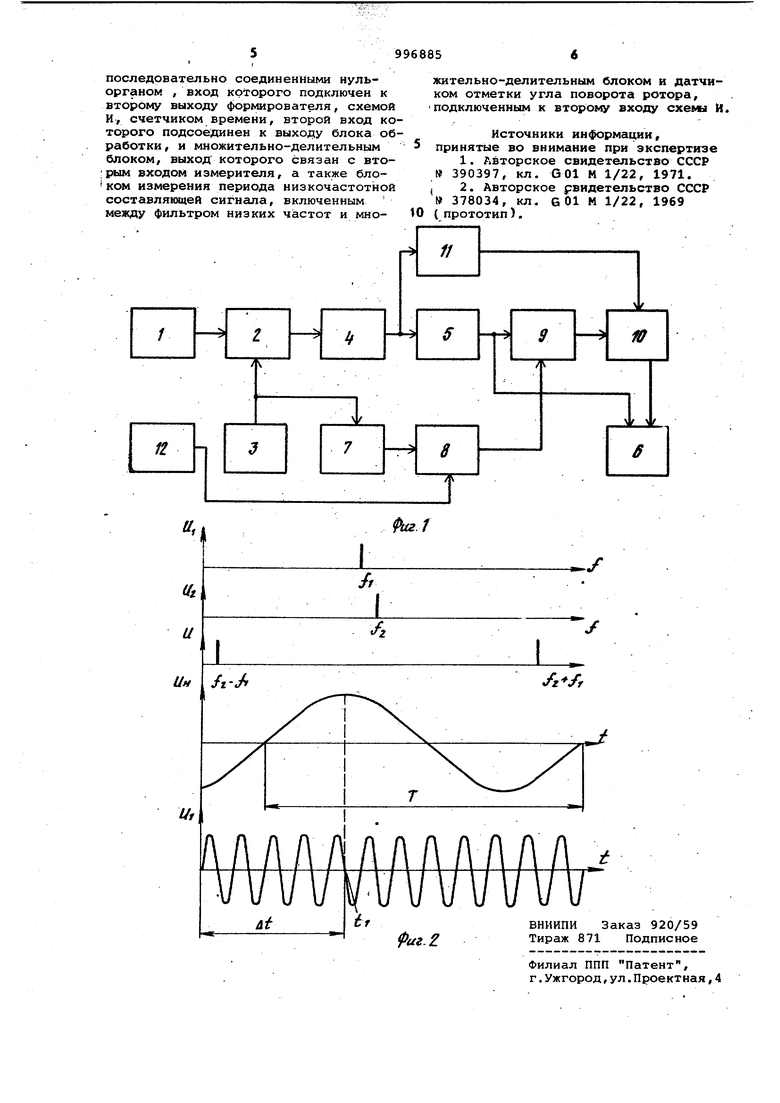
снабжено последовательно соединенными нуль-органом,вход которого подключен к второму выходу форладрователя, схемой И, счетчиком времени, вто рой вход которого подсоединен к выходу блока обработки, и множительноделительным блоком, выход которого связан с вторым входом измерителя, а также блоком измерения периода низкочастотной составляющей сигнала, включенным между фильтром низких час тот и множительно-делительным блоком и датчиком отметки угла поворота ротор а, подключенным к второму вход схемы И. На фиг. 1 изображено устройство для определения параметров вектора дисбаланса ротора, общий вид; на фиг. 2 - эпюры напряжений. Устройство для определения параметров вектора дисбаланса ротора со держит последовательно соединенные датчик 1 дисбаланса, формирователь опорного синусоидального напряжения выполненный на основе блока 2 перемножения и генератора 3 низкой частоты, фильтр 4 низких частот, блок обработки низкочастотной составляющ сигнала, определяющий максимум низк частотной составляющей и измеритель б дисбаланса, последовательно соеди ненные нуль-орган 7, вход которого подключен к второму выходу формиров теля, схему 8 И, счетчик 9 времени, второй вход которого подсоединен к выходу блока 5 обработки низкочасто ной составляющей сигнала, и множительно-делительный блок.10, выход которого связан с вторым входом изм рителя 6, а также блок 11 измерения периода низкочастотной составляющей сигнала, включенный между фильтром низких частот и множительно-делител ным блоком 10, и датчик 12 отметки угла поворота ротора (не показанJ, подключенный к второму входу схемы 8 И. Устройство работает следующим образом. При вращении ротора с балансирово ной скоростью с датчика 1 на блок 2 перемножения формирователя поступают электрические сигналы, пропорциональ ные Механическим колебаниям ротора. Частота этих сигналов f, т.е. это частота вращения ротора. С генератор 3 идеальное напряжение Ц с частотой f поступает на блок 2. Частота f. отличается от частоты f сигнала (j на заданную величину (вцолне достаточно, чтобы эти сигналы отличались на 10%, например f 55 Гц при f 50 Гц;, тогда if а,- fj /50-55/ 0,1 1 На выходе блока 2 получают полезный . сигнал с разностной частотой Af « fi - f и сигнал помехи с частотой f-z. + f Эти сигналы поступают на фильтр 4 низких частот, на выходе которого остается только низкочастотная составляющая UH частотой Af f.- f . В момент времени t, в который совпадают нулевая фаза опорного напряжения и , фиксируемая нуль-органом 7, при и О выдающим сигнал на логическую схему 8 И, и прохождение отметкой фазы ротора датчика 1 дисбаланса (моменты прохождения отметкой угла ротора датчика 1 дисбаланса регистрируются датчиком 12 отметки фазы, который также выдает соответствующие сигналы на логическую схему 8 и), логическая схема 8 И запускает счетчик 9 времени. Счетчик открытдо тех пор, пока на его запрещающий вход не поступает сигнал с блока 5, формируемый в момент t достижения напряжением Уц своего максимального значения. Этим же сигналом с блока 5 считывается информация со счетчика 9 и переписывается в множительно-делительный блок 10, на другой вход которого поступает информация о . длительности периода Т с блока 11. Блок 10 производит операции в соответствии с выражением ., где Ч - фаза вектора дисбаланса ротора; At - временной интервал, и выдает результат измерения, фазы вектора дисбаланса на измеритель б , на который с блока 5 поступает также сигнал, несущий информацию о модуле вектора дисбаланса. Погрешность определения фазы tf вектора дисбаланса (при определении временных интервалов At и Т и задании константы 21С с погрешностью 0,05%) не превышает 0,2-0,3° что позволяет в 5-10 раз повысить точность определения фазы вектора дисбаланса при сохранении точности измерения амплитуды вектора дисбаланса. .Формула изобретения Устройство для определения параметров вектора дисбаланса ротора, содержащее последовательно соединенные датчик дисбаланса, формирователь опорного синусоидального напряжения , фильтр нижких частот, блок обработки низкочастотной составляющей сигнала и измеритель, отличающееся тем, что, с целью повышения точности определения фазы вектора дисбаланса, оно снабжено
последовательно соединенными нульорганом , вход которого подключен к второму выходу формирователя, схемой И, счетчиком времени, второй вход которого подсоединен к выходу блока обработки , и множительно-делительным блоком, выход которого связан с вторык входом измерителя, а также блоком измерения периода низкочастотной составляющей сигнала, включенным между фильтром низких частот и множительно-делительным блоком и датчиком отметки угла поворота ротора, подключенным к второму входу схемл И
Источники информации, 5 принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 390397, кл. G01 М 1/22, 1971. 2. Авторское рвидетельство СССР 378034, кл. G01 М 1/22, 1969 10 ( прототип).
fi;
/
| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительное устройство к балансировочному станку | 1990 |
|
SU1746232A1 |
| Способ двухцикловой балансировки роторов и устройство для его осуществления | 1987 |
|
SU1446506A1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО К БАЛАНСИРОВОЧНОМУ СТАНКУ | 1992 |
|
RU2054644C1 |
| Устройство для измерения параметров вектора дисбаланса вращающихся тел | 1986 |
|
SU1315844A2 |
| Измерительное устройство к балансировочному станку | 1982 |
|
SU1043498A1 |
| Устройство для определения вектора дисбаланса | 1990 |
|
SU1755081A1 |
| Измерительное устройство к балансировочному станку | 1989 |
|
SU1649328A1 |
| Устройство для измерения величины и угла дисбаланса изделий | 1981 |
|
SU974172A1 |
| Устройство для измерения параметров вектора дисбаланса вращающихся тел | 1983 |
|
SU1151845A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1320670A1 |
