Изобретение относится к авиационной технике, в частности к конструкции устройств, буксируемых на гибкой связи, и может быть использовано для ориентации буксируемых тел в пространстве с целью, например, изменения положения измерительной оси аппаратуры, размещенной в буксируемом теле, и т. п.
Наиболее близким по технической сущности к предлагаемому является устройство для ориентации буксируемого тела, содержащее расположенный на буксируемом теле привод, связанный с одной стороны с механизмом изменения углового положения буксируемого тела, выполненным в виде расфиксатора участка буксировочного каната вблизи буксируемого тела, а с другой стороны - с блоком управления приводом, и соединенный с буксировщиком и буксируемым телом буксировочный канат (см. патент ФРГ N 1456132, НКИ 62 С, 30/20, 1972 ).
Недостатками данного устройства являются низкая безопасность из-за невозможности обеспечения угловой ориентации буксируемого тела в продольной плоскости в широком диапазоне скоростей буксировки ввиду наличия неустойчивого движения буксируемого тела, связанного с перемещением точки крепления буксировочного каната к буксируемому телу относительно его центра масс, дискретное изменение углового положения буксируемого тела по углу тангажа с одного значения на другое на фиксированной скорости буксировки, соответствующее двум точкам возможного расположения гибкой связи на буксируемом теле (крепление за нос и над центром масс буксируемого тела) в одном полете и недостаточное удобство пользования, обусловленное невозможностью многократного изменения углового положения буксируемого тела в одном полете.
Целью изобретения является повышение безопасности при ориентации буксируемого тела за счет повышения его устойчивости, расширение эксплуатационных характеристик за счет расширения диапазона углового отклонения буксируемого тела и повышение удобства пользования за счет возможности многократного изменения углового положения буксируемого тела в одном полете.
Цель достигается тем, что устройство для ориентации буксируемого тела, содержащее расположенный на буксируемом теле привод, связанный с одной стороны с механизмом изменения углового положения, а с другой стороны - с блоком управления приводом, и соединенный с буксируемым телом буксировочный канат, согласно изобретению, снабжено подвесной системой, при этом механизм изменения углового положения буксируемого тела выполнен в виде размещенной сверху него платформы с роликами, расположенными симметрично относительно платформы и продольной плоскости буксируемого тела в направляющих, которые размещены в буксируемом теле параллельно его продольной оси, причем привод соединен с платформой, а подвесная система связана с одной стороны с буксировочным канатом, а с другой стороны - с платформой.
Кроме того, тем, что подвесная система состоит из вертлюга и четырех строп, попарно размещенных в продольной и поперечной плоскостях буксируемого тела, причем буксировочный канат связан с платформой через вертлюг и стропы.
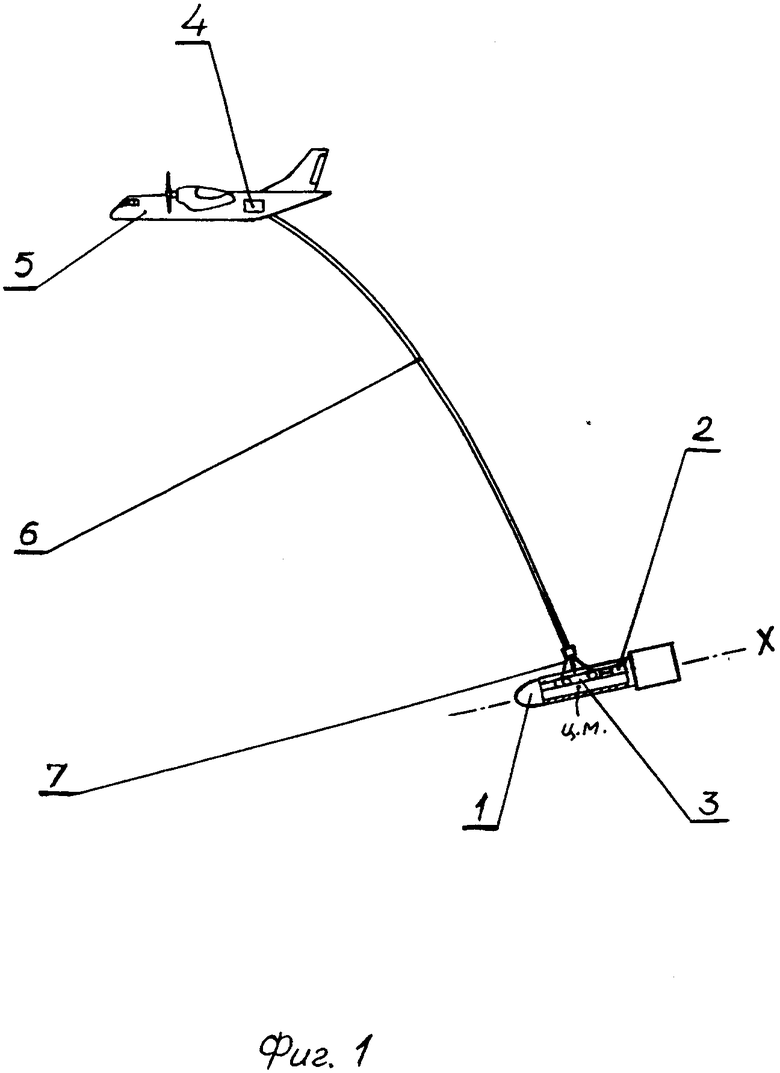
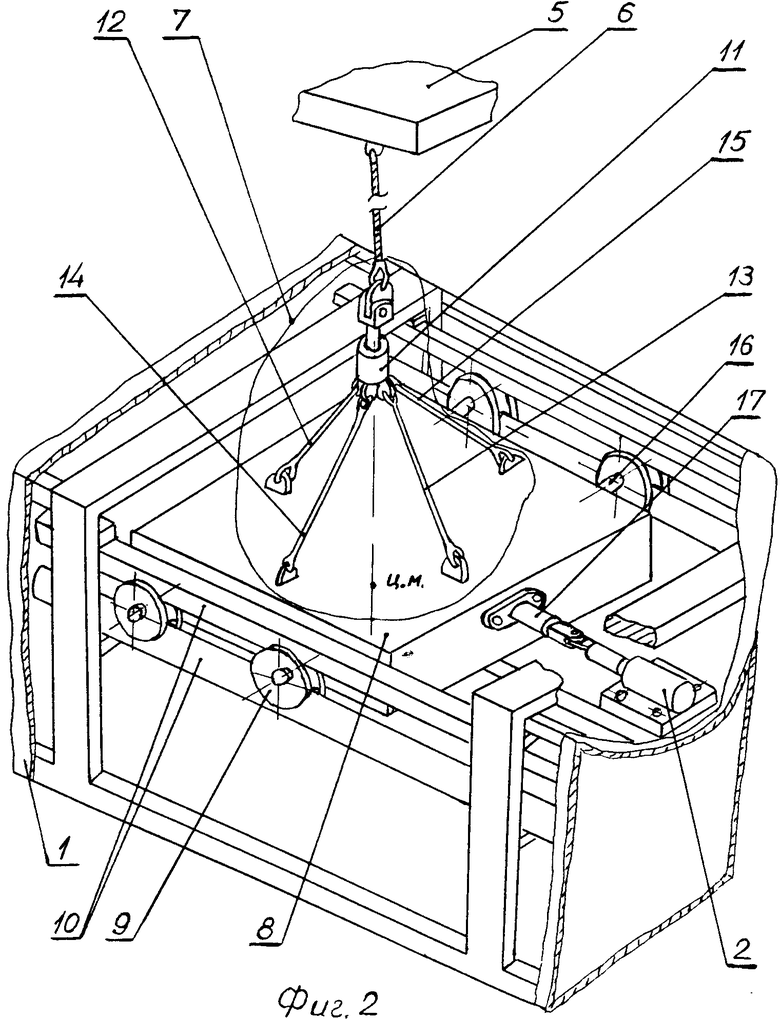
На фиг. 1 показано предлагаемое устройство общий вид; на фиг. 2 - размещение конструктивных элементов устройства на буксируемом теле.
Устройство для ориентации буксируемого тела (см. фиг. 1, 2) содержит расположенный на буксируемом теле 1 привод 2, связанный с одной стороны с механизмом 3 изменения углового положения буксируемого тела, а с другой стороны - с блоком 4 управления приводом, размещенным, например, на буксировщике 5, и соединенный с буксировщиком 5 и буксируемым телом 1 буксировочный канат 6.
Устройство также снабжено подвесной системой 7.
При этом механизм 3 изменения углового положения буксируемого тела 1 выполнен в виде размещенной сверху него платформы 8 с роликами 9, расположенными симметрично относительно платформы 8 и продольной плоскости буксируемого тела 1 в направляющих 10, которые размещены в буксируемом теле 1 параллельно его продольной оси Х, причем привод 2 соединен с платформой 8, а подвесная система 7 связана с одной стороны с буксировочным канатом 6, а с другой стороны - с платформой 8.
Подвесная система 7 состоит из вертлюга 11, к нижней части которого прикреплены четыре стропы 12-15, попарно размещенные в продольной 12, 13 и поперечной 14, 15 плоскостях, причем буксировочный канат 6 связан с платформой 8 через вертлюг 11 и стропы 12-15.
На торцах платформы 8 закреплены оси 16, на каждой из которых насажены ролики 9 с ребордами.
Платформа 8 связана с приводом 2 посредством штока 17.
Блок 4 управления приводом может быть выполнен в виде тумблера, подающего напряжение от источника питания посредством, например, кабель-троса 6 на привод 2.
Привод 2 может быть выполнен электрическим, гидравлическим, пневматическим и т. д.
Расположение нижней части вертлюга 11 подвесной системы 7, где соединены ветви строп подвесной системы, относительно центра масс буксируемого тела и диапазон изменения углов между ветвями строп подвесной системы в продольной и боковой плоскостях определяются конструктивными соображениями, а именно массовыми, геометрическими и аэродинамическими характеристиками буксируемого тела, требованиями к его устойчивости.
Улучшение характеристик устойчивости буксируемого тела при изменении его углового положения при наличии подвесной системы определяется из следующих соотношений.
Коэффициент момента тангажа буксируемого тела с учетом подвесной системы может быть определен из уравнения моментов для буксируемого тела по формуле +
+ 

При подвеске каната через подвесную систему в точке подвеса (Хт, Yт) относительно центра масс буксируемого тела его устойчивость определяется величиной mZΣα .
Для упрощения анализа принимаем
sin α = α , cos α = 1.
Тогда из (1) получим путем дифференцирования по углу α
m
 - C
- C (YT/ba) - CX·(XT/ba). (2)
(YT/ba) - CX·(XT/ba). (2)
Из уравнения (2) следует, что подвесная система улучшает устойчивость буксируемого тела за счет наличия членов уравнения
-
 - C
- C YT/ba-CX·XT/ba.
YT/ba-CX·XT/ba.
Вертлюг снимает момент кручения от несущего каната и не передает его на буксируемое тело.
В боковой плоскости коэффициент момент рысканья записывается следующим уравнением:
myΣ= my= mY∂+m
В боковой плоскости буксируемое тело устойчиво при наличии собственной устойчивости, т. е. при myβ < 0.
По крену устойчивость буксируемой системы обеспечивается подвесной системой.
При отклонении буксируемой системы от равновесного состояния по углу крена от веса буксируемого тела создается момент, возвращающий буксируемую систему в исходное положение.
Рассмотрим управление угловым положением буксируемого тела за счет смещения подвесной системы относительно центра масс буксируемого тела, т. е. за счет изменения величины Хт.
В равновесном состоянии у буксируемого тела
mzΣ = 0,
т. е.  C
C c
c b
b C
C inα·(YT/
inα·(YT/ ] +
] +
С учетом принятых допущений
sin α = α , cos α = 1 получим балансировочное значение угла атаки буксируемого тела m
m
 /
/ C
C /
/ = -mZO-m
= -mZO-m
откуда
 )
) 
Как видно из (4), смещая подвесную систему, можно изменять балансировочное значение угла атаки α буксируемого тела при улучшении его характеристик устойчивости, что повышает безопасность при управлении угловым положением буксируемого тела, расширении диапазона углов отклонения буксируемого тела в пределах ± 45о.
Устройство работает следующим образом.
При буксировке тела 1 и необходимости изменения его углового положения на привод 2 подают напряжение с блока 4 управления. Привод 2 перемещает платформу 8 вместе с подвесной системой 7 в направляющих. При этом положение точки крепления буксировочного каната 6 относительно центра масс буксируемого тела 1 сдвигается в сторону носовой части или хвостовой части буксируемого тела 1 в зависимости от знака управляющего напряжения на обмотках привода 2. Одновременно с перемещением точки крепления буксировочного каната 6 относительно центра масс буксируемого тела 1 возникает продольный момент по углу тангажа, действующий на буксируемое тело 1 от его силы веса. Под действием продольного момента буксируемое тело 1 изменяет свое угловое положение до момента отключения управляющего напряжения с привода 2, шток 17 фиксируется в заданном положении. Буксируемое тело 2 занимает новое балансировочное положение по углу тангажа.
Предложенное устройство для ориентации буксируемого тела позволяет повысить безопасность за счет повышения устойчивости буксируемого тела при изменении его углового положения, расширить эксплуатационные характеристики и повысить удобство пользования за счет увеличения диапазона изменения положения точки подвеса каната к буксируемому телу относительно центра масс в продольной плоскости в одном полете.
Кроме того, создано эффективное средство управления буксируемыми телами для получения продольного момента вокруг центра масс в направлении пикирования и кабрирования в широком диапазоне скоростей буксировки.
К преимуществам предлагаемого устройства относится также возможность изменения по величине момента вокруг центра масс буксируемого тела вне зависимости от скорости буксировки. (56) Патент ФРГ N 1456132, кл. 62 С 30/20, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для буксировки измерителя магнитного поля | 1990 |
|
SU1770930A1 |
| Буксируемая плоская система | 1989 |
|
SU1835372A1 |
| Буксируемая плоская система | 1989 |
|
SU1835373A1 |
| УСТРОЙСТВО ДЛЯ ВЫПУСКА-УБОРКИ БУКСИРУЕМОГО ОБЪЕКТА | 1995 |
|
RU2094321C1 |
| Буксируемая система | 1991 |
|
SU1810235A1 |
| Устройство для буксировки и выпуска - уборки буксируемого тела | 1991 |
|
SU1749124A1 |
| ПОДВЕСНОЕ УСТРОЙСТВО | 1995 |
|
RU2094322C1 |
| Буксируемая система | 1988 |
|
SU1724513A1 |
| Буксируемая мишень для имитации летательных аппаратов | 1990 |
|
SU1837036A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПОТОКА В ОБЛАКАХ | 1992 |
|
RU2015072C1 |
Изобретение относится к авиационной технике, в частности к конструкции устройств, буксируемых на гибкой связи, и может быть использовано для ориентации буксируемых тел в пространстве с целью, например, изменения положения измерительной оси аппаратуры, размещенной в буксируемом теле, и т. п. Цель изобретения - повышение безопасности при ориентации буксируемого тела за счет повышения его устойчивости, расширение эксплуатационных характеристик за счет расширения диапазона углового отклонения буксируемого тела и повышение удобства пользования за счет возможности многократного изменения углового положения буксируемого тела в одном полете. Устройство для ориентации буксируемого тела содержит привод, механизм изменения углового положения, состоящий из платформы с роликами, направляющими, блок управления на буксировщике, буксировочный канат и подвесную систему, состоящую из вертлюга, четырех строп, а также ось и шток. 1 з. п. ф-лы, 2 ил.
