Изобретение относится к измерительной технике и автоматике и может быть использовано для ввода информации в бортовых ;мультиплексированных системах управления летательных аппаратов.
Известен индуктивный бесконтактный переключатель, содержасдий nooipянный магнитт выполненный в виде полого цилиндра, внутри которого расположены сердечник из магнитомягкого материала, на котором размедены сигнальные обмотки, механизм привода и возвратную пружину l.
Недостатком этого устройства является нестабильность порога срабатывания, обусловленная существенной зависим6,стью величины генераторной .ЭДС от скорости перемещения подвйжного элемента.
Известен датчик положения, содержащий корпус и расположенные в нем постоянный магнит, связанный с механизмом привода, два тороидальных- . ферромагнитных сердечника с сигнальными обмотками и соединенными последов-атёльно обмотками возбуждения 1,2j.
Недостатком известного устройства является.то, что постоянный магнит при перемещении из одного положенияв другое не контактирует с сердечниками. Это приводит, с одной стороны, к снижению помехозащищенности устройства, а с другой - к снижению точности срабатывания за счет гистерезиса. Наличие зазора приводит также к увеличению габаритов постоянного магнита.
Цель изобретения - повышение точности датчика полложения.
10
Цель достигается тем, что в датчик положения, содержаьдай корпус с расположенным в нем постоянным магнитом, механизм привода и два ферромагнитных сердечника с сигнальными
15 обмотками, введены второй постоянный магнит, Ф-образный магнитопровод с двумя.диаметрально расположенными зазорами, упрайля1одая обмотка и два дополнительных ферромагнитных сер20дечника с сигнальными обмотками, при этом сердечники выполнены броневыми, механизм привода выполнен в виде коромысла, ось вращения которого расположена в плоскости Ф-образного
25 магнитопровода, размещенного в корпусе, и перпендикулярна цеитральному сердечнику магнитопровода, управляющая обмотка расположена на центральном сердечнике, броневые сердеч30ники расположены попарно в зазорах
Ф-образного магнитопровода, причем постоянные магниты размещены между сердечниками соответствующей пары и закреплены на концах коромысла.
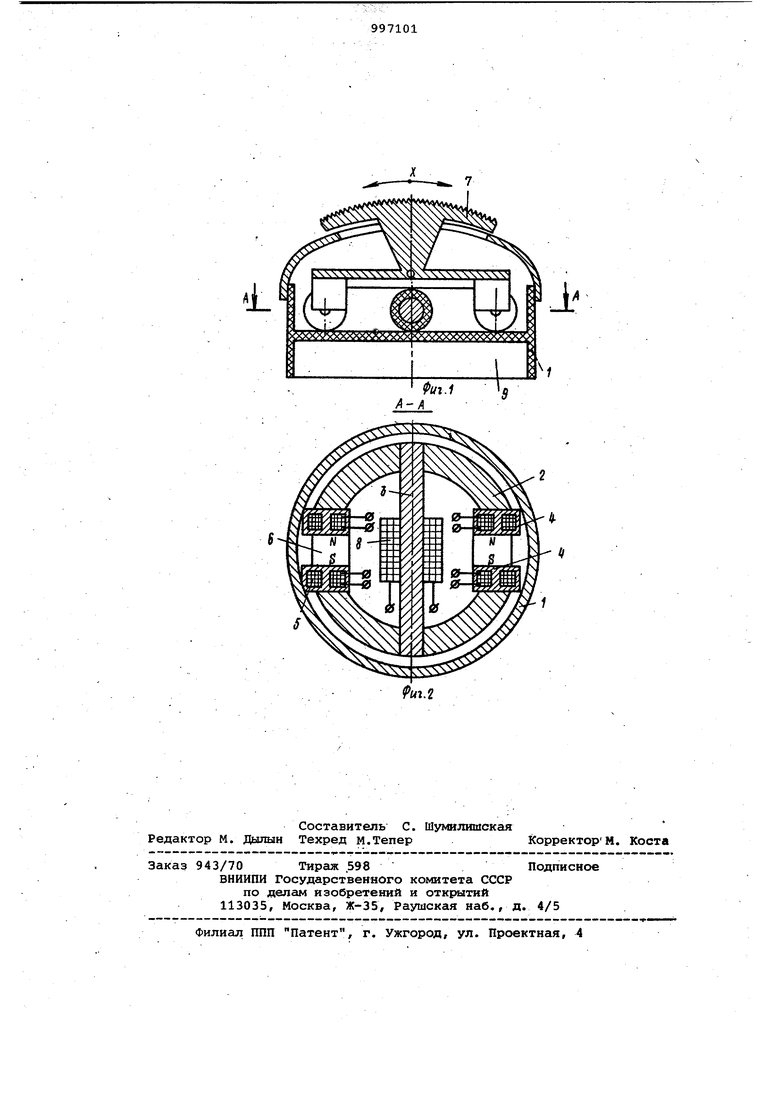
На фиг. 1 изображена конструкция датчика положения; на фиг. 2 - разрез А-А на фиг. 1,
В корпусе 1 датчика, выполненном из диамагнитного материала, установлен Ф-образный магнитопровод 2 с центральным сердечником 3. В магни|топроводе имеются два диаметрально расположенных зазора, в которых рас|положены броневые сердечники 4 с сигнальными обмотками 5. Между броневыми сердечниками 4 установлены постоянные магниты 6, связанные с механизмом привода 7. При этом на центральный сердечник 3 намотана управляющая обмотка 8.-в корпусе 1 имеется полость 9 для размещения элементов электронной схемы, не указанных на чертеже.
Устройство работает следующим образом.
На чертеже датчик показан в нейтральном положении. При перемещении механизма привода 7 влево или вправо постоянные магниты 6 перемещаются между плоскими торцовыми основаниями броневых сердечников 4, в которых циркулируют переменные магнит,ные потоки,
Под действием постоянного магнитного потока подвижных магнитов 6 существенно меняются магнитные сопротивления броневых сердечников 4, при этом индуктивности сигнальных обмоток изменяются.
Изменение индуктивностей приводит к изменению колебательного режима LC-контуров в цепях автогенераторов, к которым подключены сигнальные обмсзтки броневых сердечников 4. Амплитууца выходных напряжений автогенераг оров служит мерой перемещения постоянных магнитов 6 вдоль сигнальных Э1б аоток 5, Порог срабатывания датчика регулируется величиной постояннот-о тока в управляющей обмотке 8, осуществляющей подмагничивание броневых сердечников 4.
Таким образом, предлагаемой датчик положения обладает более высокой точностью срабатывания благодаря наличию замкнутой магнитной систелы и позволяет использовать постоянные J магниты меньших габаритов, т.е. является более экономичным. Наличие замкнутой магнитной системы обеспечивает также снижение температурной погрешности устройства. Порог срабатывания предлагаемого датчика положения может быть изменен в процессе работы, а механическая синхронизация выходных сигналов датчика сущейтвенным образом упрощает и повышает точность управления узлами
летательных аппаратов.
Формула изобретения
Датчик положения, содержащий корпус с расположенным в нем постоянным
магнитом, механизм привода и два Фе1 ромагнитных сердечника с сигнальными обмотками, отличающийс я тем, что, с целью повышения точности, в него введены второй постоянный магнит, Ф-образный магнитопровод с двумя диаметрально расположенными зазорами, управляющая обмотка и два дополнительных ферро-. магнитных сердечника с сигнальными
обмотками, при этом сердечники вытолнены броневыми, механизм привода выполнен в виде короьмсла, ось вращения которого расположена в плоскости Ф-образного магнитопровода,
размещенного в корпусе, и перпенди-г кулярна центральнЬму сердечнику магнитопровода, управляющая обмотка расположена на центральном сердечнике, броневые сердечники расположены попарно в зазорах Ф-образного магнитопровода, причем постоянные магниты размещены между сердечниками соответствующей пары и закреплены .на концах коромысла.
. Источники информации,
г инятые во внимание при экспертизе
1.Патент Великобритании 1346128, кл. Н 38, 1972.
2.Патент США № 3825909, кл. 340-174, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля положения рабочих органов механизмов | 1978 |
|
SU744699A1 |
| Бесконтактный магниточувствительныйдАТчиК | 1979 |
|
SU851532A1 |
| Преобразователь для бесконтактной передачи сигналов постоянного тока с вращающегося объекта | 1981 |
|
SU1017927A1 |
| Магнитно-полупроводниковый датчик положения | 1985 |
|
SU1335802A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МГНОВЕННОЙ СКОРОСТИ ВРАЩЕНИЯ | 2002 |
|
RU2227304C2 |
| Устройство для контроля положения рабочих органов механизмов | 1982 |
|
SU1023374A1 |
| ДАТЧИК СКОРОСТИ | 2006 |
|
RU2327171C2 |
| Линейный двигатель с подвижным магнитом | 2016 |
|
RU2648682C2 |
| Поляризованный электромеханический преобразователь для электрочасов | 1984 |
|
SU1277061A1 |
| ТАХОМЕТР ЧАСТОТНЫЙ ЯЛОВЕГИ | 2004 |
|
RU2258228C1 |