1 1
Изобретение относится к балаисиро вечной технике, может быть использовано при балансировке вращающихся де талей и узлов машин и механизмом и является усовершенствованием устройства по авт, св. № 1151845.
Целью изобретения является автома тизация процесса измерения параметров дисбаланса вращающихся тел в шиг- роком диапазоне частот вращения за счет цифроаналогового управления настрочкой полосы пропускания избира тельного фильтра на оборотную частоту объекта балансировки..
На фиг.1 представлена структурная схема устройства; на фиг. 2 - функцио нальная схема перестраиваемого избирательно фильтра; на фиг.З - фу 1кцио нальная схема широтно-импульсного мо дулятора.
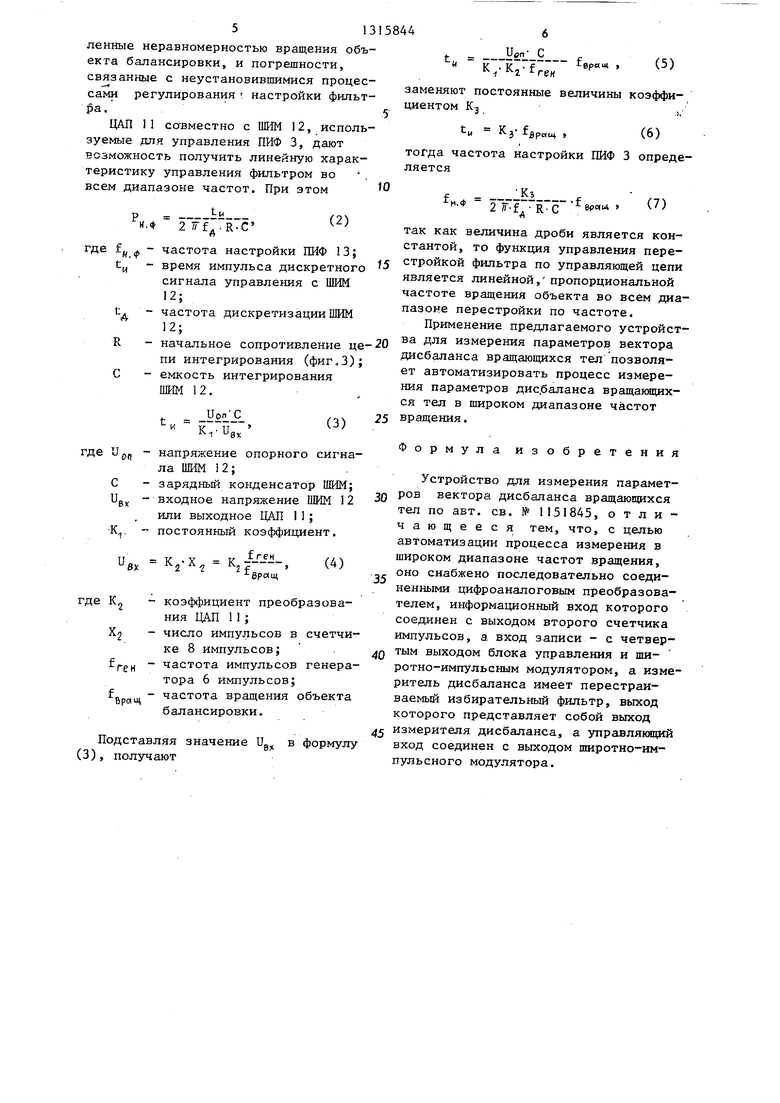
Устройство для измерения параметров вектора дисбаланса вращающихся тел содержит генератор 1 синхроимпульса, измеритель 2 дисбаланса с перестраиваемым избирательным фильтром 3 (ПИФ), соединенные с выходом последнего формирователь 4 импульса и индикатор 5 значения дисбаланса, генератор 6 импульсов, соединенные с его выходом счетными входами пер- вый и второй счетчики 7 и 8 импульсов, соединенный с выходами последних вычислитель 9, индикатор 10 угла дисбаланса, в-ход которого соединен с выходом вычислителя 9, последовательно соединенные цифроаналоговый преобразователь 1I (ЦАП), информационный вход которого соединен с выходом второго счетчика 8 импульсов, широтно-импульсный модулятор 12 (ШИМ), выход которого соединен с управляющим входом ПИФ 3, и блок 13 управления, входы которого соединены с выходами генератора 1 синхроимпуль са и формирователя 4 импульса, а выходы - с управляющими входами счетчиков 7 и 8 импульсов, вычислителя 9 входом записи ЦАП 11.
В качестве генератора 1 синхроимпульса можно использовать, например, бесконтактный индуктивный измерительный преобразователь, вырабатывающий синхроимпульс при прохождении отметки, нанесенной на объект балансировки (датчик метки). В качестве отметки может использоваться выступ из ферромагнитного материала, выпол
fO
J5
20
158442
ненный на периферии вала объекта балансировки.
Формирователь 4 импульса представляет собой устройство, обеспечиваю5 щее преобразование аналогового сигнала от измерителя 2 дисбаланса и импульсный сигнал..
ПИФ 3 представляет собой биквадратный фильтр, управляемый дискрет- ным сигналом с -модулируемой скважностью, обеспечивающий постоянную полосу пропускания во всем диапазоне перестройки по частоте, и может быть выполнен, например, в виде последовательно соединенных входного усилителя 14, первого ключа 15, первого интегратора 16, выход которого является выходом ПИФ 3, второго ключа 17 и второго интегратора 18, первого и второго резисторов 19 и 20,, первые входы которых связаны между собой и с входным усилителем 14, а вторые входы соединены с выходами соответст вующих интеграторов 19 и 20, управляющие входы ключей 15 и 17 являются управляющим входом ПИФ 3.
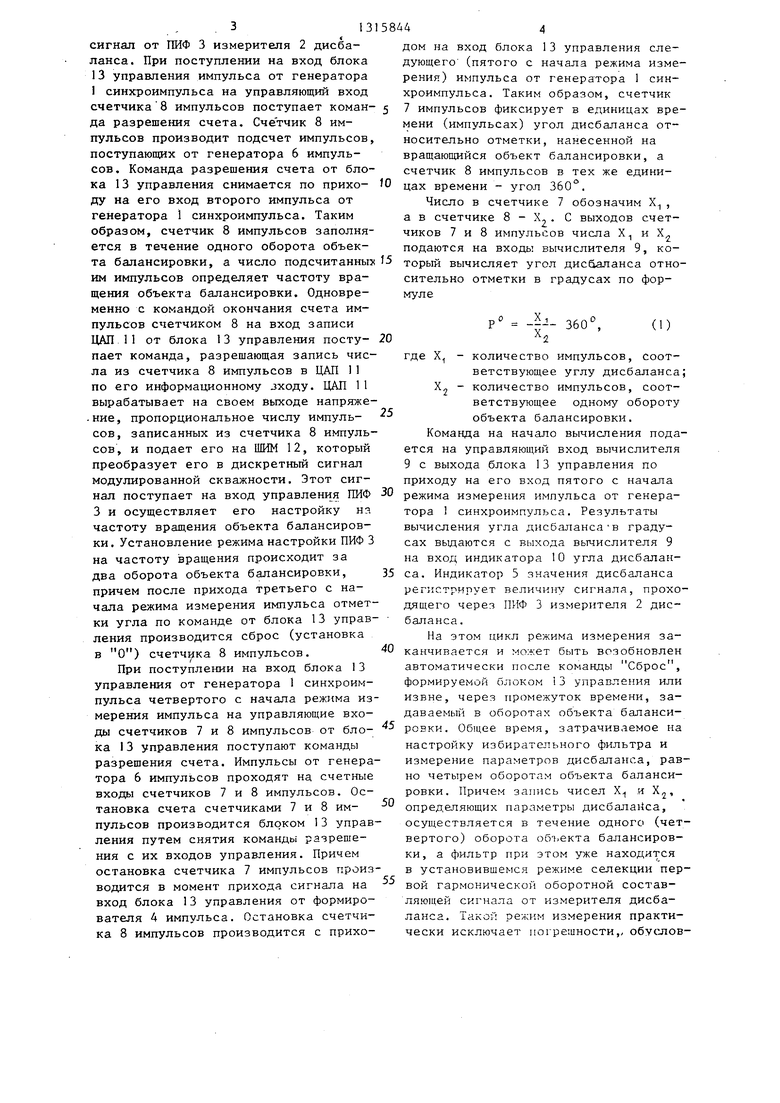
ШИМ 12 может быть выполнен, например, в виде преобразователя 21 напря- жение - ток на операционном усилителе 22, транзисторе 23 и резисторе 24, соединенного с выходом преобразователя 21 напряжение - ток компаратора 25, генератора 26 импульсов дискре- тизации, ключа 27, включенного парал35 лельно емкости 28 в цепи питания транзистора 23, и триггера 29, R- вход которого -соединен с выходом компаратора 25, S-вход - с выходом генератора 26 импульсов дискретизации, инверсный выход - с управляющим входом ключа 27, а прямой выход является выходом иШМ I2, входом которого является вход операционного усилителя 22.
Устройство работает следующим образом.
При включении блок 13 управления автоматически формирует команду Сброс, т.е. команду установки в
5 О счетчиков 7 и 8 импульсов и вычислителя 9, а через заданное время автоматически или по команде извне включает режим измерения. В режиме измерения одновременно открываются
входы блока 13 управления, на которые поступают сигналы от генератора 1 синхроимпульса и формирователя 4 импульса, на вход которого поступает
40
.313
сигнал от ПИФ 3 измерителя 2 дисбаланса. При поступлении иа вход блока 13 управления импульса от генератора 1 синхроимпульса на управляющий вход счетчика 8 импульсов поступает коман да разрешения счета. Счётчик 8 импульсов производит подсчет импульсов поступающих от генератора 6 импульсов. Команда разрешения счета от блока 13 управления снимается по прихо- ду на его вход второго импульса от генератора 1 синхроимпульса. Таким образом, счетчик 8 импульсов заполняется в течение одного оборота объекта балансировки, а число подсчитанны им импульсов определяет частоту вращения объекта балансировки. Одновременно с командой окончания счета импульсов счетчиком 8 на вход записи ЦАП 11 от блока 13 управления поступает команда, разрешающая запись числа из счетчика 8 импульсов в ЦАП 11 по его информационному зходу. ЦАП 11 вырабатывает на . ние, сов, записанных из счетчика 8 импуль
своем Выходе напряже пропорционапьное числу импуль-
сов, и подает его на ШИМ 12, который преобразует его в дискретный сигнал модулированной скважности. Этот сигнал поступает на вход управления ПИФ 3 и осуществляет его настройку на частоту вращения объекта балансировки. Установление режима настройки ПИФ 3 на частоту 1вращения происходит за два оборота объекта балансировки, причем после прихода третьего с начала режима измерения импульса отметки угла по команде от блока 13 управ- ления производится сброс (установка в О) счетчика 8 импульсов.
При поступлении на вход блока 13 управления от генератора 1 синхроимпульса четвертого с начала режима измерения импульса на управляющие входы счетчиков 7 и 8 импульсов от блока 13 управления поступают команды разрешения счета. Импульсы от генератора 6 импульсов проходят на счетные входы счетчиков 7 и 8 импульсов. Остановка счета счетчиками 7 и 8 импульсов производится блоком 13 управления путем снятия команды разрешения с их входов управления. Причем остановка счетчика 7 импульсов производится в момент прихода сигнала на вход блока 13 управления от формирователя 4 импульса. Остановка счетчика 8 импульсов производится с прихо
5 O цах времени 5
0
дом на вход блока 13 управления следующего (пятого с начала режима измерения) импульса от генератора 1 синхроимпульса. Таким образом, счетчик 7 импульсов фиксирует в единицах времени (импульсах) угол дисбаланса относительно отметки, нанесенной на вращающийся объект балансировки, а счетчик 8 импульсов в тех же единиугол 360°.
Число в счетчике 7 обозначим Х, а в счетчике 8 - X.. С выходов счетчиков 7 и 8 импульсов числа Х и X,j подаются на входы вычислителя 9, который вычисляет угол дисбаланса относительно отметки в градусах по формуле
р - З6o (1)
Xj
цах времени
где X, - количество импульсов, соответствующее углу дисбаланса; Х - количество импульсов, соответствующее одному обороту объекта балансировки.
Команда на начало вычисления подается на управляющий вход вычислителя 9 с выхода блока 13 управления по приходу на его вход пятого с начала режима измерения импульса от генератора 1 синхроимпульса. Результаты вычисления угла дисбаланса в градусах выдаются с выхода вычислителя 9 на вход индикатора 10 угла дисбаланса. Индикатор 5 значения дисбаланса регистрирует величи1гу сигнала, проходящего через ПИФ 3 измерителя 2 дисбаланса.
На этом цикл режима измерения заканчивается и может быть возобновлен автоматически после команды Сброс, формируемой блоком 13 управления или извне, через промежуток времени, задаваемый в оборотах объекта балансировки. Общее время, затрачиваемое на настройку избирательного фильтра и измерение параметров дисбаланса, равно четырем оборотам объекта балансировки. Причем запись чисел Х и Х, определяющих параметры дисбапа1 са, осуществляется в течение одного (четвертого) оборота об1)екта балансировки, а фильтр при этом уже находится в установившемся режиме селекции первой гармонической оборотной составляющей сигнала от измерителя дисбаланса. Такой режим измерения практически исключает погрешности,, обуслов513
ленные неравномерностью вращения объекта балансировки, и погрешности, связанные с неустановившимися процессами регулирования настройки фильтра.
ЦАП 11 совместно с ШИМ 12, используемые для управления ПИФ 3, дают возможность получить линейную характеристику управления фильтром во всем диапазоне частот. При этом
tt.
К.Ф
2 Ff.R-C
(2)
де f
н.ф
-A
15
R
частота настройки ПИФ 13;
время импульса дискретного
сигнала управления с ШИМ
12;
частота дискретизации ШИМ
12;
начальное сопротивление це-20
пи интегрирования (фиг,3);
емкость интегрирования
ШИМ 12.
К,
U0x
(3)
где и С
и
on
вх
напряжение опорного сигнала ШИМ 12;
зарядный конденсатор ШИМ; входное напряжение ШИМ 12 или выходное ЦАП 11; постоянный коэффициент.
Формула изобретения
SX
К,
Х,
К,
f ген
if
(4)
бращ
35
где К 2
2 f
геи
Врац
коэффициент преобразования ЦАП 11;
число импульсов в счетчике 8 импульсов; частота импульсов генератора 6 импульсов; частота вращения объекта балансировки.
Подставляя значение Ug (3), получают
Устройство для измерения парамет- 2Q ров вектора дисбаланса вращающихся теп по авт. св. № 1151845, отличающееся тем, что, с целью автоматизации процесса измерения в широком диапазоне частот вращения, оно снабжено последовательно соединенными цифроаналоговым преобразователем, информационный вход которого соединен с выходом второго счетчика импульсов, а вход записи - с четвер- Q тым выходом блока управления и ши- ротно-импульсным модулятором, а измеритель дисбаланса имеет перестраиваемый избирательный фильтр, выход которого представляет собой выход измерителя дисбаланса, а управляющий в формулу вход соединен с выходом широтио-им- пульсного модулятора.
u,
en
K.-K,-f
ген
Серащ ,
(5)
заменяют постоянные величины коэффициентом Kj,.
(6) опреде и °° Kj- fgpaui,
тогда частота настройки ПИФ 3 ляется
I-H.
KJ
2 /Г-f R-C
6pO(l4
(7)
так как величина дроби является константой, то функция управления перестройкой фильтра по управляющей цепи является линейной, пропорциональной частоте вращения объекта во всем диапазоне перестройки по частоте.
Применение предлагаемого устройства для измерения параметров вектора дисбаланса вращающихся тел позволяет автоматизировать процесс измерения параметров дис баланса вращакщих- ся тел в широком диапазоне частот вращения.
Формула изобретения
Управление О-
Редактор О.Юрковецкая
Составитель Ю.Круглов
Техред А.Кравчук Корректор И.Муска
Заказ 2352/44
Тираж 776Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фиг, г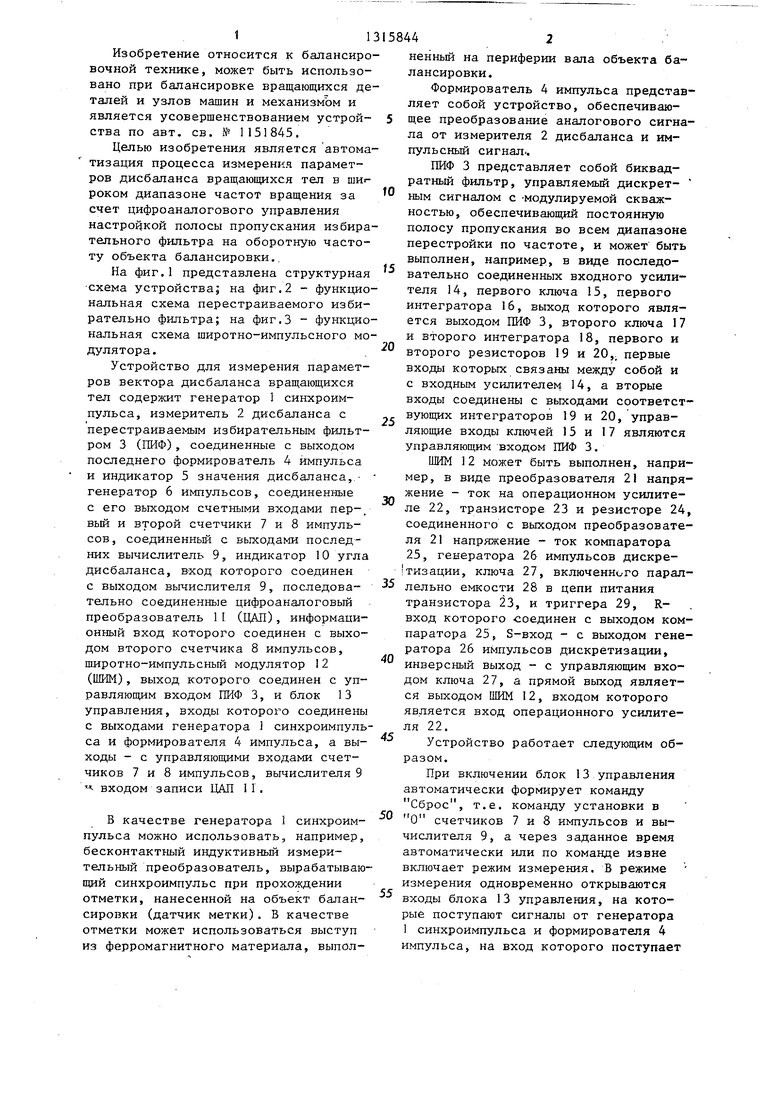
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения параметров вектора дисбаланса вращающихся тел | 1983 |
|
SU1151845A1 |
| Измеритель вектора дисбаланса | 1987 |
|
SU1439423A1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО К БАЛАНСИРОВОЧНОМУ СТАНКУ | 1992 |
|
RU2054644C1 |
| Измерительное устройство к балансировочному станку | 1990 |
|
SU1746232A1 |
| Устройство для измерения параметров вектора дисбаланса вращающихся тел | 1986 |
|
SU1404856A1 |
| Устройство для измерения дисбаланса | 1988 |
|
SU1522059A1 |
| ИЗМЕРИТЕЛЬ ДИСБАЛАНСА | 1992 |
|
RU2030724C1 |
| Устройство для измерения параметров вектора дисбаланса вращающихся тел | 1986 |
|
SU1308845A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ВРАЩАЮЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА | 1997 |
|
RU2122175C1 |
| Способ двухцикловой балансировки роторов и устройство для его осуществления | 1987 |
|
SU1446506A1 |
Изобретение относится к балансировочной технике и является усовершенствованием устройства по авт. св. № 1151845. Цель дополнительного изобретения - автоматизация измерения параметров дисбаланса в широком диапазоне частот за счет цифроанало- гового управления. Счетчик 8 импульсов подсчитывает число импульсов от генератора 6 импульсов в течение одного оборота балансируемого объекта, т.е. за время прихода одного импульса от генератора 1 синхроимпульса. Цифроаналоговый преобразователь 11, используя число в счетчике 8 импульсов, через широтно-импульсный модулятор 12 управляет настройкой перестраиваемого избирательного фильтра 3. Блок 13 управления обеспечивает циклограмму, работы в порядке поступления сигналов с генератора 1 синхроимпульса. 3 ил. i (Л С СП оо 4 liU i NJ Фиг.1
| Устройство для измерения параметров вектора дисбаланса вращающихся тел | 1983 |
|
SU1151845A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
