Изобретение отнЬсится к фотограмметрическому приборостроению и может быть использовано в различных стерарг прие$орах, имекицих стереокомпараторную измерительную часть, для ввода в стереомодёль дополнительного изобРсцкения в виде оценочной или измерительной марки, изображения проектных злементов, дешифрированных и поднятых на фотооснове контуров.
Известно устройеггво, используемое в приборе определения гранулометрического состава для автоматического изменения маоятаба оценочной марки его 13.
Известно устройство для ввода изображения измерительных марок в поле зрения фотограмметрического прибора, состоящее з двух малых проекторов, . каждый из которых щюектирует изображение марок в левую и правую ветвь наблюдательной системы. Проекторы имеют одинаковую конструкцию и состоят из объективов, револьверной головки с набором сменных марок, дисков с цветными светофильтрами и осветителей с конденеррами. Ввод изображения выполняется путем проекции его на полупрозрач«ую диагональную .
грань куба, установленного в рптичёС кой системе прибора С23.
Недостатке такого устройства является то, что оно дает возможность изменять масштаб вводимого изображения только ступенчато: путем механической смены его, поворачивая револьверную головку со сменншда маркаки. Для решения ряда задач инженерной
10 фотогранФютрии необходимо, чтобы масштаб вводимого изображения изменялся плаш1о, а не ступенчато, более того, в рчде случаев необходимо, чтобы масштаб изменялся в соот етствии
15 с изменением масштаба точки наведения на стереомодели.
Цель изобретения - повышение производительности труда. .
Указанная цель достигается тем,
20 что в устройстве к стереоприборам для ввода в поле зрения дополнительного изображения, содержащем оптический элемент ввода изображения в наблюдательную систему , проек25ционную систему с переменным увеличением и механизм привода ее, проек- ; ционная система выполнена в виде прямоугольного инверсора, объектив н ось вращения линеек которого закреплены
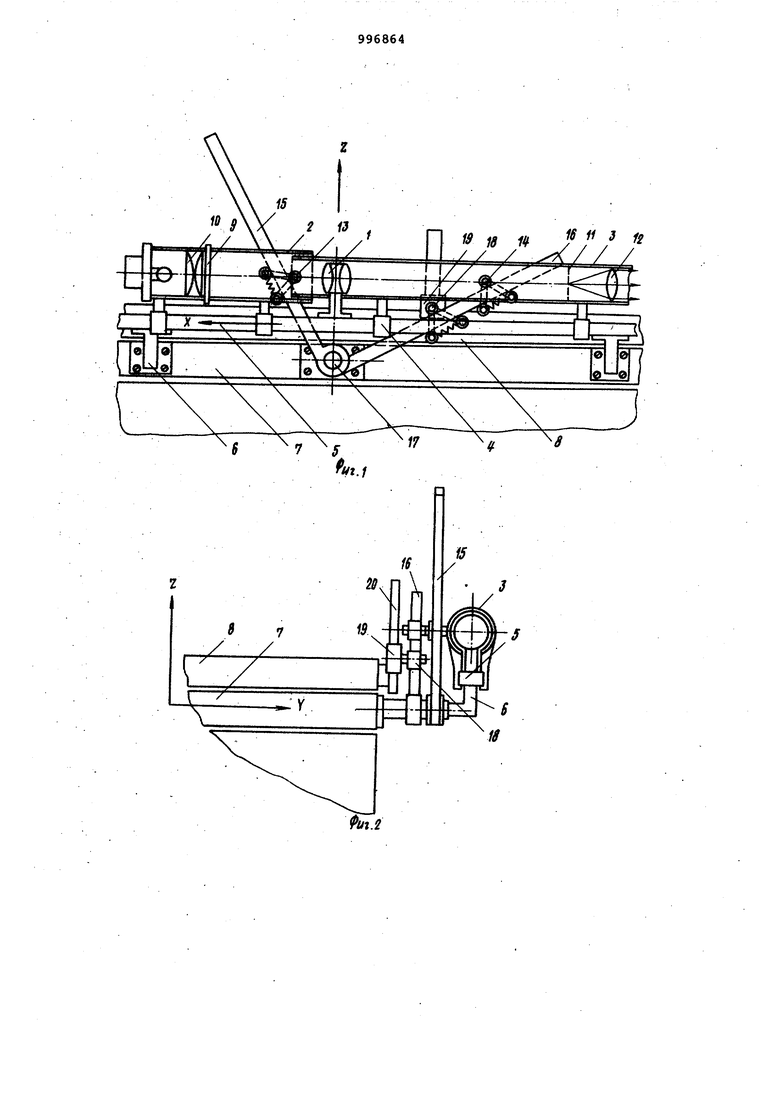
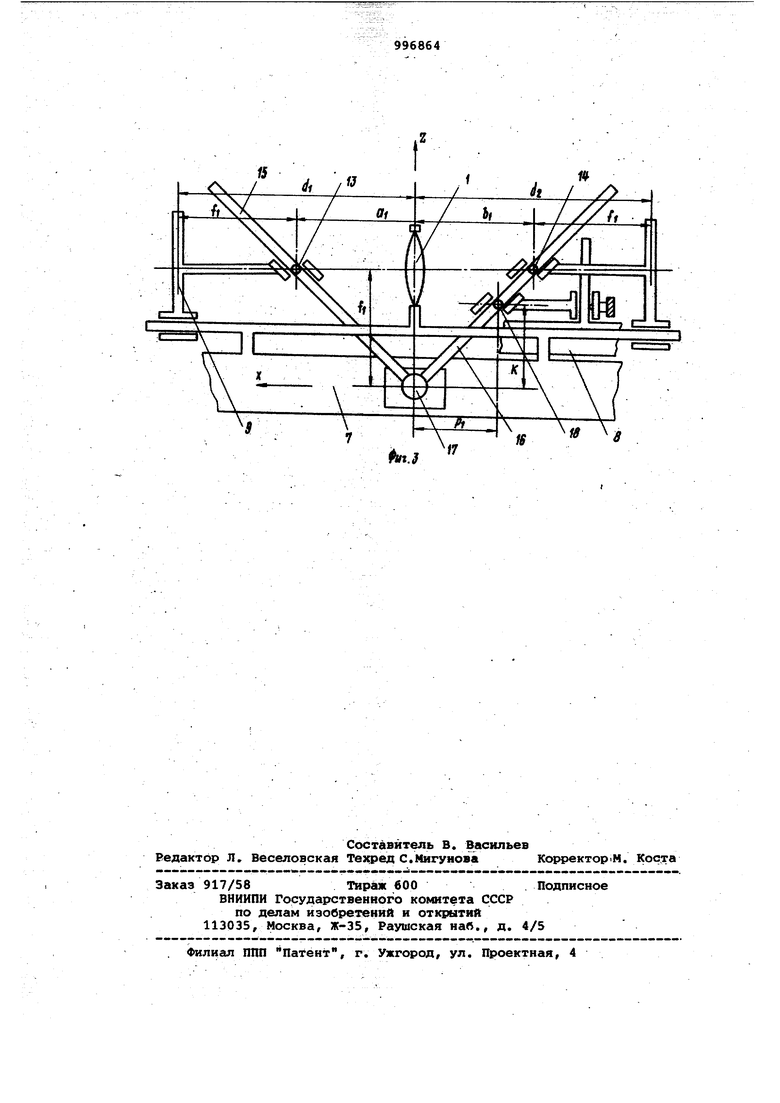
30 неподвижно на основной каретке стереокомпараторной. части на одной вер тикали на расстоянии друг от друга, равном фокусному расстоянию объекти ва проекционной системы, а механизм привода выполнен в виде постоянно прижатого к боковой грани линейки ролика, ось вращения которого укреплена на каретке параллаксов. Ролик привода инверсора установлен на ползуне, имекш м возможность перемещаться по линейке, закрепленной вертикально на каретке параллаксов . На фиг. 1 представлено предаюженное устройство, частичный разрез вдол оси оптической система проектора,на фиг. 2 - то же(Профильная проекция с частичным вырезом по главней плоскости объектива; на фиг, 3 схема устройства с указанием cyinecTвенных для конструкции размеров. Устройство состоит из оптического элемента ввода изображения в наблюдательную систему прибора, телескопической, проекционной системы с переменным увеличением и механизма автоматического привода ее. Проекционная система имеет объектив 1 и две каретки 2 и 3, имеюгцие возможность с помощью ползунов 4 перемещаться по направляющей 5, которая закреплена кронштейнами б на основной каретке 7 cTepeoKONtnapaTopa параллельно движению каретки горизонтальных параллаксов 8 (оси X прибора), В каретке 2 . установлены рамка 9, несущая диапозитив с дополнительным изображением, и осветитель с тсонденсором 10. В каретке 3 установлена плоскость проекции 11 с дополнительным объективом 12 телескопической систе1«и. На карет ках на расстоянии f (1 Фокусное расстояние объектива проекционной си стемы) соответственно от плоскости рамки 9 и плоскости проекции 11 в сторону объектива закреплены оси при водных роликов 13 и 14. Привод проекционной системы выпол нен в виде прямоугольного инверсора, которьй имеет линейки 15 и 16, скреп ленные между собой под прямым углом, вершина которого находится на оси вращения 17, неподвижно закрепленной на основной каретке 7 на расстоянии f от оптической оси проектора. Боко вые поверхности роликов 13 и 14 постоянно; прижаты к ребрам линеек соответственно 15 и 16 с помощью ножниц. Кроме того, в приводе имеется ролик 18, ось вращения которого закреплена на каретке горизонтальных параллаксов 8 на расстояниях от цент ра вращения линеек: по вертикали - , по горизонтали - р. Боковая поверхность ролика 18 постоянно прижата к ребру линейки 16, чем обеспечивается передача движения от каретки горизонтальных параллаксов 8 к линейкам инверсора. Ось ролика укреплена на ползуне 19 линейки 20, которая жестко скреплена с кареткой 8, что позволяет изменять положение ролика по .вертикали в соответствии со значением - . га Сопряжение устройства с кареткаvsA стереокомпараторной части показано на фиг. 1, 2 и 3. Выделены три основных условных сопряжения. 1. Устройство установлено в стереокомпараторной части так, что оптическая ось проекционной системы и направляющая 5 параллельны оси X прибора (в описании использует.ся обозначение осей, соответствующее аэрофотосъемке) , т.е. направлению движения каретки параллаксов. 2.Ось 17 вращения линеек, направляющая 5 и держатель объектива 1 закреплены неподвижно на основной каретке прибора, причем расстояние между оптической осью объектива 1 и осью 17 вращения линеек по оси .Z (см. фиг. 3) равно f. 3.Ролик 18 привода инверсора закреплен на каретке продольных параллаксов с возможностью перемещения по линии, параллельной оси Z прибора, на расстояние осью 17 вращения линеек и осыо ролика 18 по оси X, равном значению продольного параллакса р (см. фиг. 3). Расстояние по оси Z между осью вращения линеек и осью ролика устаг навливается для каждой стереопары индивидуально (путем перемещения ролика и фиксации в разных положениях) из условия, чтобы оно было равно 2 (где В - базис фотографирования и m - знаменатель масштаба вводимого изображения). Устройство работает следуювдам образом.. При стереоскопическом наведении измерительной марки на произвольную точку А (Х, Y, Z) винт горизонтального параллакса смещает каретку параллаксов 8 относительно основной каретки 7 на величину р, и вместе с ней ось ролика 18 на зту же величину. Это вызывает поворот линейки 16, вследствие чего ролик 14 устанавливается на расстоянии ь,. itp : (см. фиг, 3), Поворот линейки 16, в свою очередь, вызывает поворот жестко соединенной с ней линейки 15, что устанавливает ролик 13 на расстоянии а от главной плоскости объектива 1. При этом, если в кассете 9 находится диапозитив, масштаб изображения которого т, то в плоскости проекции 11 OHO проекцируется в масшт бе М m 7 где V - увеличение проектирующей системы. Как известно, увеличение проецирую системы равно V « -5, а так как расстояние от роликов 13 и 14 до кассеты с изображением к плоскости проекции равно f, то . . bi f-1 . . t « N Подставляя значения а и b в последнее выражение, получают f, . Следовательно, масштаб в плоскости проекщ и. , , т- В В р-1 P1 Как известно, масштаб любой точки на фотоснимке -. Т.е. масштабы проецируемого изобра жения и точки наведения равны. Устройство для двода в поле зре ния стереоприбора дополнительного изображения в переменном масштабе позволяет создать марки с плавно и меняющимся масштабом, которые окаж ся полезными в большинстве стереоф тограмметрических приборов, например стекометре, топокарте,. технока и др. Возможность автоматического изм нения масштаба дополнительного изо ражения в соответствии с масштабом точки наведения, обеспечиваемая ус ройством, позволяет создать ные марки для оценки .или непосредс венного измерения объектов на стер модели. Такая марка, например, Нео ходима для прибора определения гранулометрического состава, так как она повышает производительность работы его в несколько раз. Кроме этого, устройство позволяет вводить в стереомодель второе совмещенное изображение, представлякяцее собой фотоизображение с дешифрированными контурами (при геологическом картировании), фотоизображение, полученное в ином участке спектра и т.д. Формула изобретения 1.Устройство к стереоприборам для ввода в поле зрения дополнительного изображения, содержащее оптический элемент ввода изображения в наблюдательную систему прибсчоа, проекционную систему с переменным увеличением и механизм привода ее, о т л ич а ю ы е ее я тем, что с целью повышения производительности труда путем обеспечения постоянного равенства масштабов точки наблюдения в стереомодели и вводимого изображения, проекционная система выполнена в виде прямоугольного инверсора, объектив и ось вра1це11ия линеек кото- рого закреплены неподвижно на основной каретке стереокомпэд ат ч ной части на одной вертикали на расстоянии доуг от друга, равном фокусному расстоянию объектива проекционной системы, а механизм привода выполнен в виде постоянно прижатого к боковой грани линейки ролика, ось вращения которого укреплена на каретке параллаксов. 2.Устройство по-п. 1, отличающееся тем, что ролик привода инвед сора установлен на ползуне, имеющем возможность перемещаться по линейке, закрепленной вертикально на каретке параллаксов. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 481767, кл. G 01 С 11/00, 10.04.73. 2.Описание и инструкция по эксплуатации Стекометра Народного предприятия Цейсе ГДР, 1961 (прототип). 16 11 S 12
гч / А /
л I /ХХл . ., 1Г


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дифференциального трансформирования плановых аэроснимков | 1985 |
|
SU1392374A1 |
| Приставка к стереофотограмметрическому прибору | 1984 |
|
SU1168801A1 |
| Устройство для определения гранулометрического состава породы | 1973 |
|
SU481767A1 |
| СТЕРЕОАВТОГРАФ | 1971 |
|
SU309241A1 |
| Фототрансформатор | 1982 |
|
SU1081415A1 |
| Стереопреобразователь | 1955 |
|
SU110486A1 |
| СКАНИРУЮЩИЙ НАБЛЮДАТЕЛЬНЫЙ ПРИБОР | 2002 |
|
RU2204856C1 |
| Топографический проектор для составления карты местности по аэроснимкам | 1951 |
|
SU95371A1 |
| ФОТОТРАНСФОРМАТОР ДЛЯ ДИФФЕРЕНЦИАЛЬНОГО ТРАНСОРФОМИРОВАНИЯ АЭРОФОТОСНИМКОВ | 1967 |
|
SU224821A1 |
| ПРИБОР ДЛЯ СТЕРЕОФОТОГРАММЕТРИЧЕСКОЙ ОБРАБОТКИ АЭРОСНИМКОВ | 1948 |
|
SU79204A1 |