Изобретение относится к авиационной технике, в частности к системам управления грузом и его ориентации в пространстве, например опорой линии электропередачи (ЛЭП) и т. п. , с вертолета, и может быть использовано при монтажных работах по установке грузов, подвешенных на гибкой связи к вертолету, преимущественно с одной передней стойкой шасси.
Наиболее близкой по технической сущности к предлагаемой является система управления грузом, подвешенным на внешней подвеске к вертолету, содержащая расположенную в подвесной кабине пилота ручку продольно-поперечного управления, связанную посредством двух систем тяг с тарелью автомата перекоса несущего винта вертолета, причем эта ручка расположена в продольной плоскости симметрии вертолета, проходящей через продольную ось вертолета, между двумя передними стойками шасси.
Недостатком данной системы является недостаточное удобство пользования при управлении грузом на внешней подвеске, обусловленное тем, что ручка продольно-поперечного управления расположена в подвесной кабине между двумя передними стойками колес шасси в плоскости, проходящей через продольную ось вертолета, что не обеспечивает управления подвесным грузом с вертолетов с одной передней стойкой шасси и низкорасположенным фюзеляжем, например, с вертолета МИ-26, который имеет в два раза большую грузоподъемность (20 т вместо 10 т) по сравнению с вертолетом МИ-10К. Трудности возникают из-за того, что нельзя расположить в плоскости, проходящей через продольную ось вертолета, подвесную кабину и переднюю стойку шасси на одном и том же месте, в смещение расположения подвесной кабины с ручкой продольно-поперечного управления в сторону носовой части вертолета относительно передней стойки колеса шасси ограничивает из-за последней зону обзора пилоту и смещение подвесной кабины с ручкой продольно-поперечного управления в сторону хвостовой части вертолета относительно передней стойки колеса шасси неприемлемо из-за незначительного расстояния менее 0,5 м между фюзеляжем вертолета и землей в наземном положении вертолета, что также не обеспечивает необходимую зону обзора пилоту при управлении грузом, что в конечном счете сужает парк используемых вертолетов для монтажных работ.
Целью изобретения является повышение удобства пользования при расширении парка используемых вертолетов.
Поставленная цель достигается тем, что в системе управления грузом, подвешенным на внешней подвеске к вертолету, содержащей расположенную в подвесной кабине пилота ручку продольно-поперечного управления, связанную посредством двух систем тяг с тарелью автомата перекоса несущего винта вертолета, согласно изобретению ручка продольно-поперечного управления расположена на расстоянии от продольной плоскости симметрии вертолета, равном 0,2-0,6 максимального диаметра фюзеляжа вертолета, а расстояние от ручки продольно-поперечного управления до носа вертолета равно 0,08-0,15 длины вертолета.
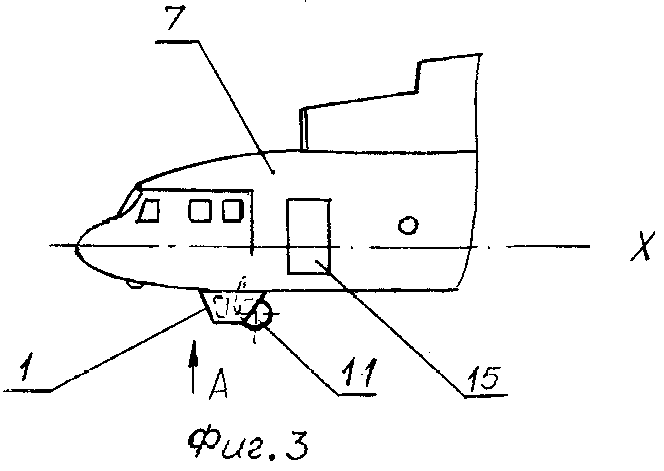
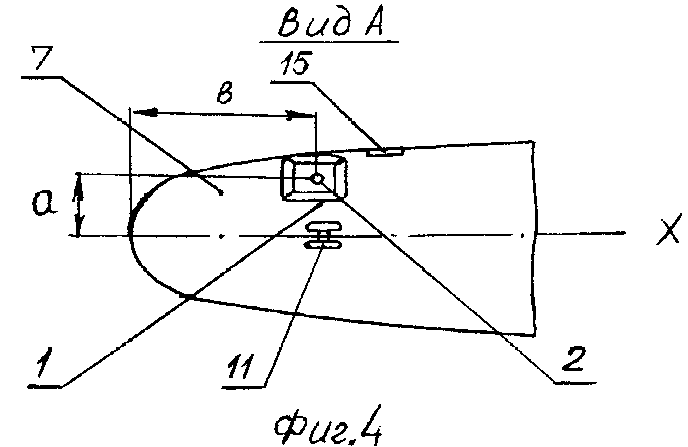
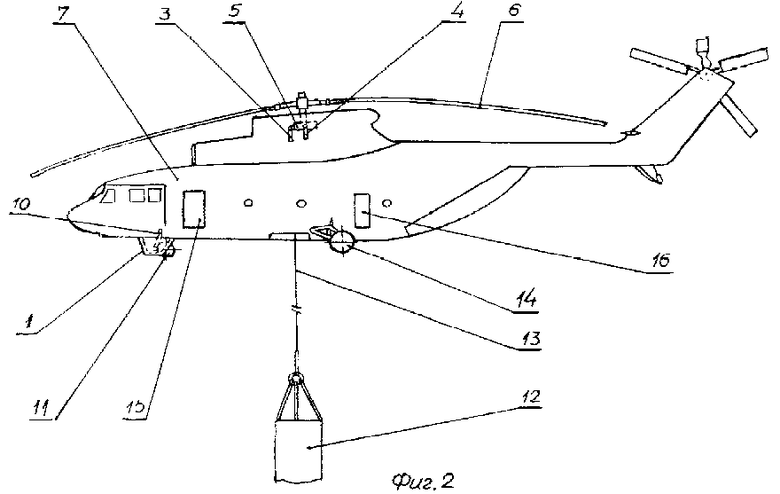
На фиг. 1 изображен общий вид системы управления подвесным грузом; на фиг. 2 - конструкция вертолета с подвесной кабиной и подвесным грузом; на фиг. 3 - размещение подвесной кабины с ручкой продольно-поперечного управления в носовой части вертолета; на фиг. 4 - вид по стрелке А на фиг. 3; на фиг. 5 - схема обоснования пределов размещения ручки продольно-поперечного управления до продольной плоскости симметрии вертолета; на фиг. 6 - схема обоснования пределов размещения ручки продольно-поперечного управления до носа вертолета.
Система управления грузом, подвешенным на внешней подвеске к вертолету, содержит расположенную в подвесной кабине 1 пилота ручку 2 продольно-поперечного управления, связанную посредством двух систем тяг 3,4 с тарелью 5 автомата перекоса несущего винта 6 вертолета. Ручка 2 продольно-поперечного управления расположена на расстоянии от продольной плоскости симметрии вертолета, проходящей через продольную ось Х, равном а= 0,2 - 0,6 максимального диаметра фюзеляжа 7 вертолета, а расстояние от ручки 2 продольно-поперечного управления до носа вертолета равно в= 0,08-0,15 длины вертолета. Ручка 2 продольно-поперечного управления связана через участки двух систем тяг 3,4 с ручками 8,9 продольно-поперечного управления левого и правого пилотов в кабине вертолета.
Подвесная кабина 1 пилота (см. фиг. 2) расположена вблизи передней стойки 10 колеса 11 шасси, а подвесной груз 12, например опора ЛЭП, закреплен на гибкой связи 13 к фюзеляжу 7 вертолета вблизи его центра масс и задних стоек колес 14 шасси. В носовой и хвостовой частях вертолета предусмотрены двери 15, 16 для покидания экипажем вертолета.
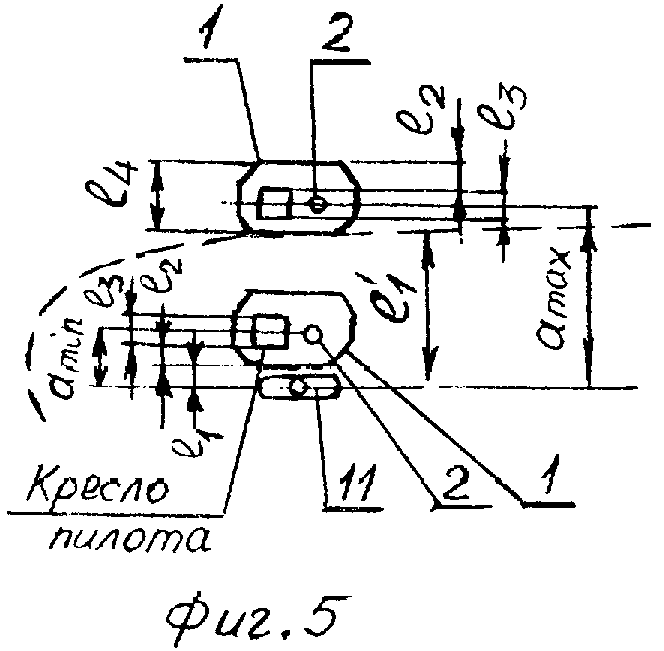
Для обоснования пределов расположения ручки продольно-поперечного управления от продольной плоскости симметрии вертолета используем следующие соображения (см. фиг. 5). Максимальное расстояние между продольной плоскостью симметрии вертолета и подвесной кабиной должно быть с учетом максимальных размеров передней стойки шасси не менее l1= 25 мм, а минимальное расстояние между подвесной кабиной и креслом пилота в ней не менее l2= 10 см, габариты креста исхода из габаритов пилота в плечах не более l3= 70 см.
Отсюда минимальное расстояние от продольной плоскости симметрии вертолета до оси, проходящей через ручку продольно-поперечного управления в подвесной кабине пилота, определяется из соотношения
amin= l1+l2+  = 25+10+
= 25+10+  = 70 см ,
= 70 см ,
Максимальное расстояние между продольной плоскостью симметрии вертолета и подвесной кабиной определяется исходя из величины половины диаметра фюзеляжа вертолета и равно для МИ-26 l1I ≈1,5 м ≈ 150 см. Ширина подвесной кабины лежит в пределах l4 ≈ 100 см.
Таким образом, максимальное расстояние от продольной плоскости симметрии вертолета до оси, проходящей через ручку продольно-поперечного управления в подвесной кабине пилота, определяется из соотношения
amax= l +l4-l2-
+l4-l2-  = 150+100-10-
= 150+100-10-  = 205 см .
= 205 см .
Пределы расположения ручки продольно-поперечного управления от продольной плоскости симметрии вертолета определяются как отношение минимального и максимального расстояний между продольной плоскостью симметрии вертолета и ручкой продольно-поперечного управления к максимальному диаметру фюзеляжа вертолета (для МИ-26 dфюз.max= 3,5 м = 350 м)  =
=  = 0.2 ;
= 0.2 ;  =
=  ≈0,6;
≈0,6;
a=  ÷
÷  = 0.2÷0.6 .
= 0.2÷0.6 .
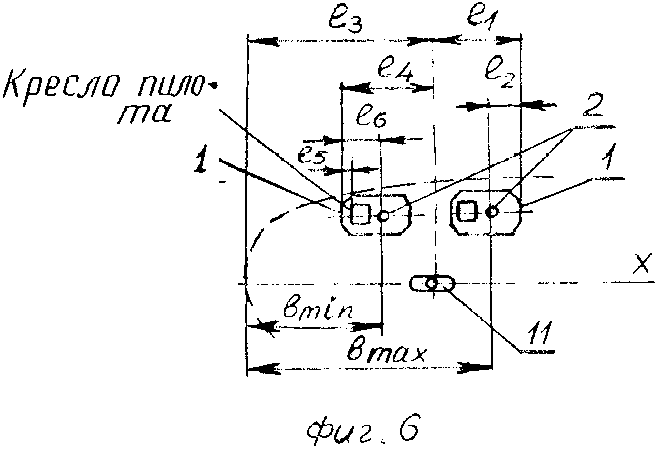
Пределы размещения ручки продольно-поперечного управления до носа вертолета определяются исходя из следующих соображений (см. фиг. 6). Минимальное расстояние между носом вертолета и поперечной осью, проходящей через ручку продольно-поперечного управления, ищем с учетом необходимости расположения подвесной кабины пилота в районе передней стойки колеса шасси и исходя из предельных отклонений в размещении подвесной кабины с ручкой продольно-поперечного управления в направлении продольной оси вертолета относительно передней стойки колеса шасси. Размер l1 от оси, проходящей через переднюю стойку колеса шасси, до края подвесной кабины при ее смещении в сторону хвостовой части вертолета не должен превышать l1 ≅ 120 см для обеспечения безопасности при аварийном покидании экипажем вертолета через переднюю дверь сбоку фюзеляжа вертолета и из-за уменьшения расстояния между нижней частью фюзеляжа вертолета и касательной к колесам шасси. Размер l4 от оси, проходящей через переднюю стойку колеса шасси, до другого края подвесной кабины при ее смещении в сторону носовой части фюзеляжа вертолета не должен превышать l4 ≅ 200 см из-за ограничения ввиду размещения аппаратуры в носовой части вертолета и значительного сужения размеров диаметра фюзеляжа в носовой части ближе к носу вертолета.
Ручка продольно-поперечного управления расположена на расстоянии l2 ≥ 30 см от края подвесной кабины при смещении подвесной кабины в сторону хвостовой части. Ручка продольно-поперечного управления расположена на минимальном расстоянии l6 ≥ 80 см от края подвесной кабины при смещении подвесной кабины в сторону носовой части фюзеляжа. Минимальное расстояние от ручки продольно-поперечного управления до носа вертолета с учетом расстояния от передней стойки колеса шасси до носа вертолета МИ-26 l3= 400 cм и l5= 10 см определяется из соотношения
bmin= l3-l4+l5+l6= 400-200+10+80= 290 см.
Максимальное расстояние от ручки продольно-поперечного управления до носа вертолета определяется из соотношения
bmax= l3+l1-l2= 400+120-30= 490 см.
Пределы размещения ручки продольно-поперечного управления до носа вертолета по отношению к длине вертолета (lверт ≈ 33,7 м ≈ 3370 см).
 =
=  0.08
0.08 =
=  0.15;
0.15;
b= ÷
÷ 0.08÷0.15.
0.08÷0.15.
Устройство работает следующим образом.
При установке груза 12, например опоры ЛЭП, управление грузом передается с ручки продольно-поперечного управления левого 8 (правого 9) пилота на ручку 2 продольно-поперечного управления пилота в подвесной кабине 1. Пилот, находящийся в подвесной кабине 1, визуально определяет отклонение груза 12 относительно заданной точки пространства, в которой необходимо закрепить груз 12. Отклоняя ручку 2 продольно-поперечного управления в продольном и поперечном направлениях, пилот через системы тяг 3,4 отклоняет тарель 5 автомата перекоса и плоскость вращения несущего винта 6 вертолета. Подъемная сила от несущего винта вертолета создает моменты в его продольной и боковой плоскостях и перемещает груз 12 в заданную точку пространства.
Предложенная система управления грузом, подвешенным на внешней подвеске к вертолету, позволяет повысить удобство пользования при расширении парка используемых вертолетов при проведении монтажных работ по установке грузов, подвешенных на гибкой связи к вертолету.
В связи с тем, что вертолеты с одной передней стойкой шасси и низкорасположенным от земли фюзеляжем обычно имеют в два раза большую грузоподъемность по сравнению с вертолетами с двумя передними стойками шасси и высокорасположенным фюзеляжем (в качестве примера можно привести вертолеты типа МИ-26 и МИ-10К), то предложенная система управления обеспечивает управления грузом значительно большей массы по сравнению с известной системой управления. (56) Вертолет Ми-10К, Планер и силовая установка. Инструкция по технической эксплуатации. Книга 1, ч. 1 и 2, М. , 1974, с. 284, рис. 60.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КОНТРОЛЯ ПОЛОЖЕНИЯ ГРУЗА, ПОДВЕШЕННОГО НА ГИБКОЙ СВЯЗИ К ВЕРТОЛЕТУ ПРИ МОНТАЖНЫХ РАБОТАХ | 1992 |
|
RU2015075C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ БУКСИРУЕМОГО ТЕЛА | 1992 |
|
RU2006429C1 |
| СИСТЕМА ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА К ВЕРТОЛЕТУ | 1992 |
|
RU2015074C1 |
| СИСТЕМА ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА К ВЕРТОЛЕТУ | 1992 |
|
RU2030332C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МОДУЛЯ И НАПРАВЛЕНИЯ ВЕКТОРА СКОРОСТИ ПОТОКА | 1992 |
|
RU2029958C1 |
| ВЕРТОЛЕТНАЯ РОБОТИЗИРОВАННАЯ УНИВЕРСАЛЬНАЯ СИСТЕМА (ВРУС) | 2020 |
|
RU2754643C1 |
| Буксируемая мишень для имитации летательных аппаратов | 1990 |
|
SU1837036A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПОТОКА В ОБЛАКАХ | 1992 |
|
RU2015072C1 |
| ВЕРТОЛЕТ ДЛЯ КРАНОВО-МОНТАЖНЫХ РАБОТ | 2007 |
|
RU2341410C1 |
| КОМБИНИРОВАННЫЙ ВЕРТОЛЕТ | 1994 |
|
RU2089456C1 |
Изобретение относится к авиационной технике и может быть использовано при монтажных работах по установке грузов, подвешенных на гибкой связи к вертолету, преимущественно с одной передней стойкой шасси. Цель - повышение удобства пользования при расширении парка используемых вертолетов. Система управления грузом, подвешенным на внешней подвеске к вертолету, содержит ручку 2 продольно-поперечного управления, расположенную в подвесной кабине 1 пилота, и ручки 8, 9, расположенные в основной кабине пилота. Ручки 1, 8 и 9 связаны системой тяг 3 и 4 с тарелью 5 автомата 6 перекоса несущего винта 6 вертолета, на фюзеляже 7 которого расположена дверь 15. При этом ручка 2 расположена от продольной плоскости симметрии фюзеляжа 7 вертолета на расстоянии, равном 0,2 - 0,6 максимального его диаметра, а расстояние от ручки 2 до носа фюзеляжа 7 равно 0,08 - 0,15 его длины. 6 ил.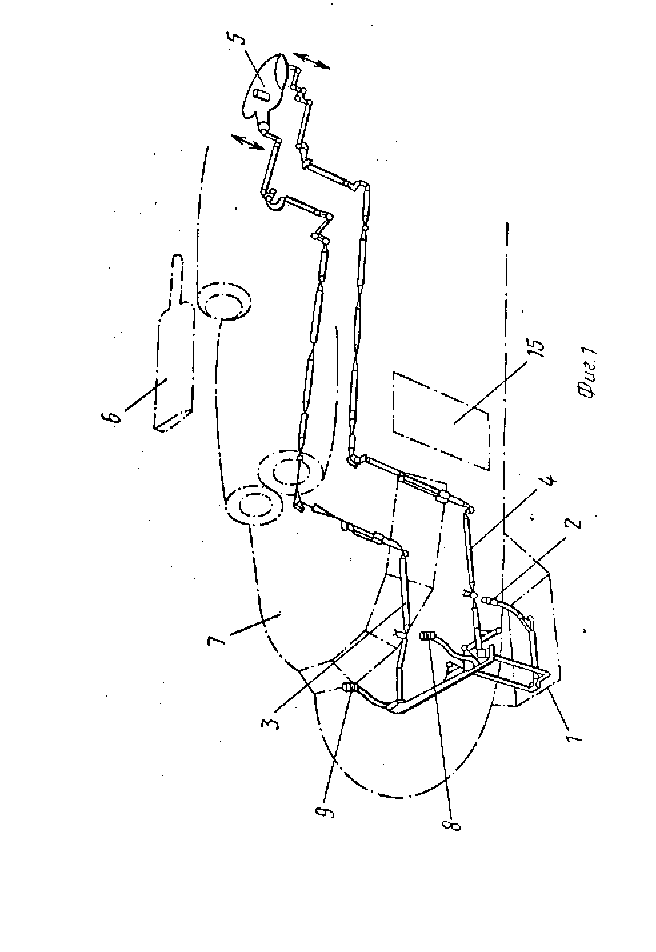
СИСТЕМА УПРАВЛЕНИЯ ГРУЗОМ, ПОДВЕШЕННЫМ НА ВНЕШНЕЙ ПОДВЕСКЕ К ВЕРТОЛЕТУ, содержащая расположенную в подвесной кабине пилота ручку продольно - поперечного управления, связанную посредством двух систем тяг с тарелью автомата перекоса несущего винта вертолета, отличающаяся тем, что ручка продольно - поперечного управления расположена на расстоянии от продольной плоскости симметрии вертолета, равном 0,2 -- 0,6 максимального диаметра фюзеляжа вертолета, а расстояние от ручки продольно - поперечного управления до носа вертолета равно 0,08 -- 0,15 длины вертолета.
