Изобретение относится к области авиационной техники и может быть использовано на вертолетах при проведении монтажных работ.
Известна система внешней подвески груза к вертолету, содержащая ферму-подвеску, грузовой трос, грузовые стропы с захватами в виде крюков, силовой замок и замок-рвушку, недостатками которой являются низкие эксплуатационные характеристики и недостаточное удобство пользования из-за невозможности ориентирования захватов в широком диапазоне углов в горизонтальной плоскости и автоматического захвата груза.
Наиболее близкой по технической сущности к предлагаемой является система внешней подвески груза к вертолету, содержащая закрепленные на вертолете посредством элементов соединения, выполненных в виде грузовых строп, захваты.
Недостатками данной системы, как и аналога, являются недостаточно хорошие эксплуатационные характеристики, обусловленные невозможностью ориентирования захватов в широком диапазоне углов в горизонтальной плоскости с автоматическим захватом груза. Необходимость ориентирования захватов в горизонтальной плоскости при монтажных работах объясняется тем, что вертолет зависает над местом установки груза по направлению вектора скорости ветра из-за наиболее благоприятных характеристик устойчивости, при этом захваты могут быть ориентированы относительно груза с отклонением от требуемого положения, что не обеспечивает автоматического захвата в широком диапазоне углов в горизонтальной плоскости. Доворот груза для его захвата с помощью вертолета ограничен диапазоном углов ±45о из-за неустойчивости вертолета с грузом на внешней подвеске, обусловленной положением вертолета относительно вектора скорости. Кроме того, возникают трудности с захватом груза при значительной высоте и размерах последнего со значительной потерей времени.
Целью изобретения является улучшение эксплуатационных характеристик системы за счет автоматического захвата произвольно расположенного груза.
Поставленная цель достигается тем, что система внешней подвески груза к вертолету, содержащая закрепленные на вертолете посредством элементов соединения захваты, согласно изобретению снабжена опорой, узлом ориентирования груза в горизонтальной плоскости и узлом изменения положения захватов относительно груза, при этом узел ориентирования груза в горизонтальной плоскости включает силовую балку и привод, выполненный в виде двух движителей, узел изменения положения захватов относительно груза включает четыре привода, причем опора и силовая балка прикреплены к вертолету, силовая балка выполнена с возможностью поворота относительно опоры, элементы соединения захватов прикреплены к силовой балке с возможностью поворота относительно нее и выполнены из жестких складных секций, при этом два привода узла изменения положения захватов закреплены на силовой балке и связаны с одними секциями элементов соединения захватов, на которых расположены движители привода узла ориентирования груза в горизонтальной плоскости и два других привода узла изменения положения захватов, связанных с другими секциями элементов соединения захватов.
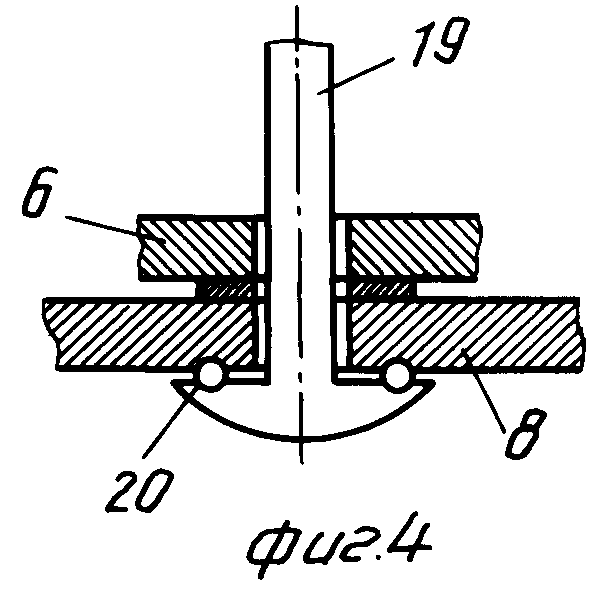
На фиг. 1 показан общий вид системы в изометрии; на фиг. 2 - общий вид системы в посадочном положении вертолета; на фиг. 3 - общий вид системы в режиме висения над захватываемом грузом; на фиг. 4 - конструкция крепления силовой балки и опоры к вертолету; на фиг. 5 - принципиальная электрическая схема управления движителями.
Система внешней подвески груза к вертолету содержит закрепленные на вертолете 1 посредством элементов соединения 2, 3 захваты 4, 5. Система снабжена опорой 6, узлом ориентирования груза в горизонтальной плоскости и узлом изменения положения захватов 4, 5 относительно груза 7.
Узел ориентирования груза в горизонтальной плоскости включает силовую балку 8 и привод, выполненный в виде движителей 9, 10.
Узел изменения положения захватов относительно груза включает четыре привода 11, 12, 13, 14.
Опора 6 и силовая балка 8 прикреплены к вертолету 1 соответственно с помощью, например, растяжек 15, 16, 17, 18 и вала 19 с гибкой связью (не показана). Вал 19 может являться одновременно и опорой 6 при его жестком креплении к вертолету 1.
Силовая балка 8 выполнена с возможностью поворота относительно опоры 6 по поверхности опорных шариков 20 (фиг. 4).
Элементы соединения 2, 3 захватов прикреплены к силовой балке 8 с возможностью поворота относительно нее и выполнены из жестких складных секций 21, 22, 23, 24, при этом приводы 11, 12 узла изменения положения захватов закреплены на силовой балке 8 и связаны с секциями 21, 22 элементов соединения захватов, на которых расположены движители 9, 10 привода узла ориентирования груза в горизонтальной плоскости и приводы 13, 14 узла изменения положения захватов.
Движители 9, 10 (фиг. 5) выполнены в виде двигателей 25, 26 с воздушными винтами 27, 28, 29, 30 на их валах, причем обмотки 31, 32 управления двигателями соединены через тумблер 33 с нейтральным положением с источником питания 34, например, постоянного тока.
Управление приводами 11, 12, 13, 14 и двигателями 25, 26 осуществляется с борта вертолета 1, причем напряжение от источника питания 34 подается на приводы 11, 12, 13, 14 через дополнительный выключатель (не показан).
Устройство работает следующим образом.
Вертолет 1 с захватами 4, 5 на элементах соединения 2, 3 с наибольшим расстоянием между последними зависает над грузом 7, установленным на земле, по направлению вектора скорости ветра. После подачи напряжения от источника питания 34 через тумблер 33 на обмотки 31, 32 двигателей 25, 26 раскручиваются воздушные винты 27, 28, 29, 30, которые создают вращающий момент в горизонтальной плоскости. После разворота силовой балки 8 на заданную величину напряжение от источника 34 отключается. Захваты 4, 5 ориентированы относительно стыковочных узлов груза 7 с требуемой точностью. Подают напряжение от источника питания 34 на приводы 11, 12, 13, 14, которые перемещают секции 21, 22 и секции 23, 24 для захвата груза 7. После захвата груза 7 напряжение на приводы 11, 12, 13, 14 отключается. Груз 7 поднимается с помощью системы внешней подвески в воздух и транспортируется в заданный район.
Предложенная система внешней подвески груза к вертолету позволяет улучшить эксплуатационные характеристики системы за счет автоматического захвата произвольно расположенного груза, а это позволяет сократить затраты на подцепку груза к вертолету, причем наземные службы выполняют лишь функцию контроля за процессом захвата груза.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА К ВЕРТОЛЕТУ | 1992 |
|
RU2030332C1 |
| Буксируемая мишень для имитации летательных аппаратов | 1990 |
|
SU1837036A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПОТОКА В ОБЛАКАХ | 1992 |
|
RU2015072C1 |
| СИСТЕМА КОНТРОЛЯ ПОЛОЖЕНИЯ ГРУЗА, ПОДВЕШЕННОГО НА ГИБКОЙ СВЯЗИ К ВЕРТОЛЕТУ ПРИ МОНТАЖНЫХ РАБОТАХ | 1992 |
|
RU2015075C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МОДУЛЯ И НАПРАВЛЕНИЯ ВЕКТОРА СКОРОСТИ ПОТОКА | 1992 |
|
RU2029958C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ БУКСИРУЕМОГО ТЕЛА | 1992 |
|
RU2006429C1 |
| Устройство для измерения характеристик поля антенны | 1991 |
|
SU1810844A1 |
| Буксируемая плоская система | 1989 |
|
SU1835373A1 |
| Стенд для измерения характеристик поля антенны | 1990 |
|
SU1737374A1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУЗОМ, ПОДВЕШЕННЫМ НА ВНЕШНЕЙ ПОДВЕСКЕ К ВЕРТОЛЕТУ | 1991 |
|
RU2005665C1 |



Изобретение относится к области авиационной техники и может быть использовано на вертолетах при проведении монтажных работ. Цель изобретения - улучшение эксплуатационных характеристик системы за счет автоматического захвата произвольно расположенного груза. Система внешней подвески груза 7 к вертолету 1 содержит захваты 4, 5 с элементами соединениями 2, 3 их с вертолетом 1, опору 6, узел ориентирования груза в горизонтальной плоскости в виде силовой балки 8 и привода, выполненного в виде движителей 9, 10, узел изменения положения захватов 4, 5 относительно груза 7, включающий четыре привода, причем элементы соединения 2, 3 захватов 4, 5 выполнены из жестких складных секций. 5 ил.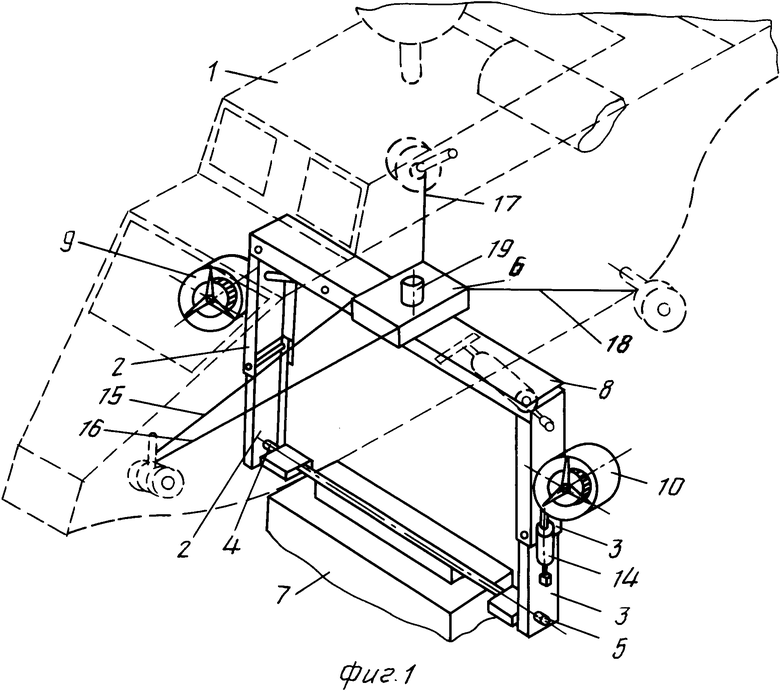
СИСТЕМА ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА К ВЕРТОЛЕТУ, содержащая закрепленные на вертолете посредством элементов соединения захваты, отличающаяся тем, что она снабжена опорой, узлом ориентирования груза в горизонтальной плоскости и узлом изменения положения захватов относительно груза, при этом узел ориентирования груза в горизонтальной плоскости включает силовую балку и привод, выполненный в виде двух движителей, узел изменения положения захватов относительно груза включает четыре привода, причем опора и силовая балка прикреплены к вертолету, силовая балка выполнена с возможностью поворота относительно опоры, элементы соединения захватов прикреплены к силовой балке с возможностью поворота относительно нее и выполнены из жестких складных секций, при этом два привода узла изменения положения захватов закреплены на силовой балке и связаны с одними секциями элементов соединения захватов, на которых расположены движители привода узла ориентирования груза в горизонтальной плоскости и два других привода узла изменения положения захватов, связанных с другими секциями элементов соединения захватов.
| Система внешней подвески груза квертолету | 1973 |
|
SU509495A1 |
| Нефтяной конвертер | 1922 |
|
SU64A1 |
