Изобретение относится к авиационной технике и может быть использовано на вертолетах при проведении монтажных работ по установке грузов.
Известна система внешней подвески груза к вертолету, содержащая ферму - подвеску, грузовой трос, грузовые стропы с захватами в виде крюков, силовой замок и замок-рвушку [1], недостатками которой являются низкие эксплуатационные характеристики и недостаточное удобство пользования из-за невозможности ориентирования груза с вертолета в широком диапазоне углов в горизонтальной плоскости.
Известна система внешней подвески груза к вертолету, содержащая закрепленные на вертолете грузовые стропы с захватами, силовой замок, запирающий грузовой трос [2], недостатками которой являются низкие эксплуатационные характеристики и недостаточное удобство пользования из-за невозможности ориентирования груза с вертолета в широком диапазоне углов в горизонтальной плоскости.
Наиболее близкой по технической сущности к предлагаемой является система внешней подвески груза к вертолету [3], содержащая грузовые стропы с захватами, опору, силовую балку и узел ориентирования груза в горизонтальной плоскости, при этом опора и силовая балка прикреплены к вертолету, а грузовые стропы закреплены на силовой балке.
Однако данная система имеет низкие эксплуатационные характеристики и недостаточное удобство пользования, обусловленные невозможностью ориентирования груза в широком диапазоне углов в горизонтальной плоскости с вертолета. Необходимость ориентирования груза в горизон- тальной плоскости при монтажных работах объясняется тем, что вертолет зависает над местом установки груза по направлению вектора скорости ветра из-за наиболее благоприятных характеристик устойчивости, при этом груз может быть ориентирован над местом установки с отклонением от требуемого положения в широком диапазоне углов. Грузы массой свыше 2 т трудно доворачивать в требуемое положение с помощью такелажников. Поэтому доворот груза осуществляется с помощью вертолета, но в ограниченном диапазоне углов, так как увеличение диапазона углов доворота груза более ±45о не обеспечивает требуемых характеристик устойчивости вертолета с грузом на внешней подвеске. Кроме того, при отклонениях груза от требуемого положения точный доворот груза с заданной точностью с помощью вертолета проблематичен.
Задачей изобретения является создание системы внешней подвески груза к вертолету, позволяющей улучшить эксплуатационные характеристики и повысить удобства пользования путем ориентирования груза в широком диапазоне углов в горизонтальной плоскости.
Технический результат достигается тем, что в системе внешней подвески груза к вертолету, содержащей закрепленные на вертолете грузовые стропы с захватами, опору, силовую балку и узел ориентирования груза в горизонтальной плоскости, при этом опора и силовая балка прикреплены к вертолету, а грузовые стропы закреплены на силовой балке. Силовая балка выполнена с возможностью поворота относительно опоры в горизонтальной плоскости - в виде привода, размещенного на опоре и кинематически связанного с силовой балкой. Кроме того, привод выполнен в виде двух лебедок, размещенных на опоре в диаметрально противоположных точках и связанных посредством двух гибких связей с двумя секциями барабана, закрепленного на оси силовой балки.
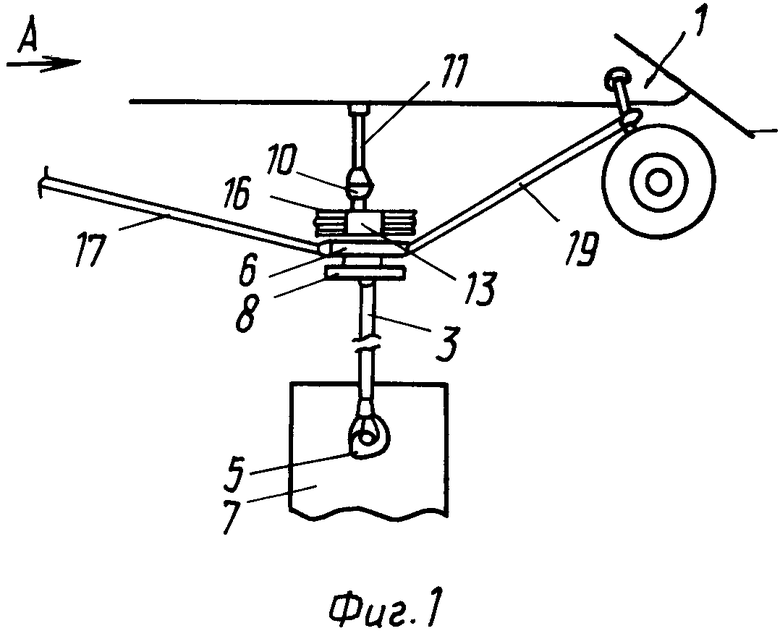
На фиг. 1 показана система, общий вид; на фиг. 2 - вид по стрелке А на фиг. 1; на фиг. 3 - конструкция крепления опоры и силовой балки на оси.
Система внешней подвески груза к вертолету содержит закрепленные на вертолете 1 грузовые стропы 2, 3 с захватами 4, 5 в виде крюков с защелкой. Система также снабжена опорой 6 и узлом ориентирования груза 7 в горизонтальной плоскости. При этом узел ориентирования груза с в горизонтальной плоскости включает силовую балку 8 и привод, причем опора 6 и силовая балка 8 расположены на оси 9 вертлюга 10, который прикреплен к вертолету 1 с помощью каната 11. Возможно также жесткое крепление вертлюга 10 к вертолету, например, с помощью вала. Силовая балка 8 выполнена с возможностью поворота относительно опоры 6. Привод выполнен в виде двух лебедок 12, 13, размещенных на опоре 6 в диаметрально противоположных точках и кинематически связанных посредством двух гибких связей 14, 15 с двумя секциями барабана 16, жестко закрепленного на оси 9 силовой балки 8. Грузовые стропы 2 и 3 закреплены на силовой балке 8. Для фиксации опоры 6 в заданном положении предусмотрены гибкие растяжки 17, 18 и 19. Между барабаном 16 и опорой 6, а также между опорой 6 и силовой балкой 8, закрепленной жестко на оси 9, установлены скользящие кольца 20, 21. Силовая балка 8 снизу подпирается запорной гайкой 22, навинченной на ось 9.
Управление лебедками 12, 13 осуществляется с борта вертолета 1 путем подачи напряжения от источника питания через переключатель и кабель (не показаны).
Устройство работает следующим образом.
Вертолет 1 с грузом 7 на крюках 4, 5 грузовых строп 2, 3 зависает над заданным местом работ на необходимой высоте, причем по направлению вектора скорости ветра. При этом груз 7 занимает произвольное положение в горизонтальной плоскости, которое может значительно отличаться от требуемого. Для установки груза 7 в требуемое положение в горизонтальной плоскости с вертолета 1 подают напряжение на лебедки 12, 13 привода. Лебедка 12 начинает наматывать, а лебедка 13 синхронно сматывать гибкие связи 14, 15 с барабана 16. Барабан 16 под действием момента от сил натяжения гибких связей 14, 15 поворачивается в горизонтальной плоскости и одновременно с ним поворачивается силовая балка 8 с грузом 7. При достижении требуемого положения снимают управляющее напряжение с обмоток лебедок 12, 13. Изменение направления вращения груза в горизонтальной плоскости осуществляется изменением полярности сигнала на управляющих обмотках лебедок 12 и 13.
Предложенная система внешней подвески груза к вертолету позволяет улучшить эксплуатационные характеристики и повысить удобство пользования путем ориентирования груза в широком диапазоне углов в горизонтальной плоскости, что позволяет обеспечить наиболее благоприятные режимы висения вертолета с грузом и повысить его запас устойчивости. Кроме того, изменением скорости вращения груза можно достигнуть точного доворота его до требуемого положения установки. Нет также необходимости в использовании такелажников при установке тяжелых грузов в заданное положение в горизонтальной плоскости.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА К ВЕРТОЛЕТУ | 1992 |
|
RU2015074C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ БУКСИРУЕМОГО ТЕЛА | 1992 |
|
RU2006429C1 |
| СИСТЕМА КОНТРОЛЯ ПОЛОЖЕНИЯ ГРУЗА, ПОДВЕШЕННОГО НА ГИБКОЙ СВЯЗИ К ВЕРТОЛЕТУ ПРИ МОНТАЖНЫХ РАБОТАХ | 1992 |
|
RU2015075C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУЗОМ, ПОДВЕШЕННЫМ НА ВНЕШНЕЙ ПОДВЕСКЕ К ВЕРТОЛЕТУ | 1991 |
|
RU2005665C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПОТОКА В ОБЛАКАХ | 1992 |
|
RU2015072C1 |
| Буксируемая мишень для имитации летательных аппаратов | 1990 |
|
SU1837036A1 |
| Стенд для измерения характеристик поля антенны | 1990 |
|
SU1737374A1 |
| Устройство для измерения характеристик поля антенны | 1991 |
|
SU1810844A1 |
| Буксируемая плоская система | 1989 |
|
SU1835372A1 |
| Буксируемая плоская система | 1989 |
|
SU1835373A1 |

Использование: в авиационной технике, а именно на вертолетах при проведении монтажных работ по установке грузов. Сущность изобретения: система внешней подвески груза к вертолету 1 содержит грузовые стропы 2,3 с захватами 4,5, опору 6, силовую балку 8 и узел 7 ориентирования груза в горизонтальной плоскости. Опора 6 и силовая балка 8 прикреплены к вертолету 1, а грузовые стропы 2,3 закреплены на силовой балке 8. Силовая балка 8 выполнена с возможностью поворота относительно опоры 6 в горизонтальной плоскости, а узел ориентирования груза 7 в горизонтальной плоскости выполнен в виде привода, размещенного на опоре 6 и кинематически связанного с силовой балкой 8. Кроме того, привод выполнен в виде двух лебедок 12,13, размещенных на опоре 6 в диаметрально противоположных точках и связанных посредством двух гибких связей 14,15 с двумя секциями барабана 16, закрепленного на оси силовой балки 8. Изобретение позволяет улучшить эксплуатационные характеристики и повысить удобства пользования путем ориентирования груза в широком диапазоне углов в горизонтальной плоскости. 1 з.п. ф-лы, 3 ил.
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Патент США N 4378919, 244-118.1, 1983. | |||
