Предлагаемый манипулятор предназначен для облегчения работы кузнеца на тяжелых ковочных машинах при нодъеме заготовкн нли при перекладывании ее из ручья в ручей. В конструкции манипулятора использован пневматический привод.
Отличительной особенностью манипулятора является оригинальное выполнение его пневматического привода. Он состоит из нескольких расположенных соосно пневматических цилиндров, штоки поршней которых закреплены концами последовательно - один в неподвижной траверсе машины, а остальные - в подвижных траверсах; при этом ход каждого цилиндра равняется межручьевому шагу штампа. На чертеже схематически изображен предлагаемый манипулятор.
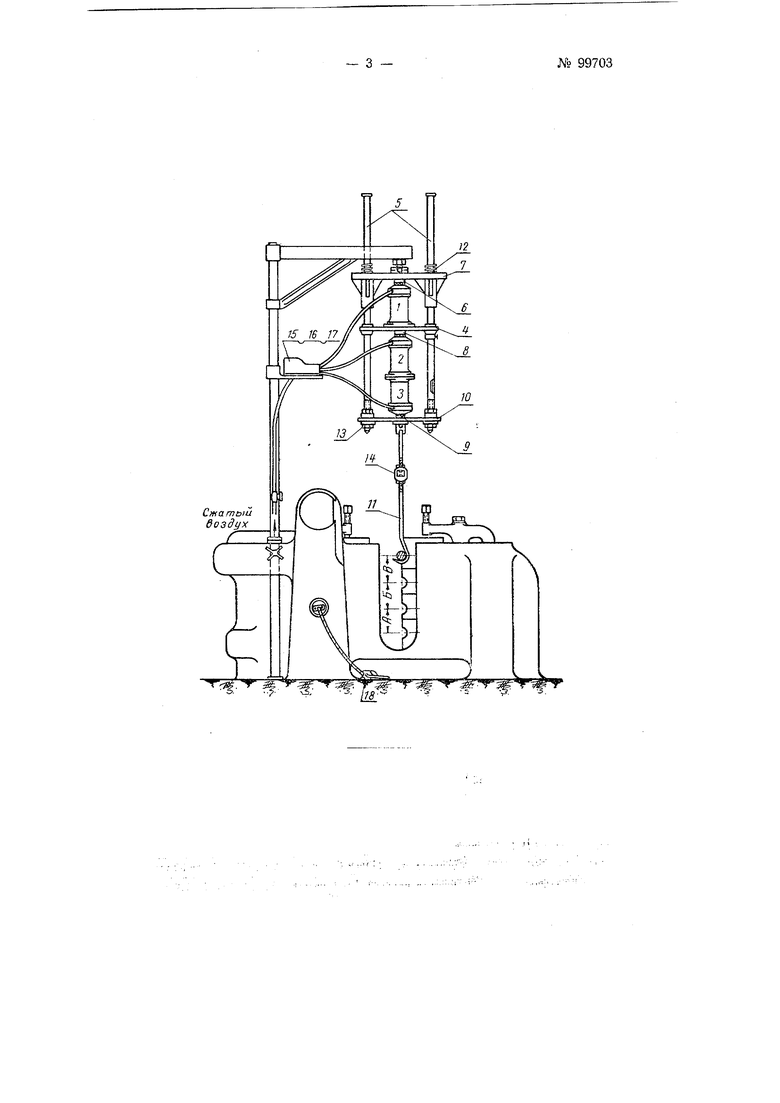
Три пневматических цилиндра 1, 2 и 3 смонтированы соосно; их хода соответственно равны межручьевому шагу А Б и В штампа.
Корпус цилиндра / прикреплен к средней подвижной траверсе 4, которая вместе с ним перемеш,ается по колонкам 5 всегда только на величину хода цилиндра /, т. е. на величину, равную расстоянию В между
первым и вторым ручьями штампа. Шток 6 этого цилиндра укреплен в верхней неподвижной траверсе 7.
Цилиндры 2 и 3 соединены между собой. Шток 8 цилиндра 2 закреплен в средней траверсе 4, а шток 9 цилиндра 5 - в нижней траверсе 10, к которой поворотно прикреплен крючок 11. К нижней траверсе 10 прикреплены две направляющие колонки 5, которые проходят через отверстия траверсы 4 к направляющие втулки траверсы 7.
Направляющие колонки 5, кроме своего основного назначения, выполняют роль стяжных болтов, воспринимающих на себя часть нагрузки при отключенных цилиндрах, т. е. при опущенном в крайнее нижнее положение крючке 11. Пружины 12, надетые на направляющие колонки, служат амортизаторами.
При помощи регулировочных гаек 13 фиксируют нужное нижнее положение крючка И, которое можно устанавливать также и при помогци стяжной муфты 14.
Шток 6 порщня цилиндра / жестко закреплен в неподвижной траверсе 7, а корпус цилиндра прикреплен к средней траверсе 4, поэтому
при впуске воздуха в цилиндр / последний, поднимаясь, тянет за собой траверсу 4 вверх. В свою очередь траверса 4 поднимает траверсу 10 и крючок У/ на величину установленного (для данного штампа) хода цилиндра /.
Подъем траверсы 10 происходит также и при впуске воздуха в цилиндры 2 и 5. В этом случае величина подъема, как и в первом случае, соответствует величине хода цилиндров 2 и 3.
Безразлично, в какой цилиндр сначала впускать воздух - в цилиндр }, 2 или 3 или одновременно во все три цилиндра. Конструкция позволяет осуществить любую последовательность впуска воздуха, обеспечивая при этом нужные ступени подъема.
При выпуске воздуха из цилиндров нижняя траверса 10 и крючок // опускаются вниз.
С задней стороны цилиндров укреплены концевые выключатели (на чертеже не показаны) на расстоянии один от другого, равном соответств.енно величинам Л, и В.
На одной из направляющих колонок 5 укреплен движок, который, перемещаясь вместе с колонкой, замыкает или размыкает электрическую цепь соответствующего золотника 15, 16 или 17. Впуск воздуха в цилиндр, равно как и выпуск, про-: изводится при помощи ножной педали 18.
. В крайнем верхнем положении крючка // движок, касаясь верхнего концевого выключателя, замыкает электрическую цепь золотника 15; при нажатии иа -педаль /5 включается соленоид, .который открывает
выпускное отверстие золотника, и воздух из цилиндра / выпускается в атмосферу, а крючок 11 опускается вниз.
Опустившись вниз, движок касается второго концевого выключателя и замыкает электрическую цепь уже золотника 16. Как и в первом случае нажатием.,на педаль 18 производят выпуск воздуха из цилиндра 2.
Опустившись еще на один шаг, движок касается третьего концевого выключателя и замыкает электрическую цепь золотника 17. Нажав на педаль 18, выпускают воздух из последнего цилиндра 3.
После этого движок окажется в крайнем нижнем положении и коснется четвертого выключателя, который замкнет электрическую цепь сразу всех трех золотников 15, 16 и 17. Нажав на педаль, включают соленоиды «впуск одновременно всех трех золотников, и цикл начинается сначала.
Предмет изобретения
Манипулятор для перекладывания заготовок из ручья в ручей штампа при высадке на горизонтально-ковочной машине с использованием пневматического привода, отличающийся тем, что, с целью механизации цикла работы по высадке, пневматический привод выполнен из нескольких расположенных соосно пневматических цилиндров, штоки поршней которых закреплены концами последовательно - один в неподвижной траверсе машины, а остальные в подвижных траверсах так, что-, бы ход каждого цилиндра равнялся межручьевому шагу.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для УПРАВЛЕНИЯ ПАРОВОЗДУШНЫМКОВОЧНЫМ молотом | 1971 |
|
SU295600A1 |
| Приспособление к горизонтально-ковочным машинам для передачи заготовки из ручья в ручей | 1939 |
|
SU60079A1 |
| Манипулятор штамповочного молота | 1954 |
|
SU103335A1 |
| Перекладчик к горизонтально-ковочной машине | 1972 |
|
SU450634A1 |
| Механизм вращения шпинделя зажимной головки манипулятора | 1978 |
|
SU811588A1 |
| Шагающий болотоход | 2022 |
|
RU2792148C1 |
| В П Т Б | 1973 |
|
SU399387A1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕНОСА ЗАГОТОВОК ПО РУЧЬЯМ ШТАМПА С ВЕРТИКАЛЬНЫМ РАЗЪЕМОМ МАТРИЦ | 2012 |
|
RU2496597C1 |
| Автоматическая линия для изготовления стержней | 1990 |
|
SU1759533A1 |