Л 32HZ827
| название | год | авторы | номер документа |
|---|---|---|---|
| Буксируемая мишень для имитации летательных аппаратов | 1990 |
|
SU1791280A1 |
| ПРИВЯЗНОЙ ВОЗДУШНЫЙ ИМИТАТОР ВЕРТОЛЁТА | 2016 |
|
RU2622583C1 |
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ | 2014 |
|
RU2563921C1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ ДЛЯ УПРАВЛЕНИЯ ПОЛЕТОМ ПРИ РЫСКАНИИ И ДЛЯ УПРАВЛЕНИЯ ТЯГОЙ ГИБРИДНОГО ВЕРТОЛЕТА | 2016 |
|
RU2649842C1 |
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2013 |
|
RU2648502C2 |
| СПОСОБ ОПТИМИЗАЦИИ ШУМА, ПРОИЗВОДИМОГО ВСПОМОГАТЕЛЬНЫМ ВИНТОМ, И ХАРАКТЕРИСТИК ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА, И ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2014 |
|
RU2601966C2 |
| ВИНТОКРЫЛ | 2012 |
|
RU2500578C1 |
| ЗАКЛЮЧЕННЫЙ В ОБТЕКАТЕЛЬ ВИНТ ЛЕТАТЕЛЬНОГО АППАРАТА И ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2014 |
|
RU2570971C2 |
| СКОРОСТНОЙ ГИБРИДНЫЙ ВЕРТОЛЕТ С БОЛЬШИМ РАДИУСОМ ДЕЙСТВИЯ | 2008 |
|
RU2473454C2 |
| ВЫСОКОСКОРОСТНОЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С БОЛЬШОЙ ДАЛЬНОСТЬЮ ПОЛЕТА | 2012 |
|
RU2520843C2 |
&Ј/г.2
Изобретение относится к области авиационной техники, в частности к конструкции устройств для имитации буксируемых летательных аппаратов, и может быть использовано для определения параметров и характеристик наземных и бортовых оптических и радиолокационных средств.
Целью изобретения является расширение диапазона видов имитируемых летательных аппаратов за счет обеспечения имитации винтокрылых летательных аппаратов.
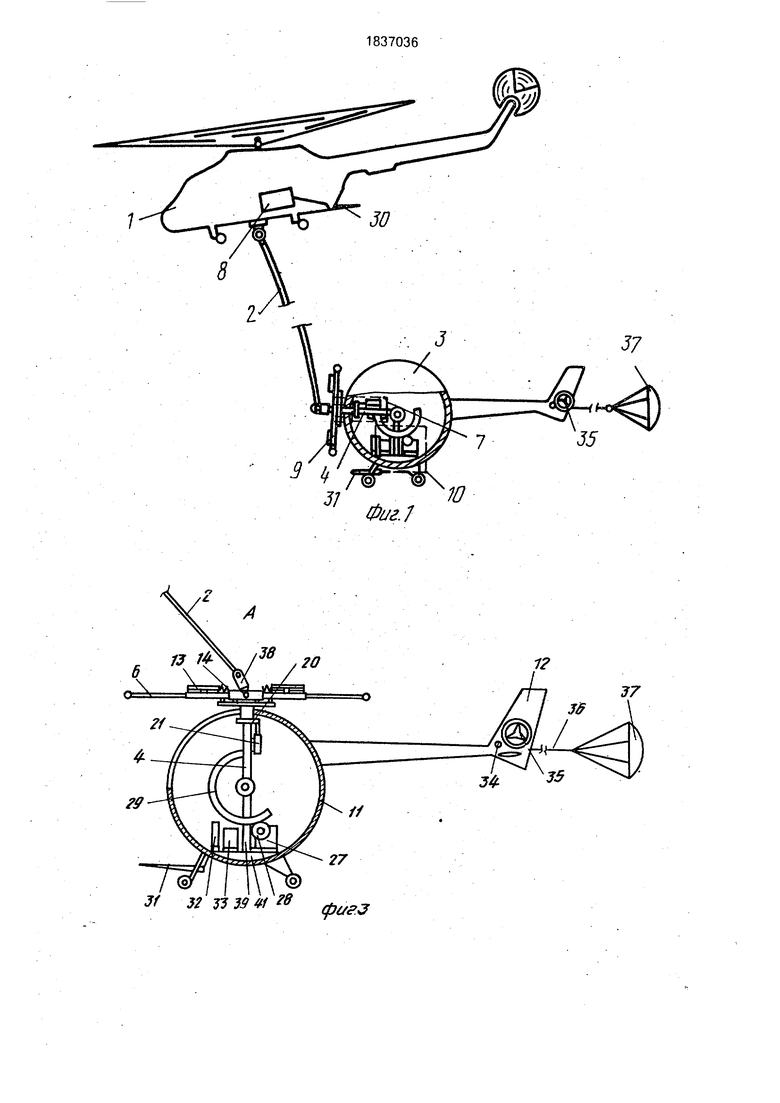
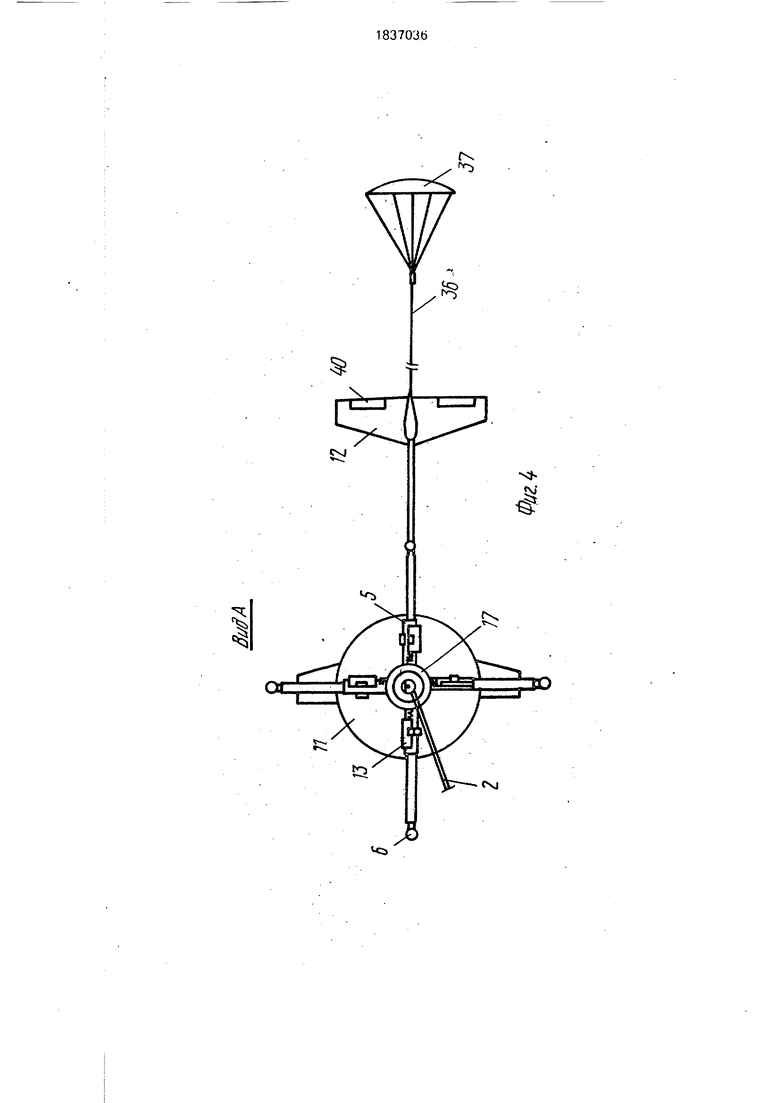
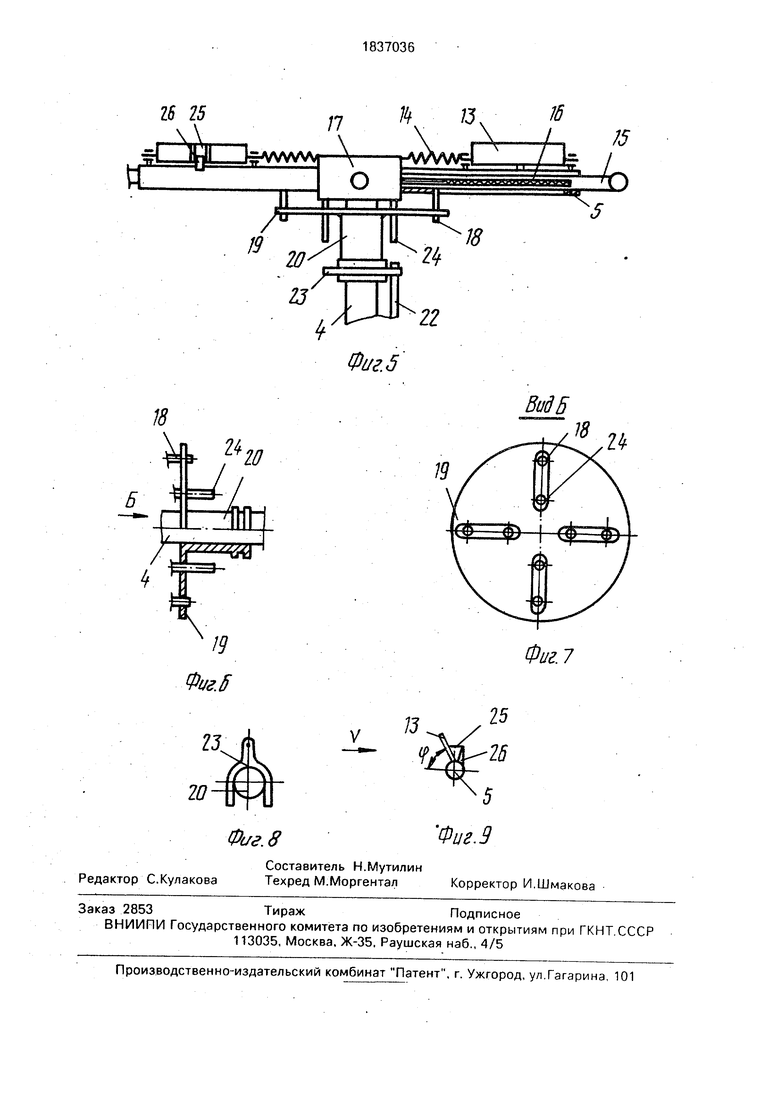
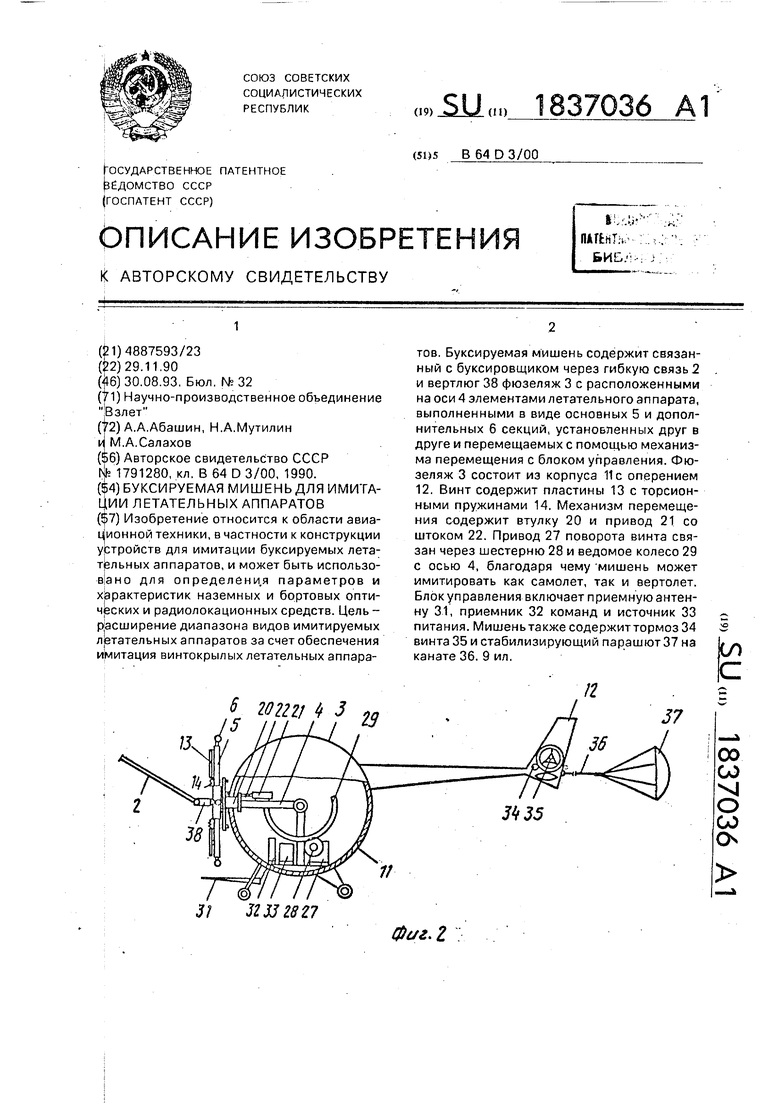
На фиг. 1 показан общий вид устройства; на фиг. 2 - конструкция буксируемой мишени при имитации самолета с винтовым двигателем; на фиг. 3- конструкция буксируемой мишени при имитации вертолета; на фиг. 4 - вид по стрелке А на фиг. 3; на фиг. 5 - конструкция винта; на фиг. 6 - конструкция крепления подвижной втулки на оси; на фиг. 7 - вид по стрелке Б на фиг.6; на фиг. 8 - установка вилки в канавке подвижной втулки; на фиг. 9 - установка пластины на стержне.
Буксируемая мишень для имитации летательных аппаратов содержит связанный с буксировщиком 1, например вертолетом, самолетом, через гибкую связь 2 фюзеляж 3 с элементами конструкции летательного аппарата, расположенными на оси 4 и выпол- ненными в виде основных 5 и дополнительных 6 секций, установленных друг в друге с возможностью их линейного относительного перемещения, и установленный в фюзеляже 3 механизм 7 линейного перемещения секций с блоком управления 8.
Буксируемая мишень выполнена в виде вертолета, лопасти винта 9 которого выполнены из основных 5 и дополнительных б секций, и снабжена установленным внутри фюзеляжа 3 и кинематически связанным через ось 4 с основными секциями 5 лопастей механизмом 10 одновременного изменения их пространственного положения в продольной плоскости мишени, связанным с блоком управления 8.
Фюзеляж 3 состоит из корпуса 11, снабженного оперением 12 самолетной схемы.
Винт 9 содержит пластины 13, закрепленные на основных секциях 6 с возможностью поворота на торсионных-пружинах 14.
Каждая из дополнительных секций б лопастей винта 9 состоит из полого стержня 15, прикрепленного на пружине 16 к ротору 17, и штифта 18, жестко прикрепленного к стержню 15, причем штифт 18 может перемещаться в пазу стержней 6 при освобождении его после перемещения основания 19 с втулкой 20 вдоль оси 4 механизма 7 линейного перемещения секций, состоящего из
привода 21, его штока 22 и вилки 23. Вилка 23 установлена в пазу втулки 20.
Для фиксации основания 19 в заданном положении при выходе штифтов 18 на рото- ре 17 установлены дополнительные штифты 24.
Для фиксации угла р отклонения пластин 13 при действии набегающего потока воздуха на них установлен упор 25, контак- тирующий с выступом 26 на стержне 15.
Механизм 10 одновременного изменения пространственного положения основных 5 и дополнительных 6 секций в продольной плоскости мишени состоит из привода 27, например электродвигателя, кинематически через ведущую шестерню 28 и ведомое колесо 29 связанного с осью 4.
В корпусе 11 фюзеляжа 3 буксируемой мишени выполнена прорезь для свободного поворота оси 4 из горизонтального положения в вертикальное.
Блок управления 8 механизмами 7 и 10 выполнен в виде источнику питания, например постоянного тока, связанного с пере
датчиком команд, выход которого связан с
передающей антенной 30.
На корпусе 11 фюзеляжа 3 буксируемой
мишени установлена приемная антенна 31,
связанная с приемником команд 32. Прием0 ник команд 32 запитывается от источника
питания 33, установленного в фюзеляже 3.
Выход приемника команд 32 связан как
приводом 27, так и приводом 21 и тормозом
34, обеспечивающим освобождение или
5 стопорение хвостового винта 35, имитируя
вертолет с хвостовым винтом либо без него.
Для улучшения стабилизации буксируемой мишени по углам курса и тангажа к ней может быть прикреплен на канате 36 стаби- 0 лизирующий парашют 37.
Между гибкой связью 2 и осью 4 для снятия закручивающего момента от гибкой связи 2 установлен вертлюг 38,
Ось 4 может быть закреплена в фюзеля- 5 же 3 буксируемой мишени с помощью стойки 39.
На хвостовом оперении 12 установлены горизонтальные и вертикальные рули 40, обеспечивающие требуемую центровку фю- 0 зеляжа 3 буксируемой мишени.
Для стабилизации буксируемой мишени по крену на ней может быть установлен груз 41, расположенный ниже центра масс буксируемой мишени.
5 Устройство работает следующим образом.
В начальный момент времени буксируемая мишень перемещается в пространстве на гибкой связи 2 с помощью вертолета 1 и имитирует одномоторный самолет с винто ым двигателем. Винт 9 вращается вокруг |зси 4 благодаря действию набегающего потока воздуха на пластины 13. Пластины 13 отклоняются, растягивая пружины 14 до Контактирования упоров 25 с выступами 26, Йто обеспечивает пластинам 13 заданное сложение по углу р. Для имитации верто- |пета в этом же полете с блока управления 8 буксировщика 1 через передающую антенну Ьб, приемную антенну 31, приемник команд 02 подают сигнал на привод 27 механизма 10 одновременного изменения пространственного положения основных и дополнительных секций. Привод 27 через зубчатую иестерню 28, зубчатое колесо 29 перемеща- |ет ось 4 из горизонтального положения в вертикальное, вместе с которой перемеща- Јтся винт 9, насаженный на ось 4. После занятия осью 4 и винтом 9 положения, показанного на фиг.З, привод 27 механизма 10 Ьдновременного изменения пространст- Цнного положения основных и дополни- ельных секций винта 9 отключается. С Целью сохранения соотношения длины ло- астей винта 9 и корпуса 11 буксируемой |иишени от блока управления 8 буксировщи- |са 1 подают сигнал по радиоканалу на природ 21 механизма 7 линейного Перемещения секций, Шток 22 привода 21 тягивается и перемещает посредством илки 23 втулку 20 с основанием 19 вдоль Ьси 4. Штыри 18 выходят из прорезей осно- рания 19, освобождая стержень 15 дополнительных секций 6. Под действием пружин 1 б Јтержни 15 выдвигаются из основных сек- |дий 5 на величину, зависящую от скорости вращения винта 9 и жесткости пружины 16.
Винт 9 вращается вокруг оси 4 с помощью пластин 13. Для имитации вертолета с вращающимся хвостовым винтом от блока управления 8 буксировщика 1 подается сигнал на тормоз 34, который освобождает ось хвостового винта 35. Под действием набегающего потока воздуха хвостовой винт 35 начинает вращаться вокруг своей оси„
Таким образом, в пространстве в одном полете перемещается также и имитатор вер- толета с работающим винтом. После окончания работ буксируемая мишень может быть опущена на землю.
Ф о рмула изобретения Буксируемая мишень для имитации летательных аппаратов, содержащая связанный с буксировщиком через гибкую связь фюзеляж с элементами конструкции летательного аппарата, выполненным в виде ос- новных и дополнительных секций, установленных друг в друге с возможностью их линейного относительного перемещения, и поставленный в фюзеляже механизм линейного перемещений секций с блоком управления, отличающаяся тем, что, с целью расширения диапазона видов имитируемых летательных аппаратов за счет обеспечения имитации винтокрылых летательных аппаратов, она выполнена в виде вертолета, лопасти винта которого выполнены из основных и дополнительных секций, и снабжена установленным внутри фюзеляжа и связанным с основными секциями лопастей механизмом одновременного изменения их пространственного положения в продольной плоскости мишени с блоком управления.
Jf X 75 39 41 &
СригЗ
37
Фиг. /
1
37
rs
9ГШС81
18
Б +
%
/Я 14 I
f
19 Фиг. 5
/. 8
Фиг.5
Вид5
24
Фиг. 7
