Изобретение относится к авиации и может быть использовано при пилотировании летчиком летательного аппарата (ЛА).
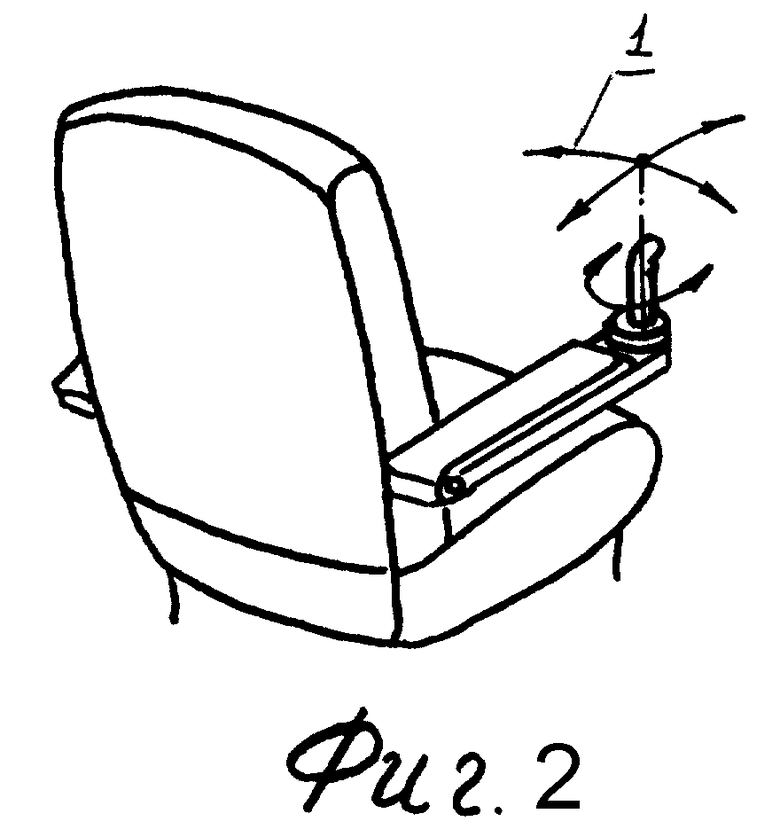
Реализация на борту современного ЛА электродистанционной системы управления позволило осуществлять его управление небольшими боковыми мини-рычагами, установленными на подлокотниках кресла (фиг. 2) [1]
Мини-ручка имеет три вращательные степени свободы: от себя на себя, влево вправо и вокруг своей вертикальной оси, а РУДы одну вращательную: от себя на себя.
Это создало технические предпосылки для реализации изобретения на борту ЛА.
Известное устройство с помощью системы автотриммирования рычагов управления, позволяет реализовать способ кинестатической передачи летчику пилотажной информации, в котором об оборотах двигателей судят по углу поворота рычагов управления двигателями от себя на себя, об угле атаки по углу поворота ручки от себя на себя, об угле крена по углу поворота ручки влево вправо, об угле скольжения по углу поворота ручки вокруг вертикальной оси.
Таким образом по положению рычагов управления (точнее по изгибу суставов кистей рук, находящихся на рычагах управления) летчик имеет возможность судить об угловом положении ЛА относительно вектора скорости и косвенно о величине скорости полета. Например фиг. 1, если система автоматизированного управления ЛА обеспечивает пропорциональную зависимость между отклонением ручки управления ЛА (1) влево-вправо и креном, отклонением ручки (2) от себя на себя и углом атаки, углом поворота мини-ручки вокруг вертикальной оси (4) и углом скольжения, то летчик по положению ручки (после окончания переходных процессов в системе автоматизированного управления) имеет возможность судить об угле крена, угле атаки и угле скольжения.
Тогда, сопоставляя акселерационные ощущения с величиной угла атаки, летчик имеет возможность косвенно судить о скорости полета. Кроме того, угловое положение рычагов управления двигателями (РУДов) (7) также дает косвенную информацию о скорости установившегося горизонтального полета. Однако совершенно отсутствует кинестатическая информация как о направлении скорости полета и ее величине, так и об ориентации ЛА в пространстве.
Таким образом передача летчику кинестатической информации об углах атаки, скольжения, крена и косвенно о скорости полета не в полной мере обеспечивает безопасность полета, особенно в сложных метеоусловиях, при отказе системы индикации и в других случаях, когда летчик не имеет возможности визуально получить информацию об ориентации ЛА в его направлении полета в пространстве.
Технические результаты использования изобретения сводятся к следующему.
1. Улучшается пространственная ориентировка летчика за счет того, что он непрерывно (в любой момент времени) получает информацию о направлении и величине вектора скорости и всех углах ориентации ЛА в пространстве.
2. Увеличиваются резервы внимания летчика за счет того, что летчику в значительно меньшей степени требуется переводить взгляд на приборы, а при визуальном пилотировании (или кратковременной потере визуального контакта с землей) этого вообще не требуется.
3. Повышается вероятность обнаружения и парирования нештатных ситуации за счет того, что значительные резервы внимания используются летчиком для усиления осмотрительности в кабине и в закабинном пространстве, а также за счет наличия информации о тенденции изменения направления и величины вектора скорости. За счет этого же повышается точность пилотирования.
4. Повышается вероятность успешного завершения полета в сложных метеоусловиях при полном отсутствии визуальной видимости (даже в случае полного отказа систем индикации) за счет того, что летчик по командам с земли имеет возможность продолжать полет и даже выполнить заход на посадку.
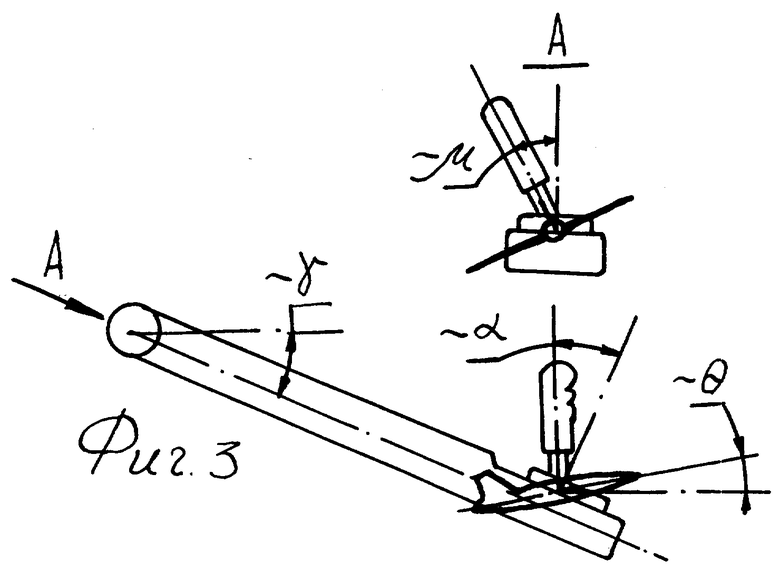
5. Обеспечивается высокий психологический комфорт за счет того, что летчик как бы "держит" ЛА (фиг. 3) в своих руках (механическую модель движения и ориентации ЛА в пространстве) и "чувствует" каждое его движение, а также непрерывно контролирует степень близости параметров движения к ограничениям в силу ограниченности отклонений ручки и подлокотников.
6. Повышается уровень контроля за функционированием автоматики за счет того, что в автоматическом режиме полета летчик непрерывно контролирует ее работу.
7. Снижается утомляемость летчика в длительных полетах и при воздействии перегрузок.
В целом повышается безопасность и эффективность выполнения полета.
Указанные технические результаты достигаются тем, что способ кинестатической передачи летчику пилотажной информации, в котором об оборотах двигателей судят по углу поворота рычагов управления двигателями от себя на себя, об угле атаки по углу поворота ручки от себя на себя, об угле крена по углу поворота ручки влево вправо, об угле скольжения по углу поворота ручки вокруг вертикальной оси, отличается тем, что об угле наклона траектории судят по углу наклона правого подлокотника кресла пилота вверх - вниз, об угле рассогласования текущего и заданного угла пути по углу отклонения правого подлокотника влево вправо, о величине скорости по положению рычагов управления двигателей на левом подлокотнике и об ориентации летательного аппарата в пространстве по угловому положению ручки в кабине.
Таким образом летчику кинестатически передается информация не только об ориентации ЛА относительно вектора скорости, но и о величине и направлении самого вектора скорости (фиг. 1) путем поворота правого подлокотника кресла вверх-вниз (5) пропорционально углу наклона траектории и влево-вправо (6) пропорционально рассогласованию угла пути от задаваемого значения, а также путем перемещения РУДов вдоль левого подлокотника кресла (3) пропорционально скорости полета. В этом случае подлокотник является как бы действующей физическою (точнее механической) моделью вектора скорости, начинающегося от оси вращения подлокотника и заканчивающегося на рычагах управления. В результате по положению рук, лежащих на подлокотниках (а именно по изгибам руки в плечевом и локтевом суставах), летчик имеет возможность с определенной точностью непосредственно судить о величине и направлении скорости полета, а также о тенденции ее изменения в пространстве. Кроме того (фиг. 3), в этом случае сама ручка является как бы действующей механической моделью ориентации ЛА в пространстве относительно поверхности земли (относительно пола кабины), так как на ней естественным образом реализуется известное кинематическое соотношение между углами тангажа θ крена m рыскания j атаки a скольжения b наклона траектории g и пути c Предлагаемый подход может быть полностью согласован с системой индикации [2]
Изобретение обеспечивает "полярный" стереотип управления ЛА, при котором летчик правой рукой управляет ориентацией вектора скорости ЛА в пространстве, а левой его модулем.
На фиг. 1 изображены используемые в изобретении перемещения подлокотника и ручки: на фиг. 2 расположенная на подлокотнике кресла мини-ручка;
1 отклонение ручки, пропорциональное углу крена ( m );
2 отклонение ручки, пропорциональное углу атаки (a);
3 перемещение РУДов вдоль левого подлокотника, пропорциональное величине скорости полета (V);
4 отклонение ручки, пропорциональное углу скольжения (b);
5 отклонение правого подлокотника, пропорциональное углу наклона траектории (g);
6 отклонение правого подлокотника, пропорциональное рассогласованию текущего и заданного углов пути (Dc);
7 отклонение РУДа, пропорциональное оборотам двигателя (h);
на фиг. 3, 4, 5 взаимное положение правого подлокотника и ручки в трех видах, соответственно, левого подлокотника; на фиг. 6 реализованное в изобретении кинематическое соотношение между углами тангажа q крена m рыскания j атаки a скольжения b наклона траектории g пути c
Устройство, реализующее способ, содержит кресло пилота с вращающимися подлокотниками, на которых установлены мини- рычаги управления ЛА. В силу невысокой скорости изменения углов наклона траектории, пути и скорости полета, а также их ограниченности на режимах точного пилотирования ЛА, поворот подлокотника и перемещение по нему РУДов могут быть легко реализованы с помощью известных электромеханических или электрогидравлических следящих систем, отрабатывающих поступающие сигналы соответствующих параметров движения ЛА. В настоящее время аналогичные системы автотриммирования рычагов используются на борту ЛА в режиме автоматического управления.
В качестве примера (фиг. 1, 3, 4, 5, 6) рассмотрим выполнение летчиком разворота ЛА в горизонтальной плоскости на заданный угол пути без использования приборов при отсутствии визуальной видимости. В начальный момент руки занимают удобное положение на подлокотниках с нейтральным положением ручки по крену (1) и взятой на себя ручкой по углу атаки (2), что соответствует горизонтальному прямолинейному полету с заданной скоростью.
Пусть заданный угол пути находится левее, тогда правый подлокотник повернут на небольшой угол вправо (6). Для выполнения разворота с заданным креном летчик отклоняет ручку влево (1) на определенную величину, при этом возникает тенденция к опусканию подлокотника (5) (уменьшению угла наклона траектории), которую летчик парирует взятием ручки на себя (2), а тенденцию движения РУДов по подлокотнику назад (3) (из-за уменьшение скорости) парирует движением РУДов вперед (7). При этом летчик как бы противодействует движению подлокотника и перемещению РУДа. При подходе к заданному углу пути подлокотник начинает движение к нейтральному положению (6). Для асимптотического выхода на заданный угол пути летчик по мере приближения подлокотника к нейтральному положению уменьшает отклонение ручки влево (1) (и тем самым уменьшает крен и соответственно скорость поворота подлокотника) с тем, чтобы в момент нейтрального положения подлокотника ручка по крену тоже оказалась в нейтральном положении. В целях обеспечения безопасности маневра летчик прежде всего контролирует угол атаки по степени взятия ручки на себя (2), а также угол скольжения по повороту ручки вокруг вертикальной оси (4). Отклоняя в процессе пилотирования ручку и РУД, летчик задает желаемую угловую ориентацию ЛА в пространстве и скорость полета. При этом усилие на рычагах управления ЛА сохраняется до тех пор, пока задаваемые значения параметров движения не будут достигнуты. Если отклонение от задаваемых параметров возникает вследствии воздействия внешних возмущений, то летчик для сохранения текущих параметров движения ЛА должен при возникновении усилия сохранить положение рычагов управления, удерживая их в прежнем положении.



Изобретение относится к авиации и может быть использовано при пилотировании летчиком летательного аппарата (ЛА). От технической реализации изобретения следует ожидать повышения безопасности полета и точности пилотирования в условиях отсутствия визуального контакта как с землей, так и с пилотажными приборами. Сущность изобретения состоит в том, что за счет автотриммирования рычагов управления ЛА и подлокотников кресла (реализации механической модели движения ЛА в пространстве) летчик по положению рук имеет возможность судить не только об углах ориентации ЛА относительно вектора скорости, но и о направлении и величине самого вектора скорости и углах ориентации ЛА в пространстве. 6 ил.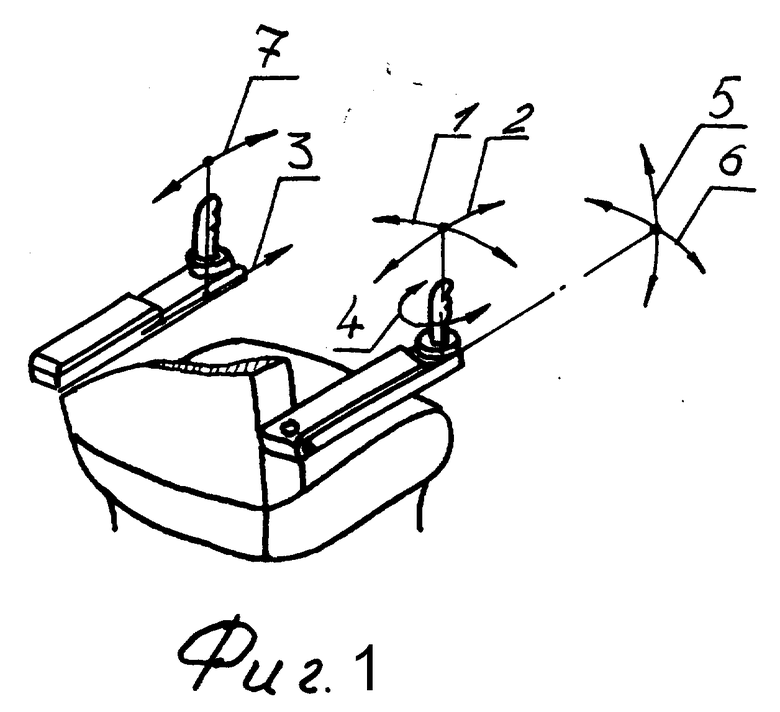
Способ кинестатической передачи летчику пилотажной информации, в котором об оборотах двигателей судят по углу поворота рычагов управления двигателями от себя на себя, об угле атаки по углу поворота ручки от себя на себя, об угле крена по углу поворота ручки влево вправо, об угле скольжения по углу поворота ручки вокруг вертикальной оси, отличающийся тем, что об угле наклона траектории судят по углу наклона правого подлокотника кресла пилота вверх вниз, об угле рассогласования текущего и заданного угла пути по углу отклонения правого подлокотника влево вправо, о величине скорости по положению рычагов управления двигателей на левом подлокотнике и об ориентации летательного аппарата в пространстве по угловому положению ручки в кабине.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| GB, патент, 2073114, кл | |||
| Нефтяной конвертер | 1922 |
|
SU64A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| DE, патент, 3904077, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
