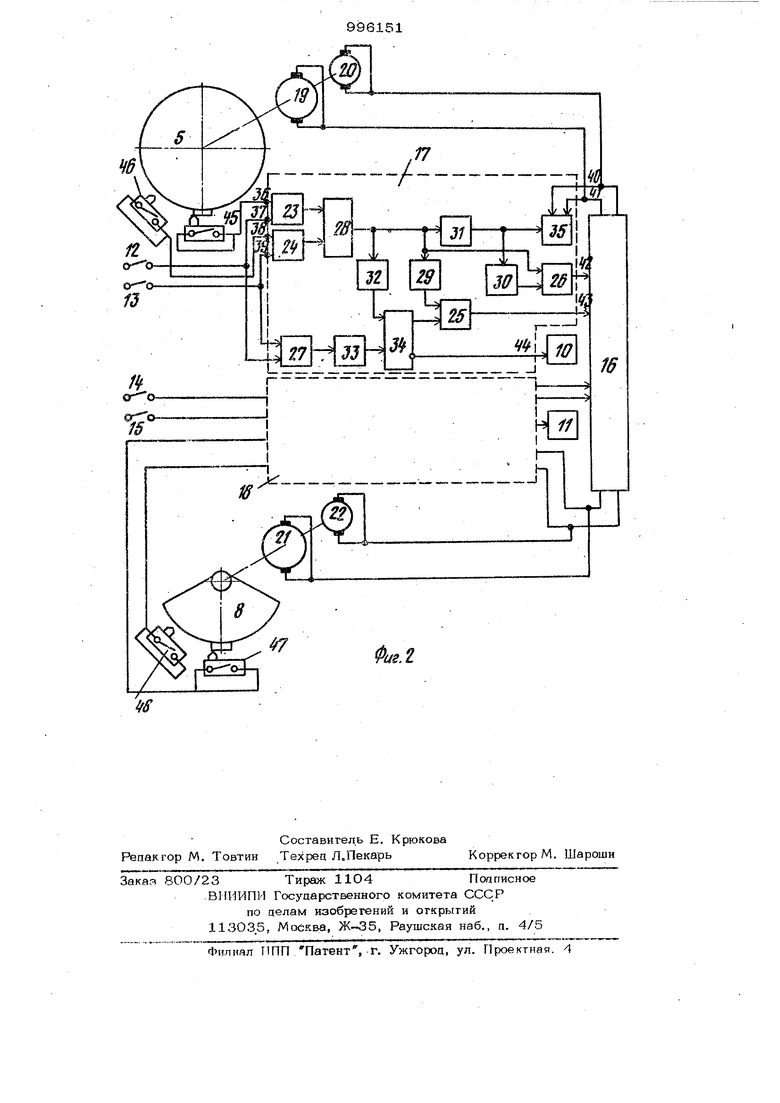
Изобретение относится к срецст1вам механизации и авгомагизации сварочного произвоаства, а именно к оборудованию для вращения, наклона и фиксации иаае- ЛИЙ в требуемом для сварки положении. Известен манипулятор для установки изделий в положение, удобное йля сварки и вращения их со сварочной скоростью при автомагической электродутовой сва ке круговых швов,, содервкаший станину, поворотную планщвйбу, шпиндель, привод вращения планшайбы и тормозное устрой ство, взаимопействуюцее со шпинделем планшайбы 11Данный манипулятор не обеспечивает управления направлением вращения и наклона планшайбы и управления скоростью наклона планшайбы, что сужает его техно логические возможности манипулятора и не позволяет использовать его при сварке изделия;по программе. Наиболее близким по технической сущности и цостигаемому результату является манипулятор для сварки, содержа- щий смонтированный на стойках с возможностью наклона корпус с планшайбой для изделия, привод наклона планшайбы, привод вращения планшайбы, соединенный с блоком управления скоростью перемещения планшайбы и устройство для торможения вращения планшайбы C2l . Однако этот манипулятор обеспечивает лишь регулирование скорости вращения планшайбы и управление направлением ее вращения и наклона, но не позволяет регулировать скорость наклона планшайбы и управлять положением издеглия в процессе сварки в автоматическом режиме по , определенной программе. Целью изобретения является повышение производительности и технопогтеских возможностей путем автоматизации управления положением изделия при сварке. Цель постигается тем, что манипулятор для сварки, содеркаший смонтированный на стойках с возмонсностью наклона корпус с планшайбой аля изаелня, прнвоц наклона планшайбы, привод вращения планшайбы. соециненный с блоком управления скоросгью .перемещения планшайбы и устройство для торможения вращения планшайбы, оснащен диском с переустанавливаемыми кулачками, смонтированным на планшайбе, сектором с переустанавливаемыми кулачками, закрепленным на корпусе, блоком путевых переключателей вращения планшайБы, установленным на корпусе с возможностью всзаимодействия с кулачками диска, блоком путевых переключателей наклона планшайбы, смонтированным на стойках с возможностью взаимодействия с кулачками сектора, устройством, для торможения наклона планшайбы, переключателями выбора команд и блоксм управления, выполенным в виде логического блока управ ления вращением планшайбы и аналогичHOi o ему блока управления наклоном планшайбы, при этом первый и третий входы каждого, логического блока соединены с блоком соответствующих путевых переключателей, а второй и четвертый его входы соединены с переключателями выбора команд, первый, второй, третий и четвертый выходы указанного блоках соединены с блоком управления скоростью перемещения планщайбы, а пятый его выход соединен с соответствующим устро ством для торможения. Каждый логический блок выполнен в ; вице четырех элементов И, двух элемен тов или, двух элементов НЕ, одновибратора, дифференцирующей цепи, формировател(,триггера и блока динамического торможения, при этом первь1й вход первого элемента И подключен к. первому входу логического блока, второй вход этого элемента соединен со вторым входом пер вого элемента ИЛИ и подключен ко второ му входу логического блока, а выход указанного элемента И соединен.с пер вым входом второго элемента И подключе к третьему входу логического блока} второй его вход соединен с первым входом первого элемента ИЛИ и попключен к чет вертому входу логического блока, а выхо второго элемента И соединен со вторым входом второго элемента ИЛИ, выход первого элемента ИЛИ соединен через формирователь с нулевым входом триггер единичный выход которого подключен к пятому выходу погЕРШского блока, а нулевой выход соединен со вторым входом третьего элемента И, выход последнего подключен к четвертому выходу логического блока, выход второго элемента ИЛИ соединен через дифференцирукэшую цепь с едитгчныи входом триггера, через перВЫЙ элемент НЕ с первым входом третьего элемента И, а также с первым входом четвертого элемента И и с входом одновибратора, выход которого соединен со входом блока торможения и через второй элемент НЕ со вторым входом четвертого элемента И, а его выход подклвэчен к третьему выходу логического блока, при этом два выхода блока торможения подключены к первому и второму выходам логического блока, «На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - схема управления манипулятором. Манипулятор содержит стойки 1, в которых щарнирно закреплен корпус 2 с планщайбой 3 и приводом 4 вращения планшайбы. Соосно с планшайбой смонтирован диск 5 с направляющими для размещения кулачков, взаимодействующих с блоком 6 путевых переключателей вращения планшайбы, установленным на корпусе 2. На стойках 1 расположен привод 7 наклона планшайбы, а на оси наклона корпуса закреплен сектор 8 с направляющими для кулачков, взаимодействующих с блоком 9 путевых переключателей наклона планшайбы. Каждый блок может содержать 4, 6 и 8 или 10 переключателей (микропереключателей). Выбор типа блока переключателей зависит от объема технологических команд и количества требуемых по технологии положений планшайбы манипулятора (на фиг. 2 показано по два микропереключателя, в блоках вращения и наклона планшайбы). Устройство для торможения 1О врашения планшайбы и 11 наклона планшайбы закреплены соответственно на корпусе 2 и стойках 1. Манипулятор содержит переключатели 12 - 15 выбора технологических команд, блок управления скоростью 16 перемещения планшайбы и блок управления, содержащий два идентичных логических блока 17 и 18, управления соответственно вращением и наклоном планщайбы. На фиг, 2 показано по два переключателя Выбора технологических команд для вращения и наклона планшайбы. Количество переключателей зависит от объема технологических операций, выполняемых манипулятором. Планшайбу 3 оовмесгно с диском 5 приводит во вращение привод 4, электродвигатель 19 которого соед1шен с тахогенератором 20. Аналоги отый по коисгрук. ции привоа 7 наклона планшайбы соцеркси электроавигагель .21 и тахогенератор 22. Приводы вращения и наклона планшайбы соединены с блоком управления скооостью 16. Блоки 17 и 18 содержат четыре элемента И 23 - 26 два элемента ИЛИ 27 и 28, два элемента НЕ - 29 и ЗО, одновибрагор 31, дифференцирующую цепь 32, формирователь 33, триггер 34 и блок динамического торможения 35. Входы логического блока обозначены позициями 36 - 39 а выходы позициями 4О - 44. Контакты переключателей блока 6 обозначены позициями 45 и 46 j а контакты переключателей блока 9 позициями 47 и 48. Контакты 45 путевого переключателя блока 6 подключены К первому входу 36 .логического блока 17, контакты 46 подключены -к третьему входу 38 этого блока, переключатели 12 и 13 - соответ ственно ко второму и четвертому входам блока 17. . . Контакты 47 и 48 переключателей блока 9 и переключатели 14 и 15 подключены к аналогичным входам блока 18 Первый вход элемента И 23 подключен к первому входу.36 блока, а второй его вход соединен со вторым входом первого элемента ИЛИ 27 и подключен ко втором входу 27. Первый вход второго элемента И 24 подключен к третьему входу 38 блока, а второй его вход соединен с первым входом элемента ИЛИ 27 и подключен к четвертому входу 39 блока. Выходы первого и второго элементов И 23 к 24 соединены с первым и вторым соответственно входами второго элемента ИЛИ 28. Выход элемента ИЛИ 2.7 чере.з формирователь 33 соединен с нулевым входом триггера 34, единичный выход которого соединен с. пятым выходом 44 блока, к которому подключено устройство для торможения 10. Выход второго элемента ИЛИ 28 соединен с первым входом четвертого элеме та И 26, через дифференцирующую цепь 32 с единичным входом триггера 34, через первый элемент НЕ 29 со входом третьего элемента И 25, а также с входом одновибратора 31, выход которого соединен с блоком динамического тортложения 35 и через второй элемент НЕ 30 со вторым входом четвертого элемента И 26, нулевой выход триггера 34 соецинен со вторым входом элемента И 2;5. Два выхоаа блока тормсвкения 35 подключены к первому 40 и второму 41 выходам логического блока, выход четвертого элемента И 26 подключен к третьему выходу логического блока, выход третьего элемента И 25 подключен к четвертому выходу указанног;о блока. Блок управления 16 скоростью пере- меивния планшайбы подключен к 4О - 43 выходам логического блока., Манипулятор работает следующим образом. С помощью переключателей выбора технологических команд задается режим движения планшайбы: например включание переключателя 12 обеспечивает вращш1ие планшайбы со скоростью, заданной в блоке управления до тех пор, пока не включится переключатель 45, включение переключателя 14 обеспечивает наклон планшайбы цо тех пор, пока не включится переключатель 47 и т.д. При включении переключателя 12 сигнал подается на второй вход элемента ИЛИ 27 и через формирователь 33 поступает на нелевой вход триггера 34, который отключает устройство для торможения 10 и через третий элемент И 25 подает сигнал на блок управления скоростью 16. Последний обеспечивает вращение Ш1аншай(бы через элект.родвигатель 19, до тех пор, пока кулачок, расположенный в направляю11,их диска 5, не включит своей передней кромкой выстут переключатель 45. Кулачок расположен в напреш- ляюших диска таким образом, чтобы положение задней кромки выступа соответствовало заданной точке остановки планшайбы. Сигнал от переключателя 45 через первый элемент И 23 и элемент ИЛИ 28 поступает через элемент НЕ 29 на первый вход элемента И 25, который отключит вход блока управления скорости. Одновременно включается оцновибратор 31, который включит блок 35 динамического торможения двигателя 19. По окончании импульса динамического торможения, длительность когорого определяется длительностью импульса одновибратора, сигнал разрешения через элемент НЕ ЗО поступает на второй вход элемента И 26, который включит с помощью блока управления скоростью 16 пониженную скорость вращения двигателя 19. Враивние планшайбы на медленной скорости, выполняется до тех пор, пока выступ кулачка не выйдет из взаимодействия с толкателем переключателя 45 и |аким образом, разомкнет его контакты. Величину хода планшайбы на медленной скорости можно регулировать за счет применения кулачков с изменяемой длино гребня выступа (например применять серийно выпускаемые путевые кулачки). Как только выступ кулачка выйдет из взаимодействия с переключателем 45 на выходе элемента И 23 потенциал поменяется на противоположный. При этом через элемент ИЛИ 28, элемент И 26 и блок управления скоростью 16 отключится двигатель 19 вращения пла 1шайбы 3, а через дифференцирующую цепь 32 переключится триггер 34 в начальное положение. В результате этого включает ся устройство для торможения 1О и фик- 5 сирует планшайбу манипулятора в заданном положении. Применение динамического торможения и переход на медленную скорость вращения планщайбы перец останов кой обеспечивает высокую точность отработки заданного угла поворота. Подобным образом произвоцитоя и наклон планщайбы электродвигателем 21 с оста новкой в заданной точке, определяемой положением кулачков, располагаемых на секторе 8 в нужных положениях. Таким образом, данный манипулятоц обеспечивает расширение технологических возможностей путем автоматического выполнения операций по установке план- щайбы с изделием в заданное положение, что позволяет применить манипулятор совместного с промышленными работами ДЛЯ сварки и повышение производительности по сравнению с базовым объектом, которым является прототип. Формула изобретения , 1,Манипулятор для сварки,содержащий смонтированный на стойках c возможносг наклона корпус с планшайбой для изделия привод наклона планшайбы, привод враще ния планигайбы, соединенный с блоком управления скоростью перемещения планшайбы, и устройство для торможения вра щения планщайбы, отличающий - с я тем, что, с целью повьшаения производительности путем автоматизации управления положением изделия при сварке манипулятор оснашен диском с переустанавливаемыми кулачками, смонтированными на планшайбе, сектором с переустанавливаемыми кулачками, закреплен- ным на корпусе, блоком путевых перекпючателей врашения планшайбы, усгановленн ным на корпусе с возможностью взаимодей ствия с кулачками диска, блоком путевых 9 51 8 переключателей наклона планшайбы, смонтированным иа стойках с возможностью взаимодействия с кулачками сектора, устройством для торможения наклона планшайбы, переключателями выбора команд и блоком управления, выполненным в виде логического блока управления вращением планщайбы и аналогичного ему логического блока управления наклоном планщайбы, при этом первый и третий входы каждого логического блока соединены с блоком соответствующих путевых переключателей, а второй и четвертый его входы соединены с .переключателями выбора команд, первый, второй, третий и четвертый выходы указанного блока соединены с блоком управления скоростью перемещения планшайбы, а пятый его выход соединен с соответствующим устройiCTBOM для торможения. 2. Манипулятор пи п. 1, отличающийся тем, что каждый логический блок выполнен в вице четырех элементов И, двух элементов ИЛИ, двух элементов НЕ, одновибратора, дифферениируюшей цепи, формирователя, триггера и блока динамического торможения, при этом первый вход первого- элемента И подключен к первому входу логического блока, второй вход этого элемента соединен с вторым входом первого элемента ИЛИ и подключен к второму входу логического блока, а выход указанного элемента И соединен с первым входом второго эле- .мента ИЛИ; первый вход второго элемента И подключенК третьему входу логического блока, второй его вход соединен с первым входом первого элемента ИЛИ и подключен к четвертому входу логического блока, а выход второго элемента И соединен с вторым входом второго элемента ИЛИ, выход первого элемента ИЛИ соединен через формирователь с нулевым входом триггера, единичный выход которого подключен к пятому выходу логического блока, а нулевой выход соединен с вторым входом третьего элемента И, выход последнего подключен к четвертому выходу логического блока, выход второго элемента ИЛИ соединен через дифференцирующую цепь с единичным входом триггера, через первый элемент НЕ с первым входом третьего элемента И, а также с первым входом четвертого элемента И и с входом одновибратора, выход которого сбединен с входом блока торможения и через второй элемент НЕ с вторым входом четвертого элемента И, а его выход поаключен к третьему вы.хо-
.9 99615110
цу логического блока, при этом ава вбь-1. Авторское свидетельство СССР
хоаа блока торможения подключены к пер-№ 6О3546, кл. В 23 К 37/О4, 1976.
вому и второму выходам логическогоблока,2, Авторское свидетельство СССР
Источники информации,$ 621517, кл. В 23 К 37/О4, 1977
принятые во внимание при экспертизе(прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления позиционированием тележки манипулятора | 1986 |
|
SU1364464A1 |
| Устройство для программного управления и контроля хода шахтной подъемной машины | 1985 |
|
SU1299932A1 |
| Устройство для направления электрода по стыку | 1978 |
|
SU774845A1 |
| Устройство для торможения противовключением трехфазного асинхронного электродвигателя | 1988 |
|
SU1577044A1 |
| Устройство контроля системы импульсного регулирования тяговых электродвигателей транспортного средства | 1985 |
|
SU1355509A1 |
| Вентильный электропривод | 1985 |
|
SU1277338A1 |
| Устройство управления дуговой сваркой | 1987 |
|
SU1505705A1 |
| Устройство для управления частотно-регулируемым электроприводом | 1985 |
|
SU1309245A1 |
| Устройство для диагностирования технического состояния тормозной системы транспортного средства | 1984 |
|
SU1161421A1 |
| Манипулятор для сварки | 1979 |
|
SU852479A1 |
//
Фиг.1
