Изобретение относится к авиационной технике, в частности к устройствам ручного управления полетом летательного аппарата (ЛА) , например вертолета или других движущихся объектов.
Известен патент США N 4.012.014. кл. 244-83, 1977, содержащий шарнирно установленную относительно корпуса рукоятку и подлокотник, снабженный устройством, регулирующим его положение относительно корпуса.
Недостатками известного решения являются
неподвижность подлокотника относительно рукоятки и корпуса, а также недостаточная устойчивость руки при управлении ЛА при значительных перемещениях ручки.
Наиболее близким к изобретению по технической сущности и достигаемому результату является устройство, содержащее ручку управления, шарнирно установленную на корпусе, и подлокотник, снабженный механизмом регулирования его положения по высоте в зависимости от положения руки летчика, выполненного в виде жестко связанного с подлокотником криволинейного штока и жестко закрепленного на корпусе направляющей штока, а также фиксатора положения перемещения штока в виде подпружиненного стержня.
Недостатком известного решения являются неподвижность положения подлокотника относительно рукоятки и корпуса, т. е. после его регулирования по высоте, он остается в неподвижном, фиксированном состоянии во время управления ЛА, что не соответствует динамике движения руки летчика при больших - свыше 20. . . 30 мм перемещениях рукоятки, т. е. когда ход рукоятки управления ЛА превышает кистевые перемещения руки и перемещения локтя относительно подлокотника за счет упругости мышц руки;
неустойчивое положение руки летчика на подлокотнике, так как перемещения локтевого сустава руки летчика при больших перемещениях рукоятки управления происходит не только вдоль подлокотника, но и вверх относительно его, особенно при вертикальных перемещениях руки, например при работе рычагом управления общим шагом вертолета.
Целью изобретения является повышение удобства управления движущимся объектом путем отслеживания подлокотникам пространственного положения локтевого сустава руки оператора при перемещении ручки управления.
Это достигается тем, что регулирующий механизм снабжен основанием с шарнирами, на котором установлен подлокотник, подвижную опору и фиксатор с его органом управления, установленном на ручке, причем основание при помощи одного шарнира связано с ручкой управления, а при помощи другого - с подвижной опорой, нижний конец которой жестко связан с осью фиксатора, установленного на корпусе устройства, при этом ручка управления, основание, подвижная опора и корпус образуют многозвенный подвижный механизм, в котором соотношение высоты начального расположения шарниров на основании, которые одновременно связаны соответственно с ручкой и подвижной опорой, относительно корпуса выполнено в соотношении примерно один к двум или один к трем, а угол установки подвижной опоры в крайнем заднем положении составляет 50 ± 5о, причем фиксатор подвижной опоры установлен с возможностью продольного перемещения относительно корпуса, а его управляющий вход связан с органом управления, установленным на ручке.
В процессе проведения патентных исследований признаки, указанные в изобретении, не были обнаружены.
Переналаживаемые подлокотники известны в мировой практике, но переналадка у них фиксируемая, т. е. в процессе управления ЛА положение подлокотник не меняет, особенно в продольном направлении, поэтому известные признаки вместе с новыми признаками дают новый положительный эффект, а изобретение обладает существенными отличиями.
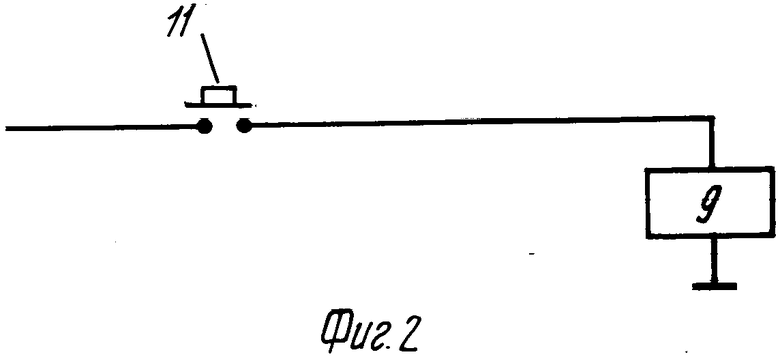
На фиг. 1 изображен общий вид устройства; на фиг. 2 - принципиальная электрическая схема управления фиксатором.
Устройство управления ЛА включает следующие узлы: ручку 1 управления ЛА с узлом 2 подвижности, корпус 3, подлокотник 4, основание 5 с шарнирами 6 и 7, подвижную опору 8, фиксатор 9 с осью 10 и орган управления фиксатором 11 (например, кнопка), установленным на ручке 1.
Ручка 1 при помощи узла 2 подвижности установлена шарнирно на корпусе 3. Подлокотник 4 установлен на основании 5, которое при помощи шарнира 6 связано с ручкой 1, а при помощи шарнира 7 - с подвижной опорой 8, другой конец которой механически связан с осью 10 фиксатора 9, установленного на корпусе 3 с возможностью продольного перемещения относительно корпуса 3.
Ручка 1 управления, основание 5, подвижная опора 8 и корпус 3 образуют четырехзвенный подвижный механизм, в котором соотношение высот ручки 1 управления и подвижной опоры 8 от корпуса 3 до основания 5 определяет исходное положение подлокотника 4 относительно корпуса 3 и составляет h2/h1 = 2-3, а исходный угол установки от подвижной опоры 8 относительно корпуса 3 45-55о. Это обеспечивает возможность поступательного перемещения подлокотника 4 при перемещении ручки 1. При этом подвижная опора 8 имеет возможность вращаться вместе с входной осью 10 фиксатора 9, а верхний конец опоры 8 с шарниром 7 совершает при движении подлокотника 4 вперед перемещение по дуге снизу вверх, перемещая соответственно задний конец подлокотника 4 и отслеживая при этом пространственное положение локтевого сустава руки оператора. Каждое положение опоры 8 и соответственно подлокотника 4 фиксируется фиксатором 9 относительно узла 2. Вход фиксатора 9 связан, например, электрически с кнопкой 11 управления на ручке 1. Фиксатор 9 выполнен в виде электромагнитного тормоза, входная ось 10 которого связана механически с подвижной опорой 8, корпус фиксатора 9 - жестко с корпусом 3 устройства, а электрический вход фиксатора 9 соединен электрически с кнопкой 11 управления на рукоятке ручки 1.
Фиксатор 9 относительно корпуса 3 установлен с возможностью поступательного перемещения, что необходимо для регулировки исходного угла установки подвижной опоры 8.
Устройство работает следующим образом.
В предлагаемом устройстве подлокотник 4 в процессе управления ручкой 1 отслеживает перемещение локтевого сустава руки летчика-оператора.
В исходном положении кисть руки летчика-оператора опирается на ручку 1, и локтевой сустав лежит на подлокотнике 4, установленном на основании 5, передний конец которого шарнирно связан с ручкой 1, а другой его конец опирается на подвижную опору 8, положение которой в данный момент зафиксировано фиксатором 9.
Для изменения положения ручки 1 управления оператор (летчик) нажимает кнопку 11 на ручке 1, подавая сигнал на вход фиксатора 9, который растормаживает подвижную опору 8, после чего летчик может переместить ручку 1 в требуемое положение.
Это перемещение сопровождается вертикально-поступательным перемещением подлокотника 4, так как опора 8 шарнирно связана и с подлокотником 4 и с механизмом 9 ее положения.
Начальное положение подвижной опоры 8 относительно корпуса 2 выбрано таким, что перемещение ручки 1 "вперед" вызывает одновременно подъем подлокотника опорой 8 вверх, сохраняя контакт локтевого сустава руки летчика с подлокотником 4, т. е. не нарушая его прилегания к подлокотнику 4.
Ручка управления 1, подлокотник 4, подвижная опора 8 и корпус 3 образуют четырехзвенный подвижный механизм, в котором соотношение высот ручки h1 от корпуса 3 до шарнира подлокотников и высоты h2 шарнира 7 подвижной опоры 8 составляет h2/h1 = 2-3, что в сочетании с заданным исходным (в заднем крайнем положении) углом установки подвижной опоры, равным 50 ± 5о, создавая удобное положение руки летчика. В процессе работы четырехзвенный механизм обеспечивает сложное движение подлокотника 4 и отслеживание перемещения локтевого сустава руки летчика, а именно вперед и вверх, при этом траектория движения подлокотника совпадает с перемещением локтевого сустава. Таким образом локтевой сустав руки летчика при перемещениях ручки 1 не провисает в воздухе, а постоянно опирается на подлокотник 4, что снимает физическую нагрузку на летчика и его руку в процессе управления, повышает удобство и точность управления ЛА. В новом положении летчик отпускает кнопку 11 и тем самым снимает сигнал с механизма фиксации 9, фиксируя новое положение ручки 1. В качестве механизма фиксации 9 может быть использован электромагнитный тормоз, который жестко связан с корпусом 3 устройства, а через входной вал - шарнир 10 с подвижной опорой 8. Для обеспечения регулировки исходного положения подвижной опоры 8 предусмотрена возможность поступательного перемещения механизма 9 фиксации по направляющим пазам относительно корпуса 3.
Использование изобретения позволяет обеспечить устойчивое положение руки летчика на подлокотнике, так как подлокотник во время управления ЛА отслеживает перемещения руки летчика.
При больших, свыше 20. . . 25 мм, перемещениях рукоятки, т. е. когда ход ручки управления ЛА превышает кистевые перемещения руки и перемещения локтя за счет упругости мышц руки, рука летчика приобретает неустойчивое положение и несет физическую нагрузку, как и все тело летчика, от этого возникают ощущения неудобства управления с подлокотником, неподвижным относительно корпуса.
Локтевой сустав руки летчика совершает при управлении ЛА сложное движение за ручкой управления вперед и вверх или, наоборот при движении ручки назад и, если он не поддерживается, как, например, в случае работы с рычагом общего шага вертолета, летчик испытывает дополнительные физические нагрузки, что повышает утомляемость летчика, а следовательно, влияет на точность пилотирования.
В предлагаемом устройстве подлокотник отслеживает все перемещения локтевого сустава руки летчика, которые позволяют ему выполнять шарнирная связь подлокотника с ручкой управления и с подвижной опорой, установленной на корпусе при помощи механизма фиксации.
Таким образом локтевой сустав руки летчика при перемещениях ручки 1 не повисает в воздухе, а постоянно опирается на подлокотник 4, что снижает физическую нагрузку на летчика и его руку в процессе управления, повышает удобство и точность управления ЛА.
Точность управления и устойчивость руки на подлокотнике еще усиливаются тем, что каждое новое положение подлокотника при перемещении ручки управления и руки летчика фиксируется механизмом, который связан электрически с кнопкой на ручке управления. (56) Патент США N 4012014, кл. B 64 C 13/04, 1977.
Авторское свидетельство СССР N 1378258, кл. B 64 C 13/06, 1985.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОКОВАЯ КИСТЕВАЯ РУЧКА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1999 |
|
RU2164878C2 |
| Устройство для разработки подвижности плечевого сустава | 2017 |
|
RU2653811C1 |
| Устройство для обучения управлению подвижными объектами с помощью джойстиков | 2019 |
|
RU2724939C1 |
| Многофункциональное устройство управления подвижным объектом | 2015 |
|
RU2616231C2 |
| Роботизированное устройство тренажера для реабилитации конечностей и способ его применения | 2021 |
|
RU2766754C1 |
| КИНЕСТЕТИЧЕСКОЕ УСТРОЙСТВО УПРАВЛЕНИЯ ДВИГАТЕЛЯМИ САМОЛЕТА | 1997 |
|
RU2114029C1 |
| Рукоятка ручки управления | 1990 |
|
SU1818270A1 |
| Кресло микрохирурга | 2017 |
|
RU2672019C1 |
| УСТРОЙСТВО ДЛЯ ПОДДЕРЖКИ СПОСОБНОСТИ САМОСТОЯТЕЛЬНОГО ПЕРЕМЕЩЕНИЯ ОГРАНИЧЕННОГО В СВОЕЙ МОБИЛЬНОСТИ ЧЕЛОВЕКА | 2019 |
|
RU2774223C1 |
| СПОСОБ КИНЕСТАТИЧЕСКОЙ ПЕРЕДАЧИ ЛЕТЧИКУ ПИЛОТАЖНОЙ ИНФОРМАЦИИ | 1996 |
|
RU2095279C1 |
Изобретение относится к авиационной технике и может быть использовано в конструкциях органов управления летательных аппаратов. Цель изобретения - повышение удобства управления путем отслеживания подлокотником пространственного положения локтевого сустава руки оператора при перемещении ручки управления. Регулирующий механизм подлокотника 4 снабжен основанием 5, на котором установлены сам подлокотник 4, подвижная опора 8 и фиксатор 9. Основание 5 шарнирно связано с ручкой 1 управления и подвижной опорой 8, нижний конец которой жестко связан с осью 10 фиксатора 9, который установлен на корпусе 3 с возможностью продольного перемещения, а его управляющий вход связан с органом управления, установленным на ручке 1. Ручкой 1, основанием 5, подвижной опорой 8 и корпусом 3 образован многозвенный механизм. 1 з. п. ф-лы, 2 ил.
