Изобретение относится к автоматизации процесса многопереходной штамповки сложных деталей и может быть использовано в устройствах для переноса тяжелых заготовок, в том числе заготовок в виде длинномерного прутка или стержня, в многопозиционных ковочных машинах с вертикальным разъемом матриц.
Известно устройство переноса заготовки по позициям многопереходного штампа, содержащее корпус, опоры рычагов, шарнирно соединенных с кареткой, и опоры рычагов, шарнирно сочлененных с балкой, рычаги шарнирно соединены с рычагами привода, кинематически связанного с кривошипным валом пресса, базирующие планки захватов, имеющие две плоскости зажима заготовки, неподвижно прикреплены к каретке, а планки захвата, имеющие одну плоскость зажима, жестко связаны с рычагами, шарнирно соединенными с кареткой, свободные концы рычагов снабжены роликами, взаимодействующими с упорами, причем одни ролики и упоры расположены на одной высоте, а другие ролики и упоры - на другой (см. заявку РФ на изобретение №920064480, МПК B21D 43/00, публ. 10.03.97 г.).
Устройство не адаптировано для переноса тяжелых заготовок в виде длинномерного прутка различных размеров в вертикальной плоскости.
Наиболее близким к заявляемому устройству является устройство для переноса заготовок по ручьям многопозиционного штампа, содержащее механизм захвата в виде крюка, закрепленного на гибкой подвеске, привод механизма захвата в виде первого пневматического цилиндра вертикального подъема с поршнем и штоком, а также средства фиксации механизма захвата на позициях штампа, включающие пазовую ползушку с верхним упором и подпружиненный фиксатор с приводом от поршня второго пневматического цилиндра (см. С.М. Несвит, О.И. Нюнько «Горизонтально-ковочные машины и их автоматизация», Машиностроение, Москва, 1964 г., стр.190-193, фиг.103 - прототип).
Недостатками этого устройства являются:
- большие габариты и масса;
- ограниченные технологические возможности из-за перемещения крюка только сверху вниз;
- большой простой оборудования при переналадке на штамповку новой детали:
- неудобство при ремонтных и наладочных работах.
Изобретение решает задачу создания компактного универсального устройства переноса заготовок с простой адаптацией к различным видам штампов или к различным деталям, или к изменению количества позиций в штампе при оптимальном количестве конструктивных компонентов, а также повышения производительности за счет сокращения времени технологического цикла, расширения технологических возможностей и снижения трудоемкости переналадки.
Технический результат предлагаемого устройства:
- в повышении эффективности работы, надежности и безопасности применения, простоте, удобстве эксплуатации, низкой стоимости;
- в оперативности переналадки на изготовление других деталей;
- в возможности совмещения с различными штампами.
Технический результат изобретения устройства достигается тем, что в устройство для переноса заготовок по ручьям штампа с вертикальным разъемом матриц, содержащее размещенные на стойке механизм перемещения заготовки на гибкой подвеске с пневматическим цилиндром, ползушки, первый пневмоупор и упор передний, введены второй пневмоупор и съемные распорные элементы, механизм перемещения заготовки выполнен с кареткой, причем первый и второй пневмоупоры имеют привод от независимых пневмоцилиндров, каретка выполнена с боковыми упорами и роликом в передней части для крепления гибкой подвески и соединена с пневматическим цилиндром с возможностью горизонтального возвратно-поступательного движения для переноса заготовки по ручьям штампа.
Съемные распорные элементы представляют собой планки разной ширины для обеспечения перемещения заготовки на расстояния между ручьями штампа.
Предпочтительно гибкую подвеску соединить с приводом механизма перемещения заготовки через закрепленные на стойке ролик отклоняющий, натяжной барабан и ролики, закрепленные на кронштейне.
Целесообразно механизм перемещения заготовки выполнить с крюком на гибкой подвеске в виде троса, причем ось крюка выполнить с возможностью установки на оси штамповки в центре масс заготовки.
Предпочтительно в каретке боковые упоры расположить с двух противоположных сторон через пружинные демпфера и имеют фасонные поверхности.
Целесообразно стойку выполненить поворотной с консолью.
При проведении патентных исследований не обнаружены решения, идентичные заявленному, а, следовательно, предложенное решение соответствует критерию "новизна". Сущность изобретения не следует явным образом из известных решений, следовательно, предложенное изобретение соответствует критерию "изобретательский уровень".
На фиг.1 изображено устройство для переноса заготовок по ручьям штампа горячей объемной штамповки с вертикальным разъемом матриц.
Фиг.2 изображает фрагмент корпуса.
На фиг.3 показан разрез А-А на фиг.2.
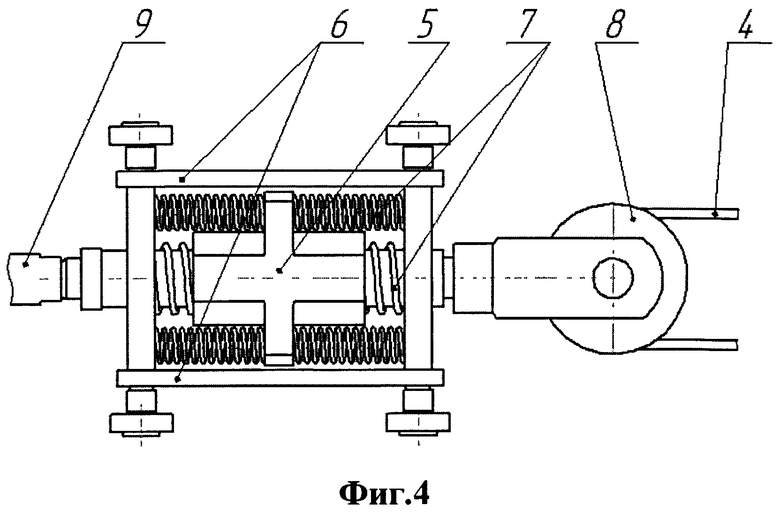
На фиг.4 показан вид сверху каретки.
На фиг.1-4 приняты следующие обозначения:
1 - стойка (выполнена поворотной с консолью);
2 - корпус (на консоле поворотной стойки 1);
3 - крюк;
4 - трос;
5 - каретка;
6 - боковые упоры 6 (каретки 5);
7 - пружинные демпфера (каретки 5);
8 - ролик (каретки 5);
9 - пневматический цилиндр (для горизонтального возвратно-поступательного передвижения каретки 5);
10 - ползушки;
11 - первый пневмоупор;
12 - второй пневмоупор;
13 - упор передний;
14 - первый распорный элемент (съемный);
15 - второй распорный элементы (съемный);
16 - натяжной барабан;
17 - ролик отклоняющий;
18 - ролики (закрепленные на кронштейне);
19 - пневмораспределители;
20 - коробка электрическая распределительная;
21 - первый винт;
22 - второй винт.
Устройство для переноса заготовок по ручьям штампа с вертикальным разъемом матриц содержит стойку 1, выполненную поворотной с консолью и корпусом 2, механизм захвата заготовки в виде крюка 3 на гибкой подвеске в виде троса 4 и его привод, содержащий закрепленные в корпусе 2 каретку 5, выполненную с боковыми упорами 6, пружинными демпферами 7, роликом 8 и соединенную с пневматическим цилиндром 9 с возможностью горизонтального возвратно-поступательного перемещения, ползушки 10, первый и второй пневмоупоры 11, 12 с приводом от независимых пневмоцилиндров, упор 13 передний, первый и второй распорные элементы 14, 15, выполненные съемными в виде планок различной ширины. На поворотной консоли 1 закреплены также натяжной барабан 16, отклоняющий ролик 17, кронштейн с двумя роликами 18, пневмораспределители 19 и коробка 20 электрическая распределительная.
В верхних горизонтальных пазах корпуса 2 устанавливаются первый и второй пневмоупоры 11, 12, первые и вторые распорные элементы 14, 15 в виде планок, передний упор 13, которые фиксируются в осевом направлении первым и вторым винтами 22 и 23. По среднему пазу корпуса 2 установлена каретка 5 с боковыми упорами 6 и роликом 8 в передней части. Для снижения рывков в начале и конце хода боковые упоры 6 соединены с кареткой 5 с двух сторон через пружинные демпфера 7 и имеют фасонные поверхности. Крюк 3 с помощью троса 4 через систему роликов (ролик 17 отклоняющий - ролики 18 - ролик 8 каретки 5 - ролики 18) закрепляется на натяжном барабане 16.
Устройство для переноса заготовок по ручьям штампа работает следующим образом. Первоначально осуществляют наладку. Поворотом стойки 1 и регулировкой ролика 17 отклоняющего вертикальная ось крюка 3 выставляется на ось штамповки в центре масс заготовки. Вращением натяжного барабана 16 крюк 3 выставляется на верхнюю позицию. Нижняя позиция выставляется упором 13 передним с помощью съемных первого и второго распорных элемента 14, 15 и первого винта 21. Первый и второй пневмоупоры 11, 12 устанавливаются на расчетном расстоянии от упора 13 переднего с помощью съемных первого и второго распорных элементов 14, 15 и фиксируются вторым винтом 22. На пульте управления задается алгоритм включения пневмораспределителей 19 выбором трех параметров: количество позиций, направление штамповки, используемые первый, второй пневмоупоры 11, 12 и упор 13 передний.
Перемещение крюка 3 с заготовкой по ручьям штампа осуществляется тросом 4 через систему роликов с помощью пневмоцилиндра 9 с кареткой 5 до первого и/или второго пневмоупоров 11, 12 и упора 13 переднего в соответствии с выбранным алгоритмом работы последовательным нажатием отдельной педали. При включении пневмораспределителей 19 ползушки 10 первого и второго пневмоупоров 11, 12 опускаются и перекрывают ход боковым упорам 6 каретки 5. Последовательное включение первого и/или второго пневмоупоров 11 и 12 позволяет иметь от 2 до 4 фиксированных положений крюка 3.
Предлагаемое устройство позволяет осуществлять перенос заготовок весом до 100 кГ и диаметром до 110 мм.
Горизонтальная конструкция устройство для переноса заготовок по ручьям штампа позволила значительно уменьшить габариты, массу и трудоемкость изготовления, улучшить доступ для наладки и обслуживания. Наличие ролика 17 отклоняющего позволяет работать с заготовками разной длины с подвеской их в центре масс.
Выполнение каретки 5 с двумя пружинными демпферами 7 и фасонной упорной поверхностью позволяет снизить рывки и удары в начале и конце хода. Наличие двух независимых первого и второго пневмоупоров 11, 12 позволяет перестраивать устройство на работу с 2, 3 и 4 ручьевыми штампами с различным направлением штамповки.
Предлагаемое устройство отличается малой массой и компактностью, широкими технологическими возможностями, оперативностью переналадки на заготовки различных размеров и возможностью использования в штампах горячей объемной штамповки с вертикальным разъемом матриц различной конструкции.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ ЗАГОТОВОК ИЗ ШТАМПОВ РАДИАЛЬНОЙ ШТАМПОВКИ | 1974 |
|
SU440200A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ГОРЯЧЕЙ ОБЪЕМНОЙ ШТАМПОВКИ ПРЕИМУЩЕСТВЕННО ЗВЕНЬЕВ ГУСЕНИЧНОЙ ЦЕПИ | 1992 |
|
RU2035254C1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| Гибкий производственный модуль для листовой штамповки | 1988 |
|
SU1667994A1 |
| АВТОМАТ ИЗГОТОВЛЕНИЯ ИЗ ПРУТКА, ПОСРЕДСТВОМ ДВУСТОРОННЕЙ ГИБКИ, ДЕТАЛЕЙ ПРОСТРАНСТВЕННОЙ ФОРМЫ ТИПА КЛЕММ РЕЛЬСОВЫХ СКРЕПЛЕНИЙ | 2009 |
|
RU2412772C2 |
| МЕХАНИЗМ ЗАГРУЗКИ | 1967 |
|
SU195289A1 |
| АВТОМАТИЗИРОВАННАЯ ЛИНИЯ ГОРЯЧЕЙ ШТАМПОВКИ КРУПНЫХ ПОКОВОК С ВЫТЯНУТОЙ ОСЬЮ | 2003 |
|
RU2262436C2 |
| Автоматизированный комплекс для многопереходной штамповки | 1986 |
|
SU1349851A1 |
| ШТАМП ДЛЯ ВЫСАДКИ УТОЛЩЕНИЙ НА СТЕРЖНЕВЫХ ЗАГОТОВКАХ | 1991 |
|
RU2006328C1 |
| Подающее устройство к горизонтальноковочной машине | 1976 |
|
SU574264A1 |



Изобретение относится к автоматизации процесса многопереходной штамповки сложных деталей и может быть использовано для переноса тяжелых заготовок, в том числе заготовок в виде длинномерного прутка или стержня, в многопозиционных ковочных машинах с вертикальным разъемом матриц. Устройство содержит стойку, на которой размещен механизм перемещения заготовки на гибкой подвеске. Упомянутый механизм включает пневматический цилиндр и каретку. Каретка выполнена с боковыми упорами и с расположенным в ее передней части роликом для крепления гибкой подвески. Каретка соединена с пневматическим цилиндром с возможностью горизонтального возвратно-поступательного движения. На стойке также размещены ползушки, первый и второй пневмоупоры, упор передний и съемные распорные элементы. Первый и второй пневмоупоры имеют привод от независимых пневмоцилиндров. В результате повышается надежность устройства, обеспечивается безопасность и удобство его эксплуатации, упрощается его переналадка для переноса различных заготовок. 5 з.п. ф-лы, 4 ил.
1. Устройство для переноса заготовок по ручьям штампа с вертикальным разъемом матриц, содержащее размещенные на стойке механизм перемещения заготовки на гибкой подвеске с пневматическим цилиндром, ползушки, первый пневмоупор и упор передний, отличающееся тем, что оно снабжено вторым пневмоупором и съемными распорными элементами, причем механизм перемещения заготовки выполнен с кареткой, первый и второй пневмоупоры имеют привод от независимых пневмоцилиндров, а каретка выполнена с боковыми упорами и с расположенным в ее передней части роликом для крепления гибкой подвески и соединена с пневматическим цилиндром с возможностью горизонтального возвратно-поступательного движения для переноса заготовки по ручьям штампа.
2. Устройство по п.1, отличающееся тем, что съемные распорные элементы выполнены в виде планок разной ширины для обеспечения перемещения заготовки на расстояния между ручьями штампа.
3. Устройство по п.1, отличающееся тем, что гибкая подвеска соединена с приводом механизма перемещения заготовки через закрепленные на стойке ролик отклоняющий, натяжной барабан и ролики, закрепленные на кронштейне.
4. Устройство по п.1, отличающееся тем, что механизм перемещения заготовки выполнен с крюком на гибкой подвеске в виде троса, причем ось крюка выполнена с возможностью установки на оси штамповки в центре масс заготовки.
5. Устройство по п.1, отличающееся тем, что боковые упоры каретки расположены с двух противоположных сторон через пружинные демпферы и имеют фасонные поверхности.
6. Устройство по п.1, отличающееся тем, что стойка выполнена поворотной с консолью.
| НЕСВИТ С.М., НЮНЬКО О.И | |||
| Горизонтально-ковочные машины и их автоматизация | |||
| - М.: Машиностроение, 1964, с.190-193, фиг.103 | |||
| Устройство для переноса заготовок по позициям матричного блока горизонтально-ковочной машины | 1988 |
|
SU1637928A1 |
| Манипулятор для переноса заготовок | 1982 |
|
SU1074651A1 |
| Манипулятор к прессу | 1987 |
|
SU1489917A1 |
| Прицеп валочно-пакетирующей машины для длинномерных грузов | 1980 |
|
SU927588A1 |
| СПОСОБ ИЗОЛЯЦИИ ПРИТОКА ПЛАСТОВЫХ ВОД В СКВАЖИНУ | 1995 |
|
RU2108454C1 |

