Изобретение относится к измерительной тсзхнике и может быть использовано для динамического измерения углов различных объектов, например многоrjpaHHMx призм.
Известен гониометр, содержащий поворотную платформ/: с приводом, датчик угловых перемеэдений, механически связанный с поворотной платформой , блок (формирования времейн ах интервалов, вход которого подключён к датчику угловых перегющений, а выход связан с приводом Л13.Недостатке гониометра являетЬя невысокая точность измерений.
Наиболее бйкзКИМ к изобретению по технической суийяости является лазерный гониометр, содержащий поворотную 1№атф ч)МУ с приводом, КОЛЬ . цевой лазер, механически связанный с поворотной платформой; блок фо1 нрования временных инте1рвалов, генератор, делитель частоты,.частотный дискриминатор, блок Обработки инфор мации, первый вход которого подключен к блоку формирования временных интервалов, выход, кольцевого лазера соединен с ВТорйлм входом блока обработки информации и первым входом частотного даскриминатора, второй .
вход которого подключен к выходу делителя частоты, вход которого под-, ключен к генератору, выход частотного дискриминатора соединен с управляющим входом привода С2.
Недостатком лазерного гониометра является зависимость результатов измерений от изменения абсолютной скорости вращения поворотной плат10формы с {Кольцевым лазером.
Цель изобретения - Повышение точности измерени).
Указанная цель достигается тем, что лазерный гониометр снабжен вто15рьт делителем частоты, вторьм частот1 ньм дискриминатором н датчиком угловых перемещений, Механически связанtasM с поворотной платформой, кольцевой лазер выполнен управляемым по
20 частоте, выход датчика угловых перемещений соединен с первым входом вто-рого частотного дискриминатора, второй вход которого подключен к выходу второго делителя частоты, вход кото25рого подключен к генератору, выход второго частотного дискриминатора соединен с управляющим входом кольцевого лазера.
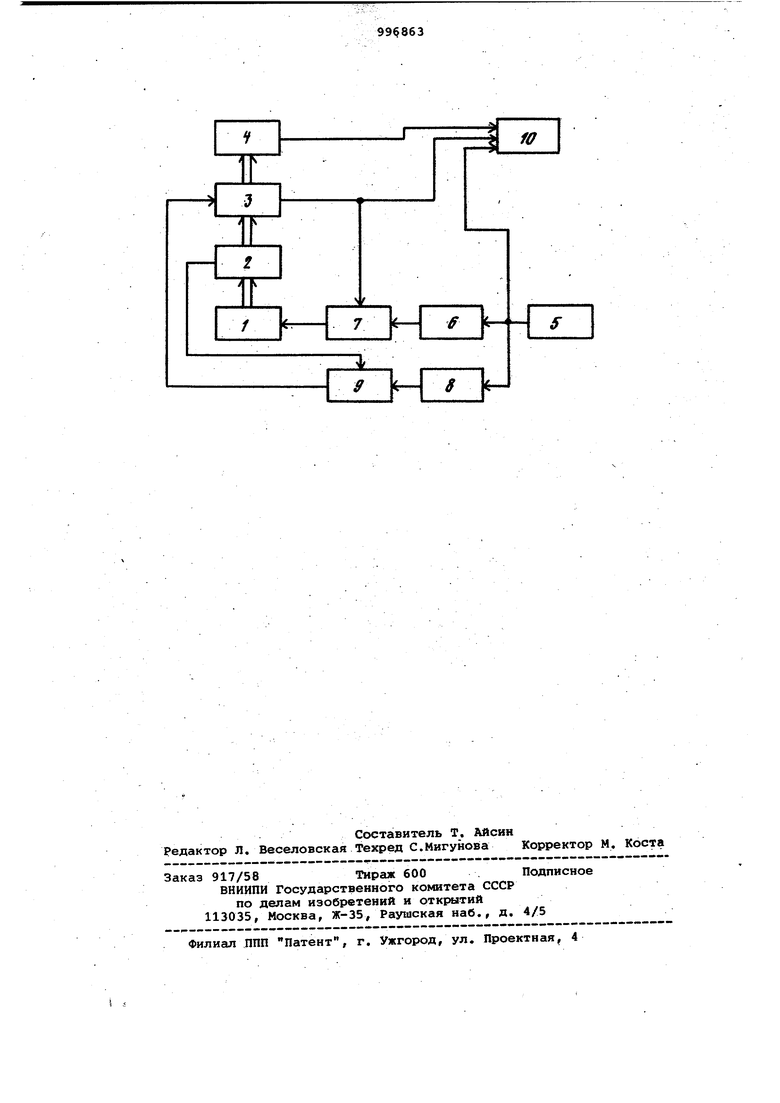
На чертеже представлена функцио30нальная схема лазерного гониометра.
Гониометр содержит поворотную платформу 1 с приводом, датчик 2 угловых перемещений, кольцевой лазер 3, блок 4 формирования временных интервалов, генератор 5, делитель 6 частоты, частотн1ай дискриминатор 7, второй делитель 8 частоты, второй частотный дискриминатор 9, блок 10 обработки информации.
Лазерный грниометр работает следующим образом.
Поворотная платформа 1 с приводом приводит во вращение датчик 2 угловых перемещений и кольцевой лазер 3. При вращении поворотной платформы 1 блок 4 формирования временных интервалов формирует временные интервалы, длительность которых пропорциональна, например, углам между отдельными гранями многогранной призмы.
Временной интервал, сформированный блоком 4 формирования временных интервалов, заполняется импульсами, снимаемлми с вькода кольцевого лазера 3, в блоке 10 обработки информа« «
Для стабилизации частоты импульсов, снимаемых с выхода кольцевого лазера 3, используются две ветви автоподстройки частоты.
Первая ветвь состоит из генератора 5, делителя 6 частоты, частотного дискриминатора 7, выход которого связан с приводом поворотной платформы 1.
Вторая ветвь состоит из датчика 2 угловых перемещений, генератора 5, второго делителя 8 частоты, второго дискриминатора 9, выход которого связан с управлянщим входом кольцевого лазера 3.
Импульсы с выхода кольцевого лазера 3 поступают на первый вход частотного дискри1 шн атора 7, на второй вход которого поступают импульсы с выхода делителя 6 частоты.
В случае отличия частот, формируемых кольцевым лазером 3 и делителем 6.частоты, на выходе частотного дискриминатора 7 формируется сигнал, изменякшщй скорость вращения поворотной платформы 1.
Импульсы с выхода датчика 2 угловых перемещений поступают на первый вход второго частотного дискриминатора 9, на второй вход которого поступают импульсы с выхода второго делителя 8 частоты.
В случае отличия частот, формируемых датчиком 2 угловых перемещений и вторым делителем 8 частоты, на выходе второго частотного дискриминатора 9 формируется сигнал, изменяющий частоту кольцевого лазера 3, например, путем перемещения одного из элементов , изменяющих длину оптического хода лучей..
Благодаря наличию двух ветвей автоподстройки частоты выполняется условие
Кду - к s7
l,
-
кл
AZ
где - угловая частота кольцевого лазера;
Кд,у - коэффициент передачи датчика угловых перемещений}
Кя , Кд - коэффициенты передачи первого и второго делителей частоты ;
QQ - угловая скорость поворотной платформы относительно основания;
Kj. - коэффициент передачи гониометра.
Из приведенной зависимости следует, что угловаячастота кольцевого лазера 3 не зависит от абсолютной угловой скорости кольцевого лазера, что позволяет повысить точность измерений.
Формула изобретения
Лазерный гониометр, содержащий поворотную платформу с приводом, кольцевой лазер, механически связан.ный с поворотной платформой, блок формирования временных интервалов, генератор, делитель частоты, частотный дискриминатор, блок обработки информации, первый вход которого подключен к блоку формирования временных интервалов, выход кольцевого лазера соединен с вторым входом блока обработки информации и первым входом частотного дискриминатора, второй вход которого подключен к выходу делителя частоты, вход которого подключен к генератору, выход частотного дискриминатора соединен с управляющим входом привода, о т л и ч аю щ и и с я тем, что, с целью повышения точности измерений, он снабжен вторым делителем частоты, вторым частотным дискриминатором и датчиком угловых перемещений, механически связанным с поворотной платформой, ксшьцевой лазер выполнен управляемым по частоте, выход датчика угловых перемещений соединен с первым входом второго частотного дискриминатора, второй вход которого подключен к выходу второго делителя частоты, вход которого подключен к генератору, выход второго частотного дискриминатора соединен с управляющим входом кольцевого лазера.
Источники информации, принятые во внимание при экспертизе
1.Патент QdA № 3626512, кл. 6 01 В 11/26, 1971.
2.Авторское свидетельство СССР 717956, кл. G 01 В 19/00, 1979 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный гониометр | 1988 |
|
SU1587339A1 |
| ГОНИОМЕТР | 2002 |
|
RU2222777C1 |
| Двухрежимный зеемановский лазерный гироскоп | 2020 |
|
RU2740167C1 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР ДЛЯ РАКЕТ МОРСКОГО БАЗИРОВАНИЯ | 2014 |
|
RU2565821C1 |
| Устройство регулировки периметра четырехчастотного зеемановского лазерного гироскопа | 2022 |
|
RU2796228C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ ГИРОСКОПОВ | 2000 |
|
RU2176783C1 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР ЦЕЛЕУКАЗАНИЯ | 2014 |
|
RU2563312C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РЕЗОНАТОРА ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА ЛУЧОМ ЛАЗЕРА | 1993 |
|
RU2079107C1 |
| Позиционный электропривод | 1984 |
|
SU1270859A1 |
| Устройство для измерения погрешности импульсных датчиков угла | 1981 |
|
SU1002813A1 |