Изобретение относится к области авиационной техники, в частности к системам контроля положения подвешенного на внешней подвеске груза, например опоры линии электропередач (ЛЭП) и т.п., и может быть использовано при управлении положением груза из подвесной кабины.
Известна система контроля положения груза, подвешенного на гибкой связи к вертолету при монтажных работах, включающая установленное под фюзеляжем в носовой части вертолета устройство продольно-бокового обзора груза, выполненное в виде подвесной кабины с креслом для наблюдателя.
Недостаток данной системы - недостаточная достоверность информации о положении груза в одной из двух взаимно перпендикулярных плоскостей. При действии возмущений на груз, например порыва ветра и т.п., на режиме висения вертолета груз отклоняется под действием продольной и боковой составляющих вектора скорости ветра в продольной и боковой плоскостях. При перемещении груза в направлении носовой части фюзеляжа вертолета, т.е. в продольной плоскости, искажается действительная величина отклонения груза для наблюдателя, расположенного в подвесной кабине под вертолетом, из-за перемещения его по дуге окружности, а не прямолинейного перемещения. Кроме того, наблюдателю неудобно смотреть на груз при его расположении под ним. Известная система не позволяет осуществлять контроль за подвесным грузом с вертолетов с одной передней стойкой шасси и низко расположенным фюзеляжем, например с вертолета Ми-26, который имеет в два раза большую грузоподъемность (20 т вместо 10 т) по сравнению с вертолетом Ми-10К, из-за того, что нельзя расположить в плоскости, проходящей через продольную ось вертолета, подвесную кабину и переднюю стойку шасси на одном и том же месте, а смещение расположения подвесной кабины с наблюдателем в сторону носовой части вертолета относительно передней стойки колес шасси ограничивает из-за последней зону обзора пилота и сама величина перемещения незначительна из-за трудностей с организацией передвижения наблюдателя из фюзеляжа вертолета в подвесную кабину. Значительное смещение подвесной кабины с наблюдателем в сторону хвостовой части вертолета относительно передней стойки колес шасси неприемлемо из-за незначительного расстояния менее 0,5 м между фюзеляжем вертолета и землей в наземном положении вертолета, что не обеспечивает возможность размещения подвесной кабины с наблюдателем и удобного процесса наблюдения за подвесным грузом, а в конечном итоге сужается парк используемых вертолетов при контроле положения подвешенного на гибкой связи груза.
Цель изобретения - повышение достоверности информации о положении груза в двух взаимно перпендикулярных плоскостях.
Поставленная цель достигается тем, что система контроля положения груза, подвешенного на гибкой связи к вертолету при монтажных работах, содержащая установленное под фюзеляжем в носовой части вертолета устройство продольно-бокового обзора груза, выполненное в виде подвесной кабины с креслом наблюдателя, снабжена закрепленной на фюзеляже вертолета телекамерой продольного обзора груза, связанной с расположенным на вертолете телеэкраном. Расстояние между продольной плоскостью симметрии вертолета и креслом наблюдателя равно 0,2-0,6 максимального диаметра фюзеляжа вертолета. Расстояние от кресла наблюдателя до носа вертолета равно 0,06-0,12 длины вертолета. Расстояние между продольной плоскостью симметрии вертолета и телекамерой равно 0,5-1,3 максимального диаметра фюзеляжа вертолета. Расстояние от телекамеры до носа вертолета равно 0,16-0,4 длины вертолета.
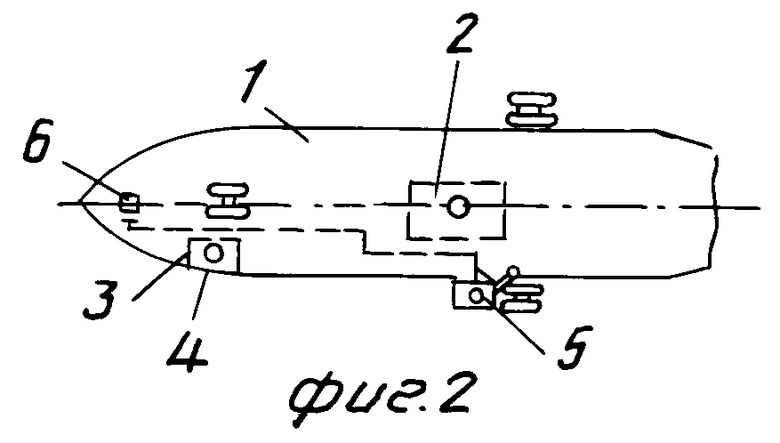
На фиг. 1 показана система контроля, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - обоснование пределов размещения кресла для наблюдателя до продольной плоскости симметрии вертолета; на фиг. 4 - то же, до носа вертолета; на фиг. 5 - обоснование пределов размещения телекамеры до носа вертолета (вид А - на фиг. 1); на фиг. 6 - то же, до продольной плоскости симметрии вертолета.
Система контроля положения груза, подвешенного на гибкой связи к вертолету при монтажных работах (фиг. 1 и 2), содержит установленное под фюзеляжем 1 в носовой части вертолета устройство продольно-бокового обзора груза 2, выполненное в виде подвесной кабины 3 с креслом 4 наблюдателя. На фюзеляже 1 вертолета закреплена телекамера 5 продольного обзора груза, связанная с расположенным на вертолете телеэкраном 6. Расстояние между продольной плоскостью симметрии вертолета и креслом 4 наблюдателя равно 0,2-0,6 максимального диаметра фюзеляжа вертолета, а расстояние от кресла 4 наблюдателя до носа вертолета - 0,06-0,12 длины вертолета. Расстояние между продольной плоскостью симметрии вертолета и телекамерой 5 равно 0,5-1,3 максимального диаметра фюзеляжа вертолета, а расстояние от телекамеры 5 до носа вертолета - 0,16-0,4 длины вертолета. Груз 2 прикреплен на гибкой связи 7 к фюзеляжу 1 вертолета вблизи его центра масс и задних стоек шасси. В носовой и хвостовой частях фюзеляжа 1 вертолета предусмотрены двери 8 и 9 для покидания экипажем вертолета. Телеэкран 6 может быть установлен как в салоне, кабине пилотов, так и в подвесной кабине 3, однако в связи с тем, что все внимание наблюдателя, расположенного в кресле подвесной кабины 3 сосредоточено на грузе 2, то предпочтительным вариантом является передача информации о продольном положении груза 2 по радиосвязи пилотом с телеэкрана 6, расположенного в основной кабине вертолета.
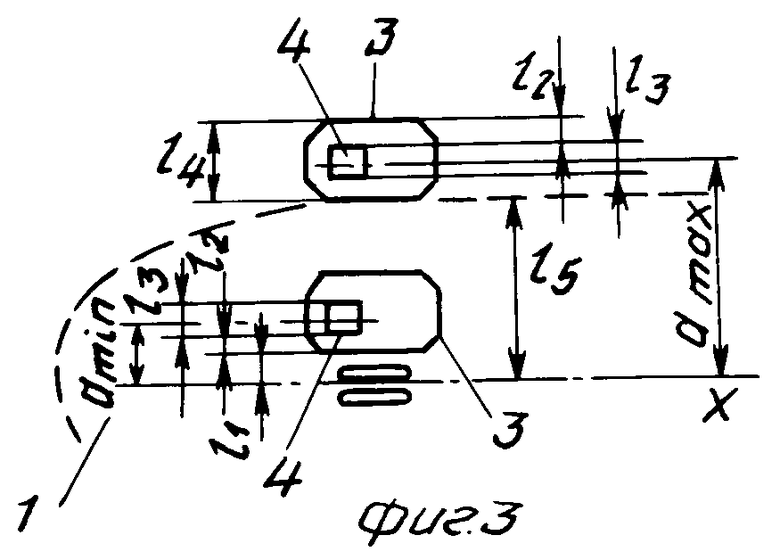
Для обоснования пределов размещения линии визирования от глаз наблюдателя до груза через расстояние между креслом для него в подвесной кабине и продольной плоскостью симметрии вертолета, проходящей через продольную ось Х, используем следующие соображения (фиг. 3). Минимальное расстояние между продольной плоскостью симметрии вертолета и подвесной кабиной должно быть с учетом максимальных размеров передней стойки шасси не менее l1=25 см, а минимальное расстояние между подвесной кабиной и креслом наблюдателя в ней не менее l2=10 см, габариты наблюдателя в плечах l3 не более 70 см. Отсюда минимальное расстояние от продольной плоскости симметрии вертолета до оси, проходящей через центр О кресла в подвесной кабине, определяется из соотношения:
amin=l1+l2+  =25+10+
=25+10+  =70 см.
=70 см.
Максимальное расстояние между продольной плоскостью симметрии вертолета и подвесной кабиной определяется исходя из величины половины диаметра фюзеляжа вертолета и равно для Ми-26 l5=1,5 м=150 см. Ширина подвесной кабины лежит в пределах l4 ≈100 см.
Таким образом, максимальное расстояние от продольной плоскости симметрии вертолета до оси, проходящей через центр О кресла для наблюдателя в подвесной кабине, определяется из соотношения:
amax=l4+l5-l2-  =100+150-10-
=100+150-10-  =205 см.
=205 см.
Пределы расположения кресла для наблюдателя до продольной плоскости симметрии вертолета определяются как отношение максимального и минимального расстояний между продольной плоскостью симметрии вертолета и креслом для наблюдателя в подвесной кабине к максимальному диаметру фюзеляжа вертолета (для Ми-26 dфюз.max=3,5 м=350 см): =
=  =0.2;
=0.2; =
= =0.6;
=0.6;
a=  ÷
÷  =0.2÷0.6.
=0.2÷0.6.
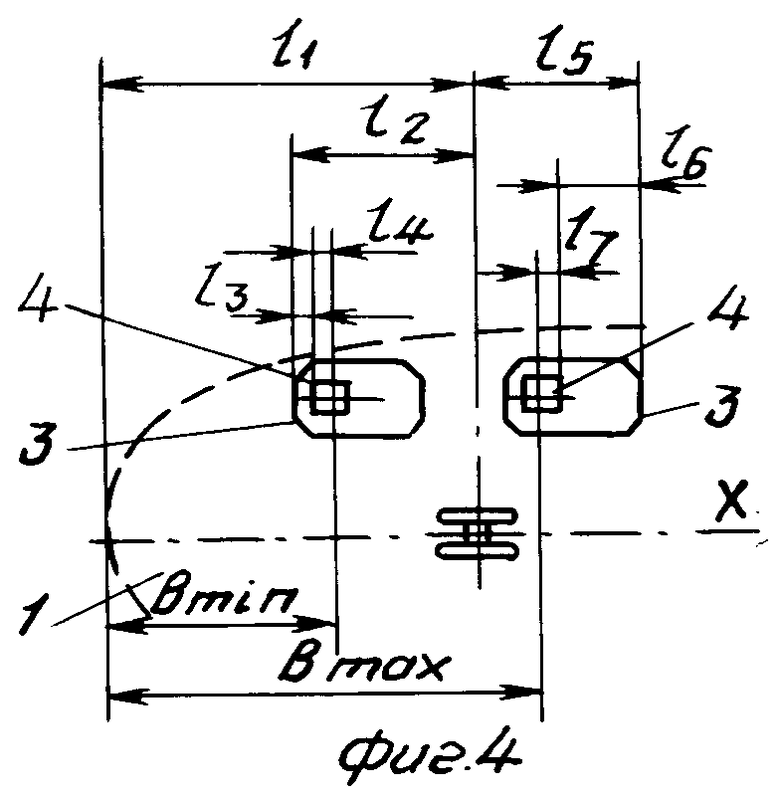
Пределы размещения линии визирования от глаз наблюдателя до груза через расстояние от носа вертолета до кресла наблюдателя в подвесной кабине ищем с учетом необходимости расположения подвесной кабины наблюдателя в районе передней стойки колес шасси и исходя из предельных отклонений в размещении подвесной кабины с креслом для наблюдателя относительно передней стойки колес шасси (фиг. 4).
Размер l5 от оси, проходящей через переднюю стойку колес шасси, до края подвесной кабины при ее смещении в сторону хвостовой части вертолета не должен превышать l5 ≅ 120 см для обеспечения безопасности при аварийном покидании экипажем вертолета через переднюю дверь 8 сбоку фюзеляжа вертолета и из-за уменьшения расстояния между нижней частью фюзеляжа вертолета и касательной к колесам шасси. Размер от оси, проходящей через переднюю стойку колес шасси, до другого края подвесной кабины при ее смещении в сторону носовой части фюзеляжа вертолета не должен превышать l2 ≅ 200 см из-за ограничения в виде размещения аппаратуры в носовой части вертолета и значительного сужения размеров диаметра фюзеляжа в носовой части ближе к носу вертолета. Кресло для наблюдателя располагается на расстоянии l3=10 см от края подвесной кабины при смещении подвесной кабины в сторону носовой части фюзеляжа. Кресло для наблюдателя располагается на расстоянии l6 ≥ 100 см от края подвесной кабины при смещении подвесной кабины в сторону хвостовой части фюзеляжа. Габариты наблюдателя в профиль не более l4=l7=30 см.
Минимальное расстояние от кресла для наблюдателя до носа вертолета с учетом расстояния от передней стойки колес шасси до носа вертолета Ми-26 l1=400 см определяется из соотношения:
Bmin= l1-l2+l3+  =400-200+10+
=400-200+10+  =225 см.
=225 см.
Максимальное расстояние от кресла для наблюдателя до носа вертолета определяется из соотношения:
Bmax= l1+l5-l6-l7=400+120-100-  =405 см.
=405 см.
Пределы размещения кресла для наблюдателя до носа вертолета по отношению к длине вертолета (lверт.=33,7 м=3370 см): =
=  =0.06;
=0.06; =
=  =0.12;
=0.12;
b=  ÷
÷  = 0.06÷0.12.
= 0.06÷0.12.
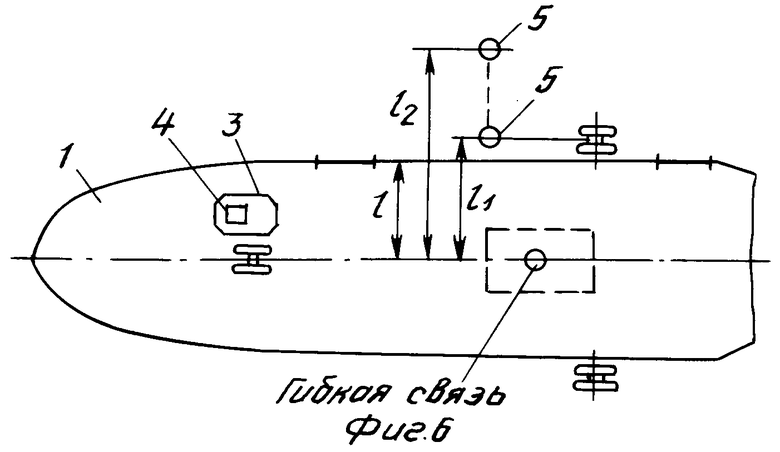
Пределы размещения телекамеры до продольной плоскости симметрии вертолета определяются следующим образом (фиг. 6). Минимальное расстояние от оптической оси телекамеры до плоскости симметрии вертолета определяется исходя из размеров фюзеляжа, т.е. величины половины диаметра фюзеляжа вертолета l=1,5 м=150 см и величины половины диаметра телекамеры dm = 36 см и  =
=  = 18 см и плюс величина зазора между телекамерой и фюзеляжем, равно l3=10 см:
= 18 см и плюс величина зазора между телекамерой и фюзеляжем, равно l3=10 см:
l1=l+l3+  =150+10+18=178 см.
=150+10+18=178 см.
Максимальное расстояние от продольной плоскости симметрии вертолета до телекамеры определяется исходя из решения вопросов прочности и равно l2=4,5 м=450 см.
Пределы расположения телекамеры от продольной плоскости симметрии вертолета к максимальному диаметру вертолета:
Сmin=  =
=  = 0.5;
= 0.5;
 =
= 1.3;
1.3;
C=  ÷
÷  = 0.5÷1.3.
= 0.5÷1.3.
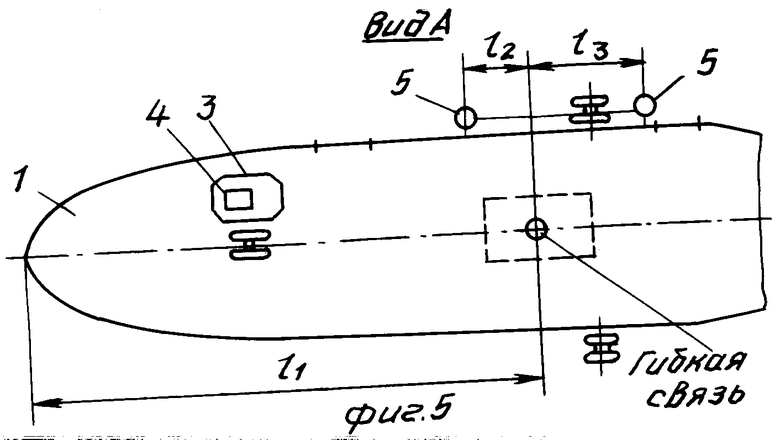
Пределы размещения телекамеры до носа вертолета определяются следующим образом (см. фиг. 5).
Расстояние от места крепления гибкой связи до носа вертолета для Ми-26 равно l1=12 м=1200 см.
Телекамера может быть расположена в пределах между передней и задней боковых дверей вертолета. Расстояние до передней двери от места крепления равно для Ми-26 l2=680 см, а до задней 9 двери l3=180 см.
Минимальное и максимальное расстояния от телекамеры до носа вертолета:
Кmin=l1-l2=1200-680=520 см;
Кmax=l1+l3=1200+180=1380 см.
Отсюда  =
=  =0.16,
=0.16,  =
=  =0.4 и пределы размещения телекамеры до носа вертолета
=0.4 и пределы размещения телекамеры до носа вертолета
K=  ÷
÷  =0.16÷0.4.
=0.16÷0.4.
Устройство работает следующим образом.
При установке груза 2, например опоры ЛЭП, наблюдатель, расположенный в кресле 4 подвесной кабины 3, одновременно управляющий с помощью системы ручного управления подвешенным на гибкой связи 7 грузом 2, определяет отклонения от вертикали и заданной точки пространства в продольной и боковой плоскостях. Одновременно положение груза 2 в продольной плоскости индуцируется с помощью телекамеры 5 на телеэкране 6 в кабине пилотов. Второй пилот или оператор в салоне вертолета по радиосвязи передает информацию об отклонении груза в продольной плоскости наблюдателю, который, таким образом, имеет полную информацию о действительном положении груза.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ГРУЗОМ, ПОДВЕШЕННЫМ НА ВНЕШНЕЙ ПОДВЕСКЕ К ВЕРТОЛЕТУ | 1991 |
|
RU2005665C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ БУКСИРУЕМОГО ТЕЛА | 1992 |
|
RU2006429C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПОТОКА В ОБЛАКАХ | 1992 |
|
RU2015072C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МОДУЛЯ И НАПРАВЛЕНИЯ ВЕКТОРА СКОРОСТИ ПОТОКА | 1992 |
|
RU2029958C1 |
| СИСТЕМА ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА К ВЕРТОЛЕТУ | 1992 |
|
RU2015074C1 |
| СИСТЕМА ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА К ВЕРТОЛЕТУ | 1992 |
|
RU2030332C1 |
| Буксируемая мишень для имитации летательных аппаратов | 1990 |
|
SU1837036A1 |
| УСТРОЙСТВО ДЛЯ ВЫПУСКА-УБОРКИ БУКСИРУЕМОГО ОБЪЕКТА | 1995 |
|
RU2094321C1 |
| ЛЕДЯНОЕ ХРАНИЛИЩЕ И СПОСОБ ЕГО СОЗДАНИЯ | 1993 |
|
RU2092752C1 |
| ПОДВЕСНОЕ УСТРОЙСТВО | 1995 |
|
RU2094322C1 |
Использование: при управлении положением груза из подвесной кабины. Цель изобретения - повышение достоверности информации о положении груза в двух взаимно перпендикулярных плоскостях. Система контроля положения груза, подвешенного на гибкой связи к вертолету при монтажных работах, содержит устройство продольно-бокового обзора в виде подвесной кабины 3 с креслом 4 для наблюдателя и телекамеру 5 продольного обзора, расположенные под фюзеляжем 1 вертолета в заданных пределах, а также груз 2, телеэкран 6, гибкую связь 7 и двери 8 и 9. 6 ил.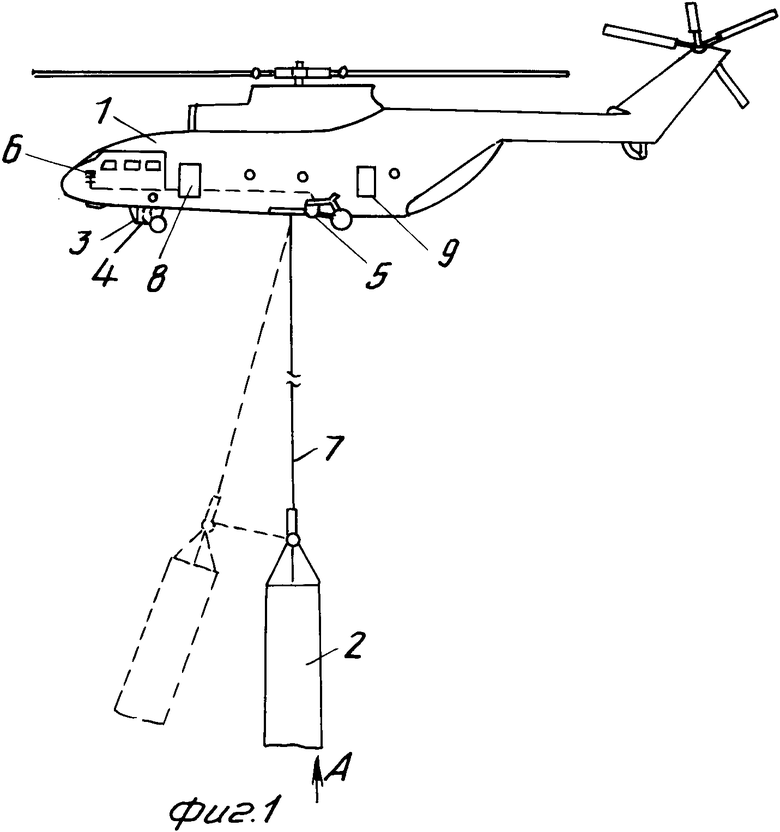
СИСТЕМА КОНТРОЛЯ ПОЛОЖЕНИЯ ГРУЗА, ПОДВЕШЕННОГО НА ГИБКОЙ СВЯЗИ К ВЕРТОЛЕТУ ПРИ МОНТАЖНЫХ РАБОТАХ, содержащая установленное под фюзеляжем в носовой части вертолета устройство продольно-бокового обзора груза, выполненное в виде подвесной кабины с креслом наблюдателя, отличающаяся тем, что она снабжена закрепленной на фюзеляже вертолета телекамерой продольного обзора груза, связанной с расположенным на вертолете телеэкраном, при этом расстояние между продольной плоскостью симметрии вертолета и креслом наблюдателя равно 0,2 - 0,6 максимального диаметра фюзеляжа вертолета, а расстояние от кресла наблюдателя до носа вертолета равно 0,06 - 0,12 длины вертолета, причем расстояние между продольной плоскостью симметрии вертолета и телекамерой равно 0,5 - 1,3 максимального диаметра фюзеляжа вертолета, а расстояние от телекамеры до носа вертолета равно 0,16 - 0,4 длины вертолета.
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Инструкция по технической эксплуатации | |||
| М., 1974, с.284, рис.60. | |||
